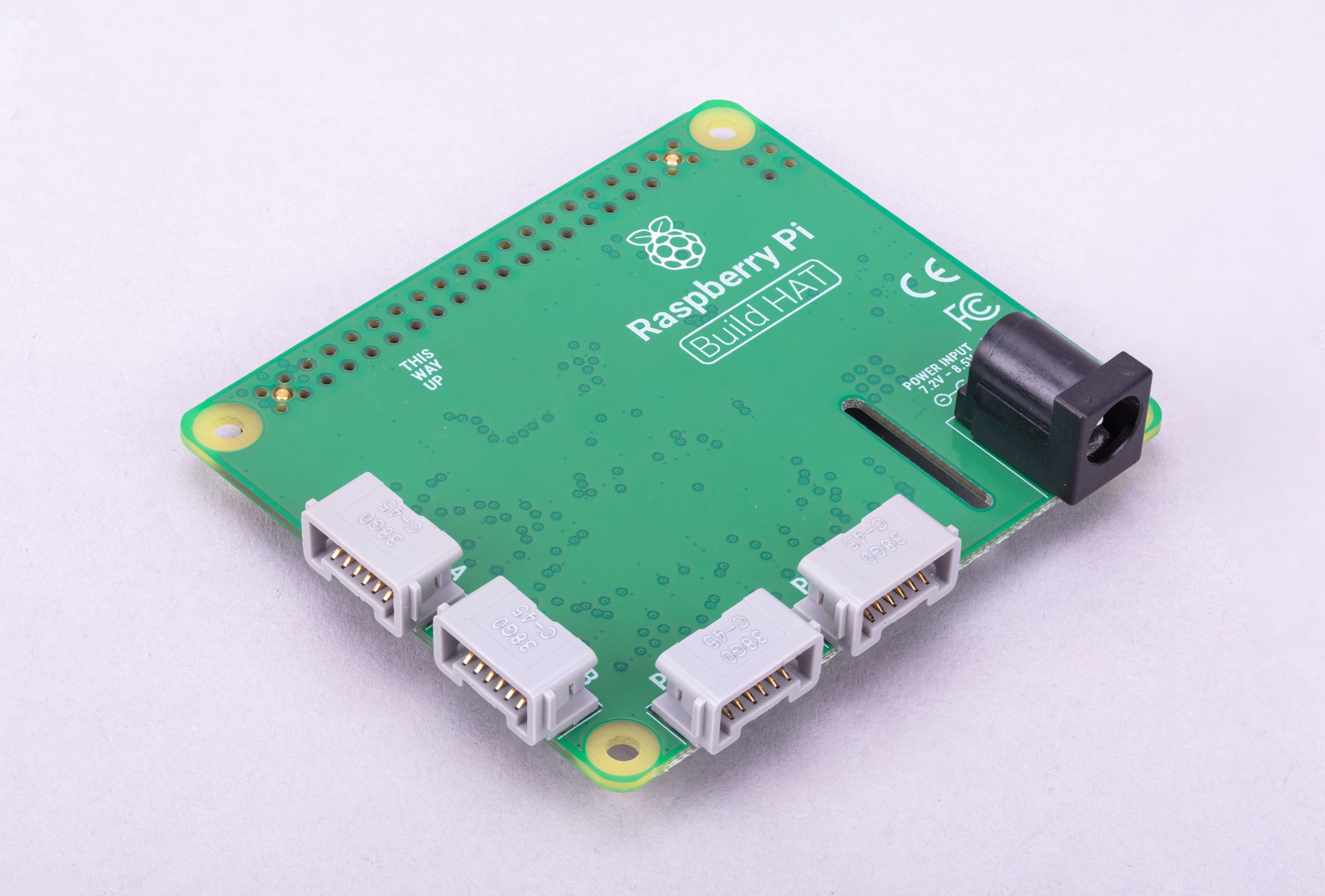
Add Raspberry Pi build HAT (#1752)
Showing
{kind=link}

162.3 KB
src/devices/BuildHat/Brick.cs
0 → 100644
此差异已折叠。
src/devices/BuildHat/BuildHat.sln
0 → 100644
src/devices/BuildHat/README.md
0 → 100644
此差异已折叠。
{kind=link}

196.8 KB
{kind=link}
257.6 KB
src/devices/BuildHat/category.txt
0 → 100644
{kind=link}

88.9 KB
文件已添加
src/devices/BuildHat/data/version
0 → 100644
{kind=link}

98.2 KB
{kind=link}

168.0 KB
{kind=link}

179.8 KB
{kind=link}
189.6 KB
{kind=link}

140.4 KB
{kind=link}

131.4 KB
{kind=link}
178.7 KB