[update] 添加 RA 系列 BSP 开发教程: (#5598)
- 添加 RA 系列 BSP 开发教程 - 添加 ra6m4-iot PPP 上网 - 整理 驱动文件
Showing
bsp/renesas/README.md
0 → 100644
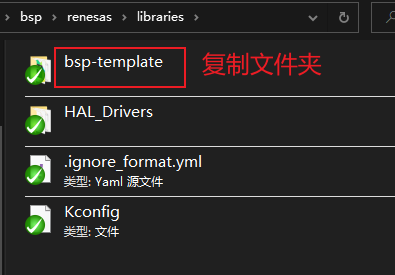
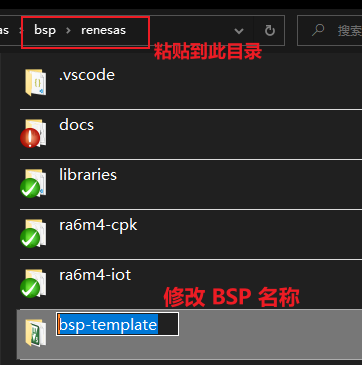
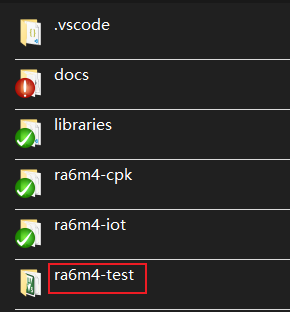
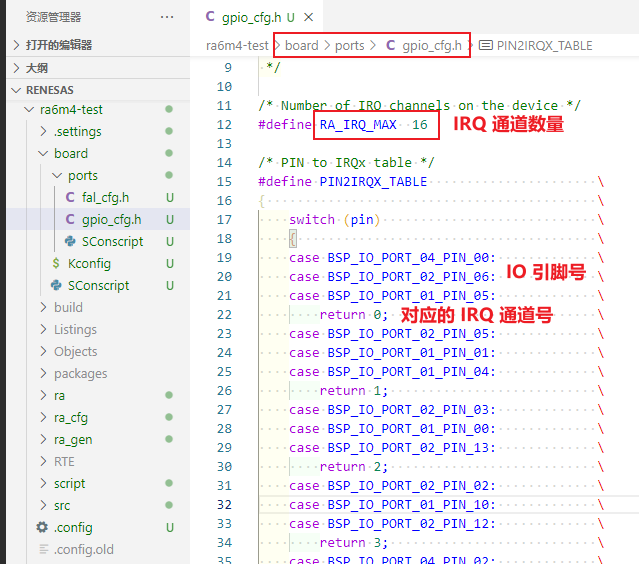
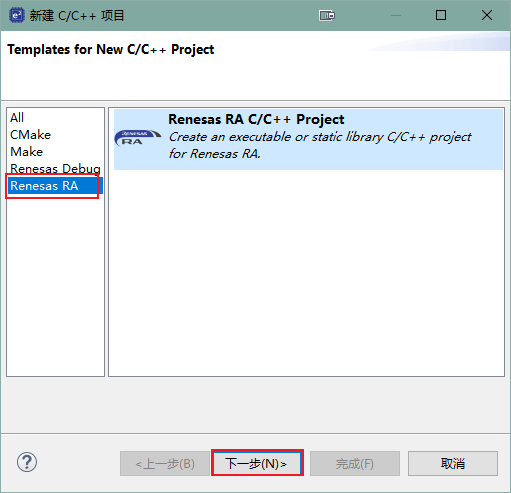
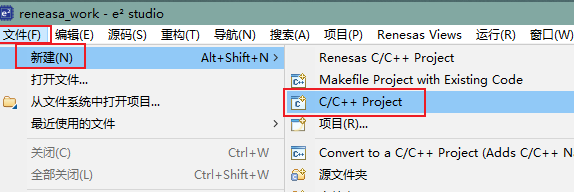
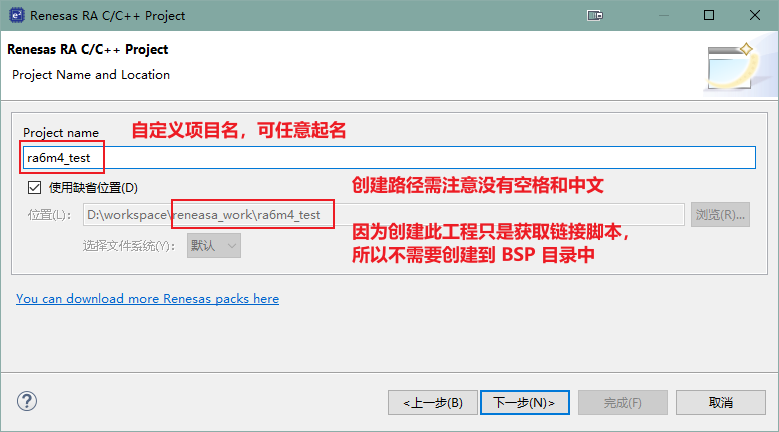
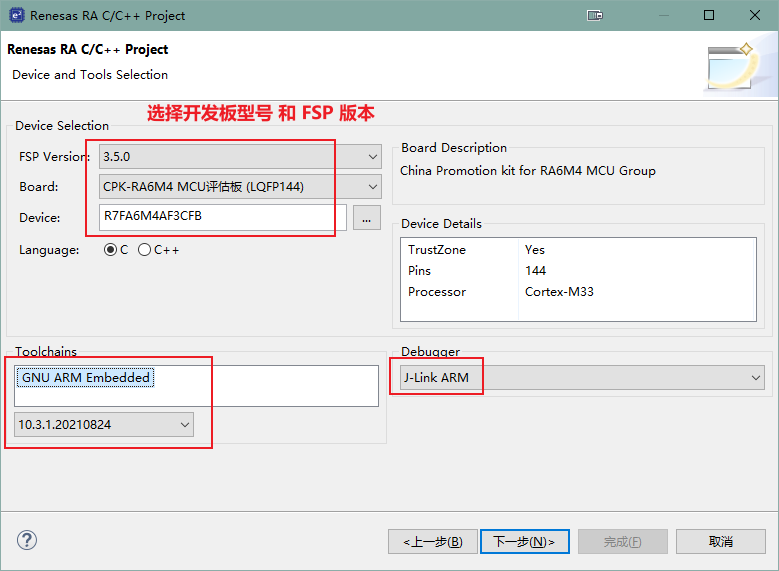
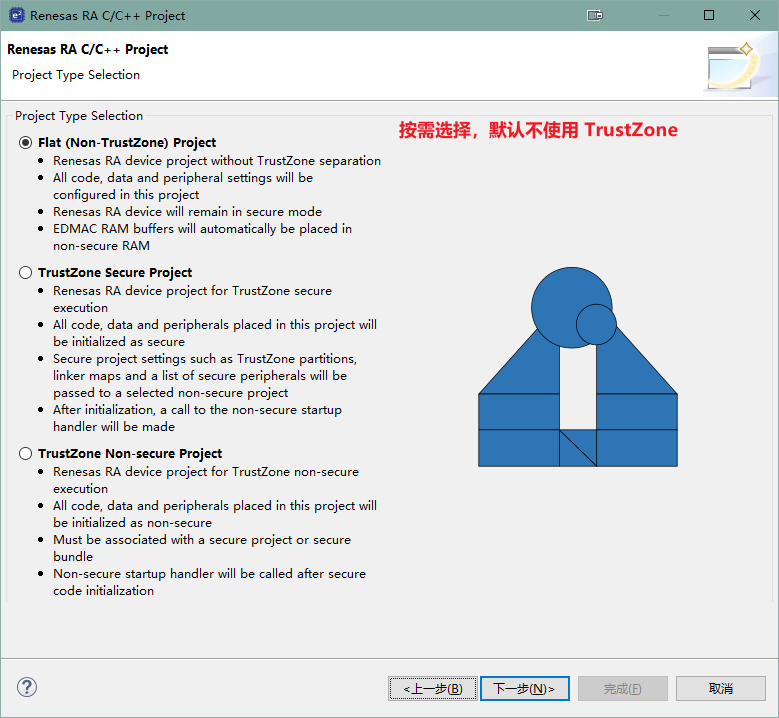
