Merge pull request #23264 from AleksandrPanov:add_detect_qr_with_aruco
Add detect qr with aruco #23264 Using Aruco to detect finder patterns to search QR codes. TODO (in next PR): - add single QR detect (update `detect()` and `detectAndDecode()`) - need reduce full enumeration of finder patterns - need add finder pattern info to `decode` step - need to merge the pipeline of the old and new algorithm [Current results:](https://docs.google.com/spreadsheets/d/1ufKyR-Zs-IGXwvqPgftssmTlceVjiQX364sbrjr2QU8/edit#gid=1192415584) +20% total detect, +8% total decode in OpenCV [QR benchmark](https://github.com/opencv/opencv_benchmarks/tree/develop/python_benchmarks/qr_codes) 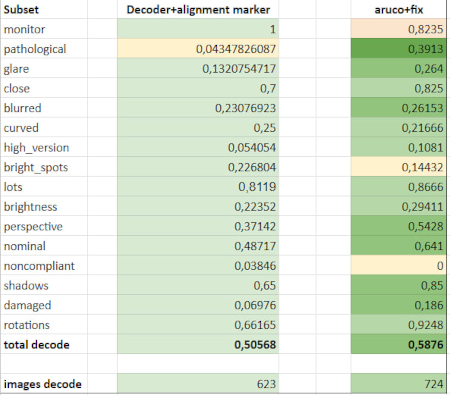 78.4% detect, 58.7% decode vs 58.5 detect, 50.5% decode in default [main.py.txt](https://github.com/opencv/opencv/files/10762369/main.py.txt) 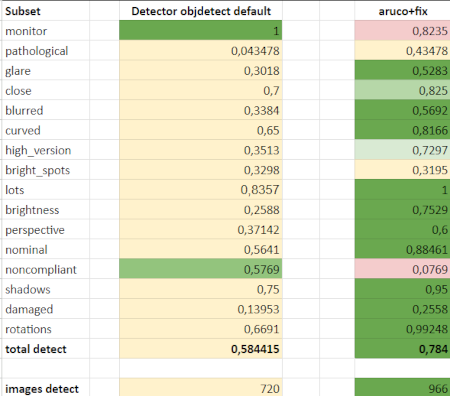 add new info to [google docs](https://docs.google.com/spreadsheets/d/1ufKyR-Zs-IGXwvqPgftssmTlceVjiQX364sbrjr2QU8/edit?usp=sharing) ### Pull Request Readiness Checklist See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request - [x] I agree to contribute to the project under Apache 2 License. - [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV - [x] The PR is proposed to the proper branch - [x] There is a reference to the original bug report and related work - [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable Patch to opencv_extra has the same branch name. - [ ] The feature is well documented and sample code can be built with the project CMake
Showing
想要评论请 注册 或 登录