Merge pull request #2 from RT-Thread/master
update
Showing
bsp/smartfusion2/CMSIS/SConscript
0 → 100644
bsp/smartfusion2/CMSIS/core_cm3.c
0 → 100644
此差异已折叠。
bsp/smartfusion2/CMSIS/core_cm3.h
0 → 100644
此差异已折叠。
bsp/smartfusion2/CMSIS/m2sxxx.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/smartfusion2/Kconfig
0 → 100644
此差异已折叠。
bsp/smartfusion2/README.md
0 → 100644
此差异已折叠。
bsp/smartfusion2/SConscript
0 → 100644
bsp/smartfusion2/SConstruct
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/smartfusion2/board/SConscript
0 → 100644
此差异已折叠。
bsp/smartfusion2/board/board.c
0 → 100644
此差异已折叠。
bsp/smartfusion2/board/config.c
0 → 100644
此差异已折叠。
bsp/smartfusion2/board/config.h
0 → 100644
此差异已折叠。
bsp/smartfusion2/drivers/Kconfig
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
{kind=link}
1006.8 KB
{kind=link}
581.0 KB
{kind=link}
157.8 KB
{kind=link}
154.4 KB
{kind=link}
151.7 KB
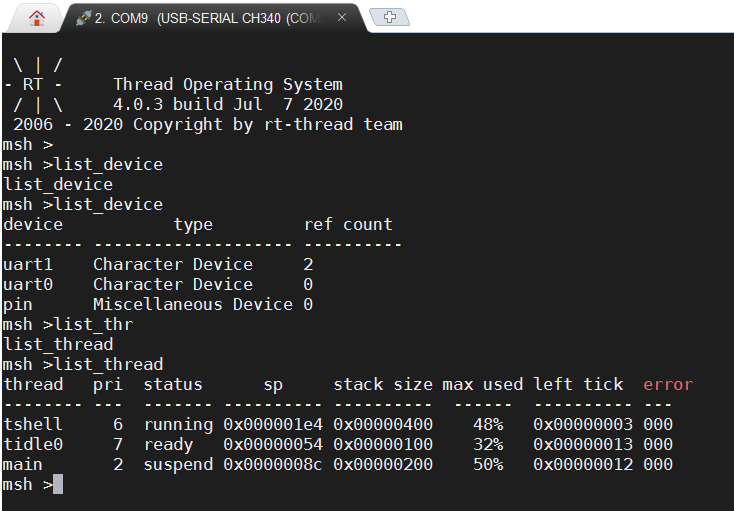
bsp/smartfusion2/figures/log.jpg
0 → 100644
{kind=link}
259.7 KB
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/smartfusion2/project.uvopt
0 → 100644
此差异已折叠。
bsp/smartfusion2/project.uvoptx
0 → 100644
此差异已折叠。
bsp/smartfusion2/project.uvproj
0 → 100644
此差异已折叠。
bsp/smartfusion2/project.uvprojx
0 → 100644
此差异已折叠。
bsp/smartfusion2/rtconfig.h
0 → 100644
此差异已折叠。
bsp/smartfusion2/rtconfig.py
0 → 100644
此差异已折叠。
bsp/smartfusion2/template.uvopt
0 → 100644
此差异已折叠。
bsp/smartfusion2/template.uvoptx
0 → 100644
此差异已折叠。
bsp/smartfusion2/template.uvproj
0 → 100644
此差异已折叠。
bsp/smartfusion2/template.uvprojx
0 → 100644
此差异已折叠。
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
components/drivers/phy/SConscript
0 → 100644
此差异已折叠。
components/drivers/phy/phy.c
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。