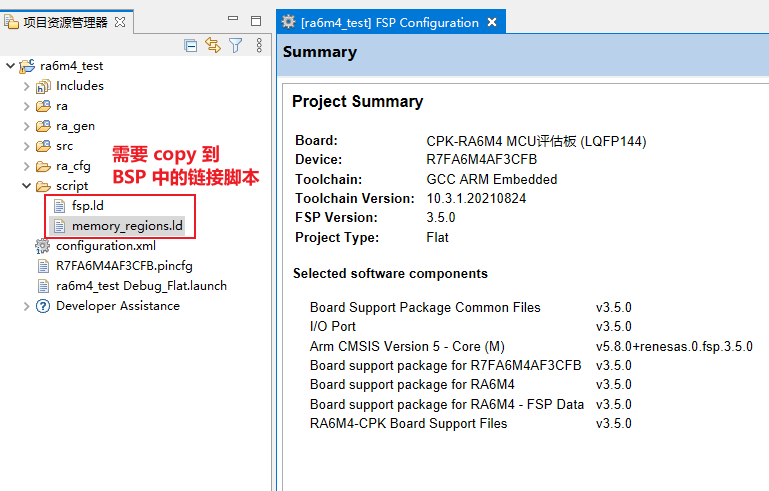
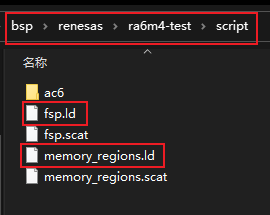
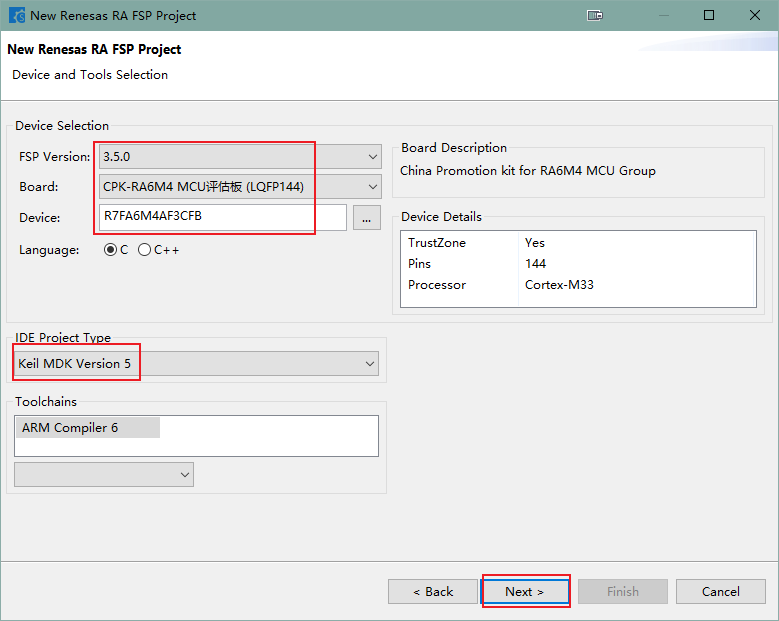
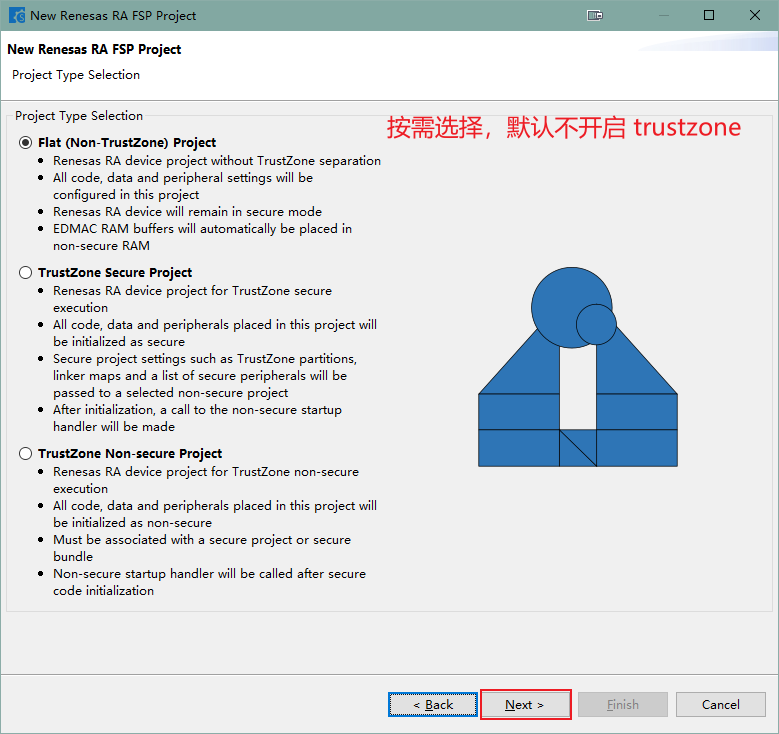
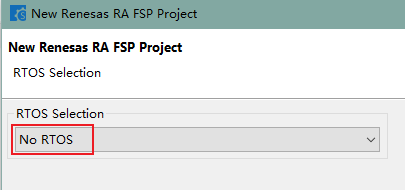
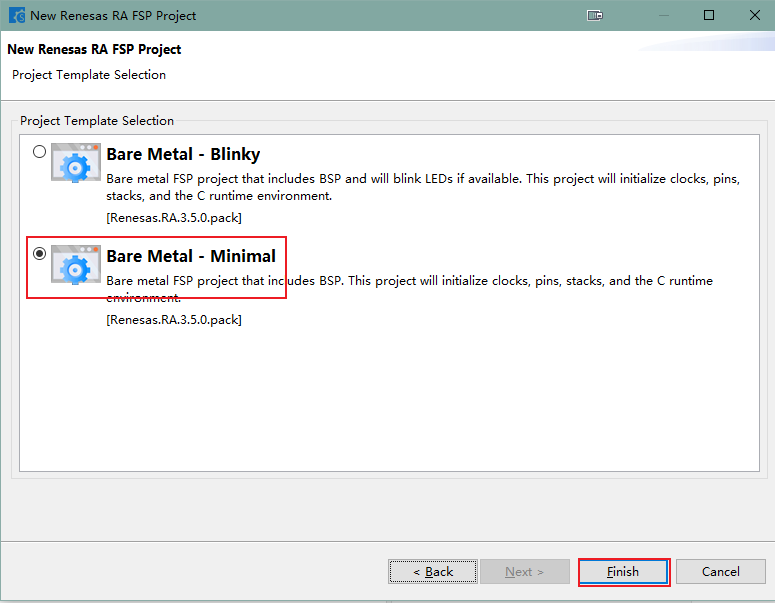
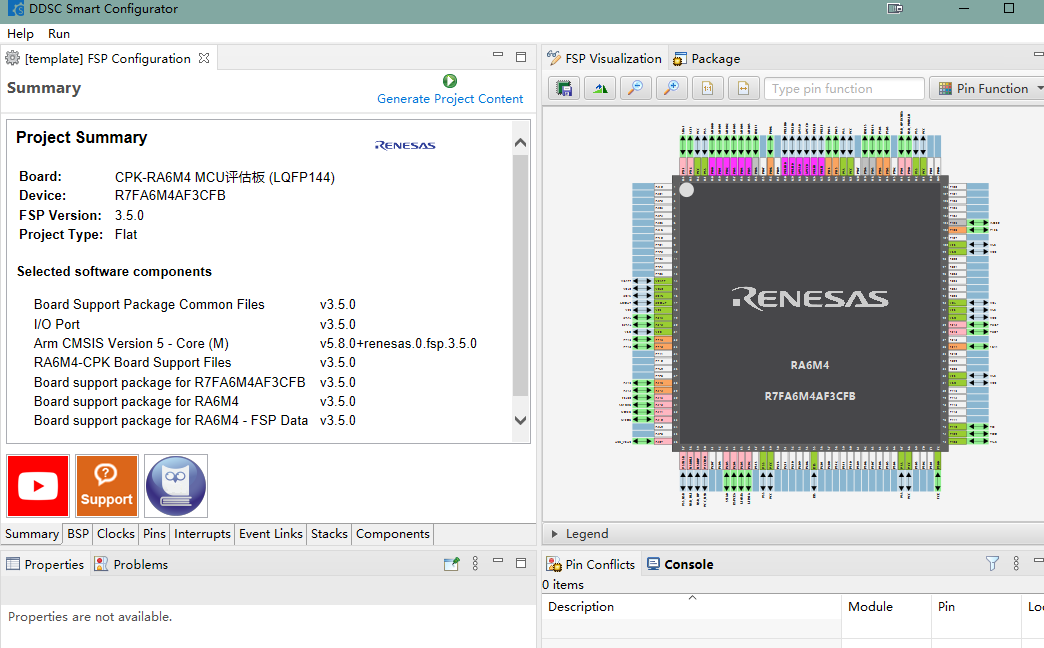
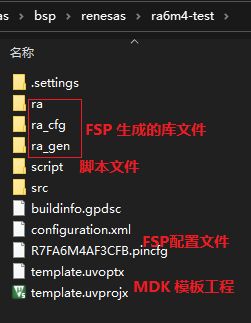
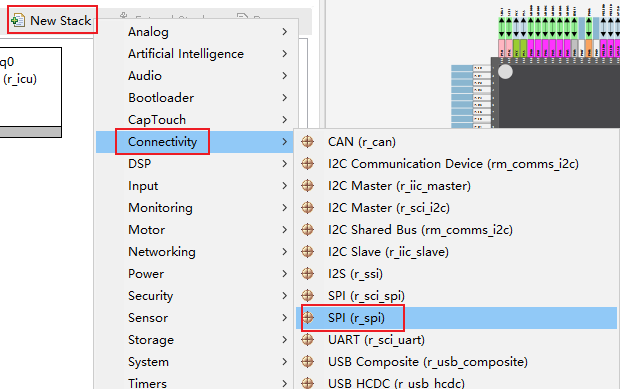
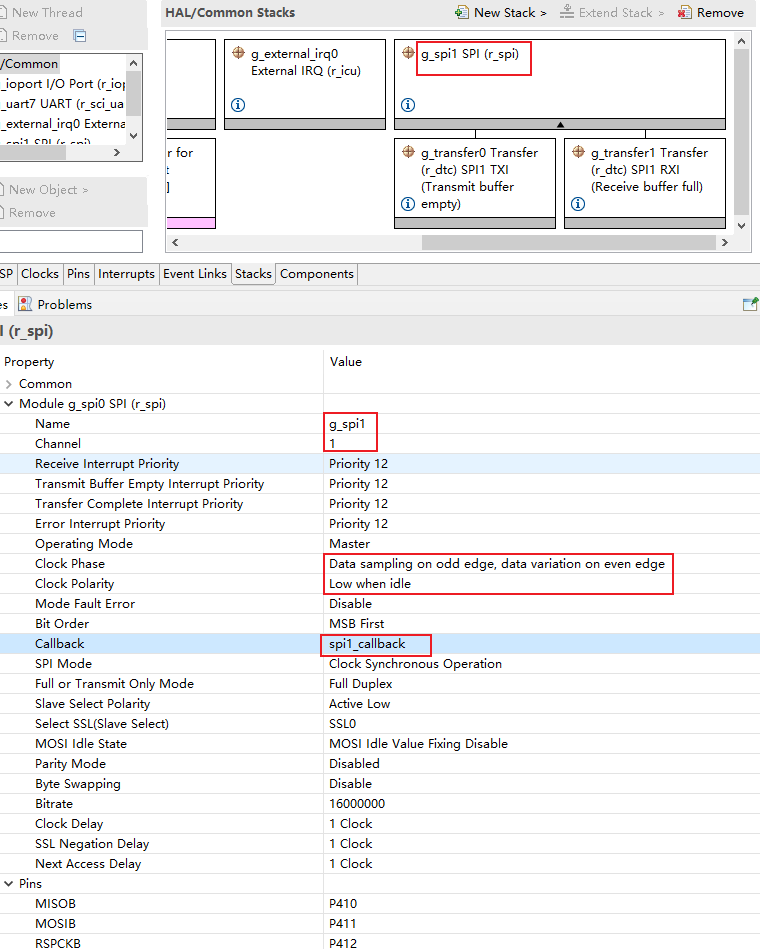
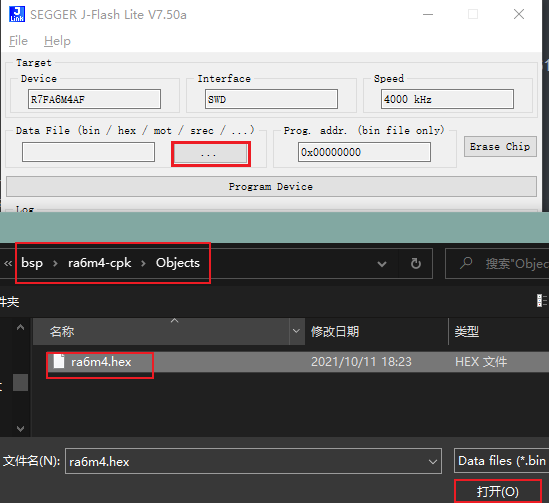
bsp/renesas/docs/RA系列BSP制作教程.md
0 → 100644
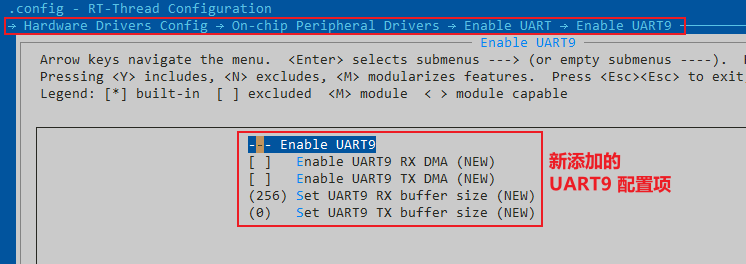
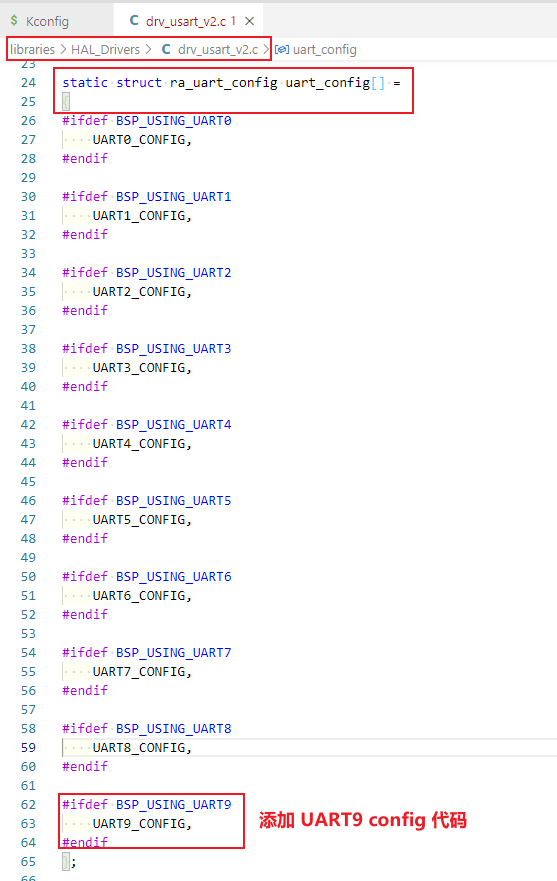
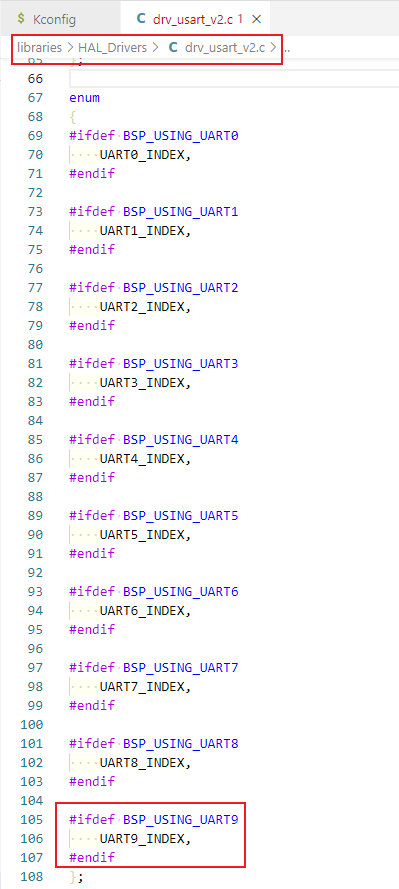
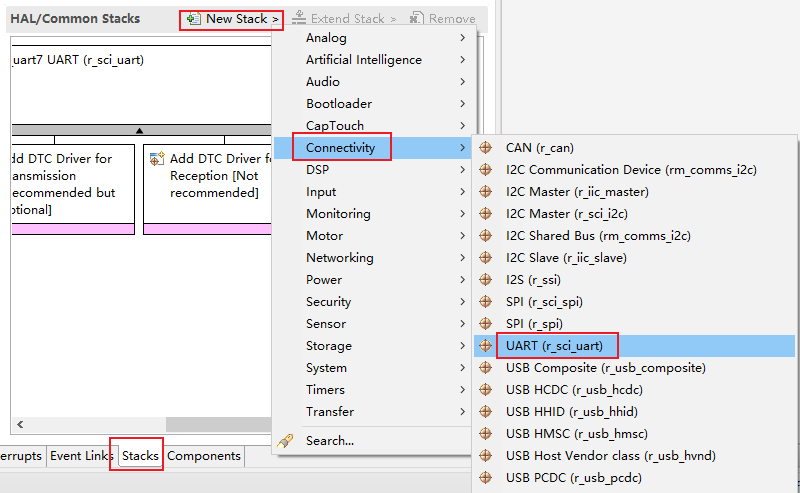
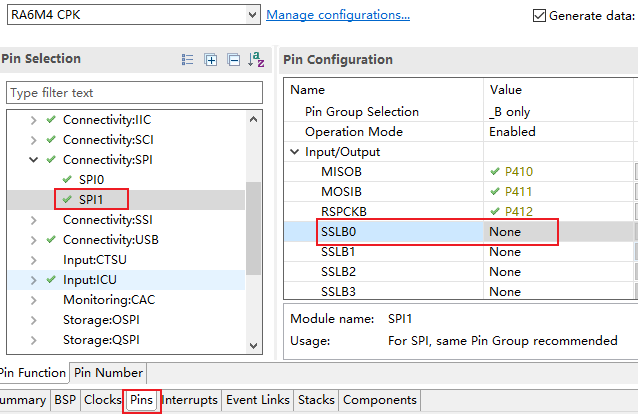
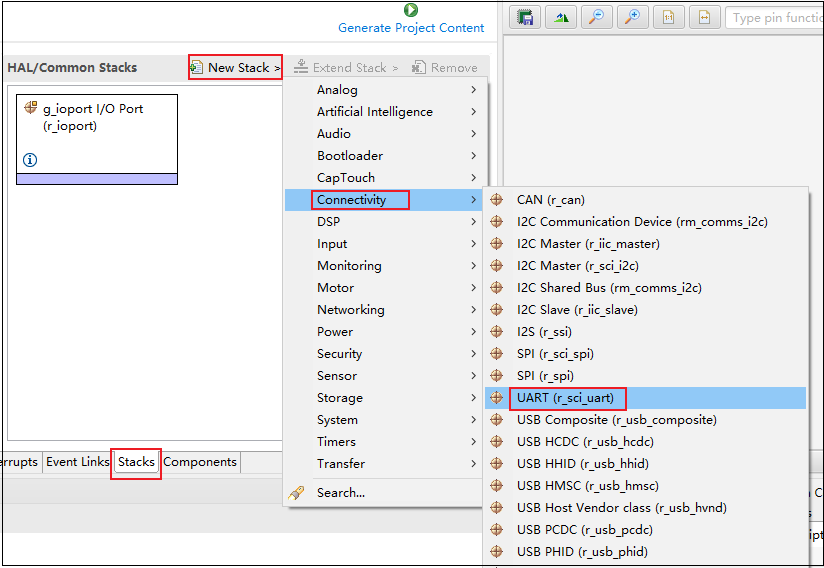
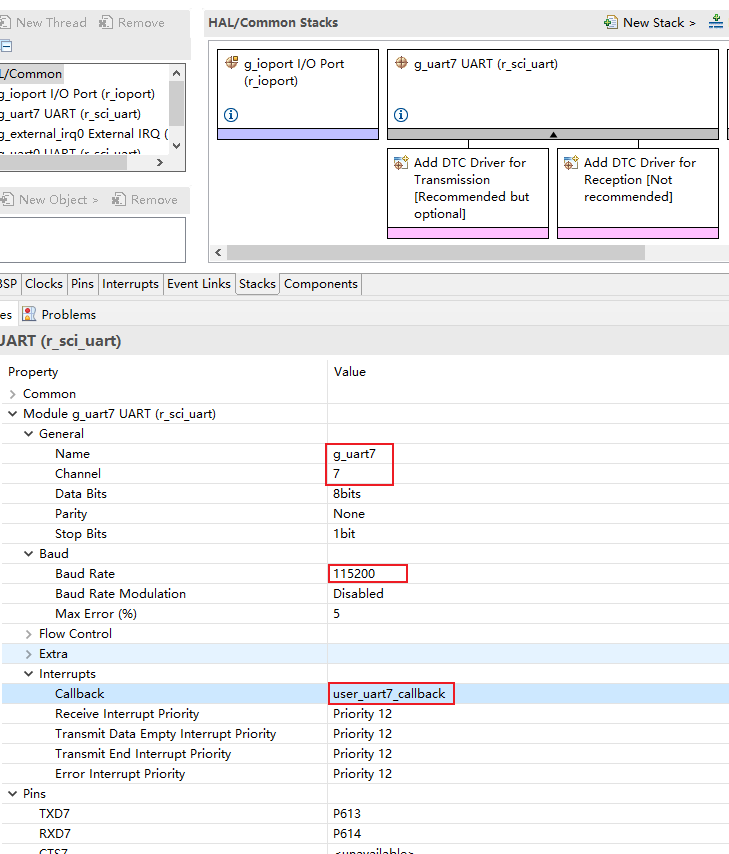
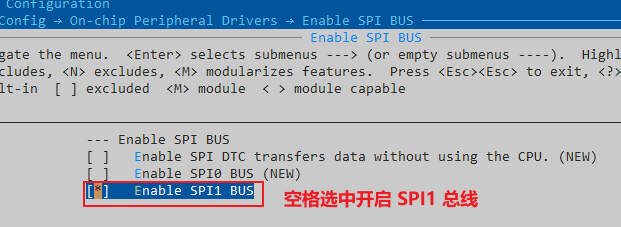
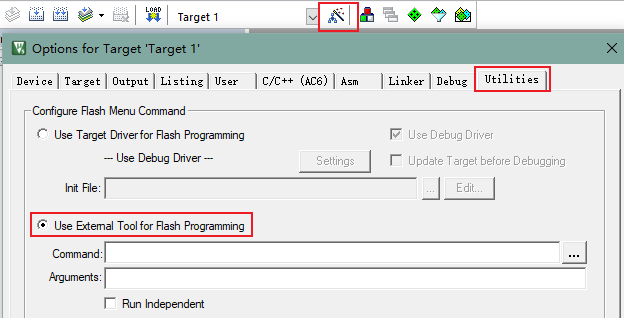
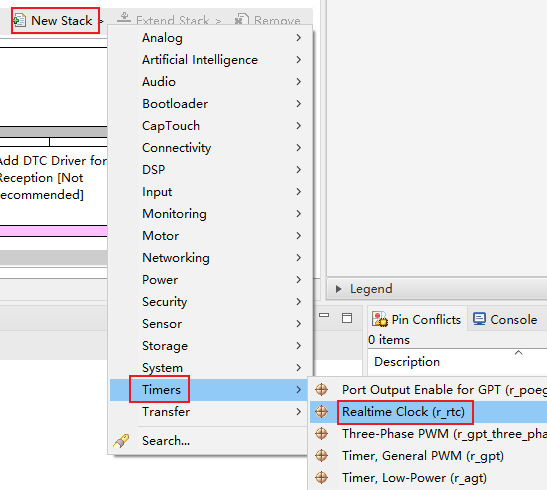
bsp/renesas/docs/RA系列外设驱动添加指南.md
0 → 100644
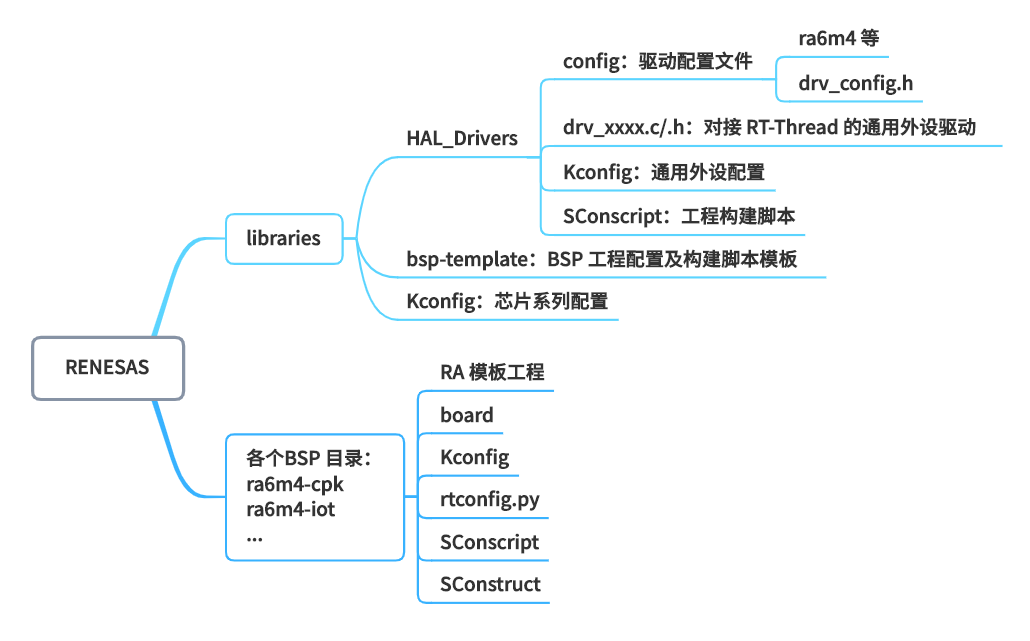
bsp/renesas/docs/RA系列驱动介绍.md
0 → 100644
{kind=link}
文件已移动
{kind=link}
11.1 KB
{kind=link}
98.6 KB
{kind=link}
22.7 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
8.1 KB
{kind=link}
29.0 KB
{kind=link}
27.6 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
72.7 KB
{kind=link}
93.0 KB
{kind=link}
28.1 KB
{kind=link}

60.6 KB
{kind=link}
55.9 KB
{kind=link}
44.4 KB
{kind=link}
47.2 KB
{kind=link}
27.9 KB
{kind=link}
34.2 KB
{kind=link}
4.6 KB
{kind=link}
65.0 KB
{kind=link}
17.8 KB
{kind=link}
23.2 KB
{kind=link}
14.4 KB
{kind=link}
79.9 KB
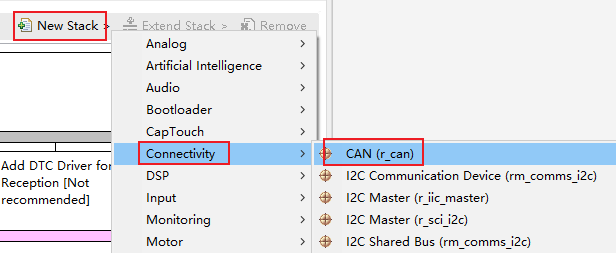
bsp/renesas/docs/figures/can.png
0 → 100644
{kind=link}
16.2 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
35.3 KB
{kind=link}
29.9 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
910.9 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
19.0 KB
{kind=link}
24.1 KB
{kind=link}
49.4 KB
{kind=link}
38.1 KB
{kind=link}
60.3 KB
{kind=link}
58.0 KB
{kind=link}
5.4 KB
{kind=link}
文件已移动
{kind=link}
61.5 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}

16.8 KB
{kind=link}
24.0 KB
{kind=link}
50.5 KB
{kind=link}
5.7 KB
{kind=link}
27.8 KB
{kind=link}
98.2 KB
{kind=link}
13.4 KB
{kind=link}
38.4 KB
{kind=link}
46.4 KB
{kind=link}
30.9 KB
{kind=link}
51.5 KB
{kind=link}
36.9 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
23.0 KB
{kind=link}
5.3 KB
{kind=link}
9.6 KB
{kind=link}
26.4 KB
{kind=link}
23.5 KB
{kind=link}
10.3 KB
{kind=link}
11.7 KB
{kind=link}
87.1 KB
{kind=link}
22.0 KB
{kind=link}

9.9 KB
{kind=link}
24.0 KB
{kind=link}
18.9 KB
{kind=link}
19.0 KB
{kind=link}

9.8 KB
{kind=link}
37.6 KB
{kind=link}
21.1 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
19.0 KB
bsp/renesas/docs/figures/rtc.png
0 → 100644
{kind=link}
27.1 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
bsp/renesas/docs/figures/save.png
0 → 100644
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
bsp/renesas/docs/figures/wdt.png
0 → 100644
{kind=link}
此差异已折叠。
{kind=link}
文件已移动
{kind=link}
文件已移动
此差异已折叠。
此差异已折叠。
文件已移动
此差异已折叠。
文件已移动
文件已移动
文件已移动
文件已移动
此差异已折叠。
文件已移动
文件已移动
文件已移动
此差异已折叠。
文件已移动
文件已移动
文件已移动
文件已移动
此差异已折叠。
此差异已折叠。
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
此差异已折叠。
文件已移动
此差异已折叠。
文件已移动
文件已移动
bsp/renesas/libraries/Kconfig
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
文件已移动
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
文件已移动
文件已移动
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
文件已移动
文件已移动
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/renesas/tools/sdk_dist.py
0 → 100644
此差异已折叠。