
1.Modify project directory structure
2.Add support for GPIO and UART peripherals 3.Add pin and serial device driver support 4.Put pictures in local folder 5.Modify README file
Showing
文件已移动
文件已移动
文件已移动
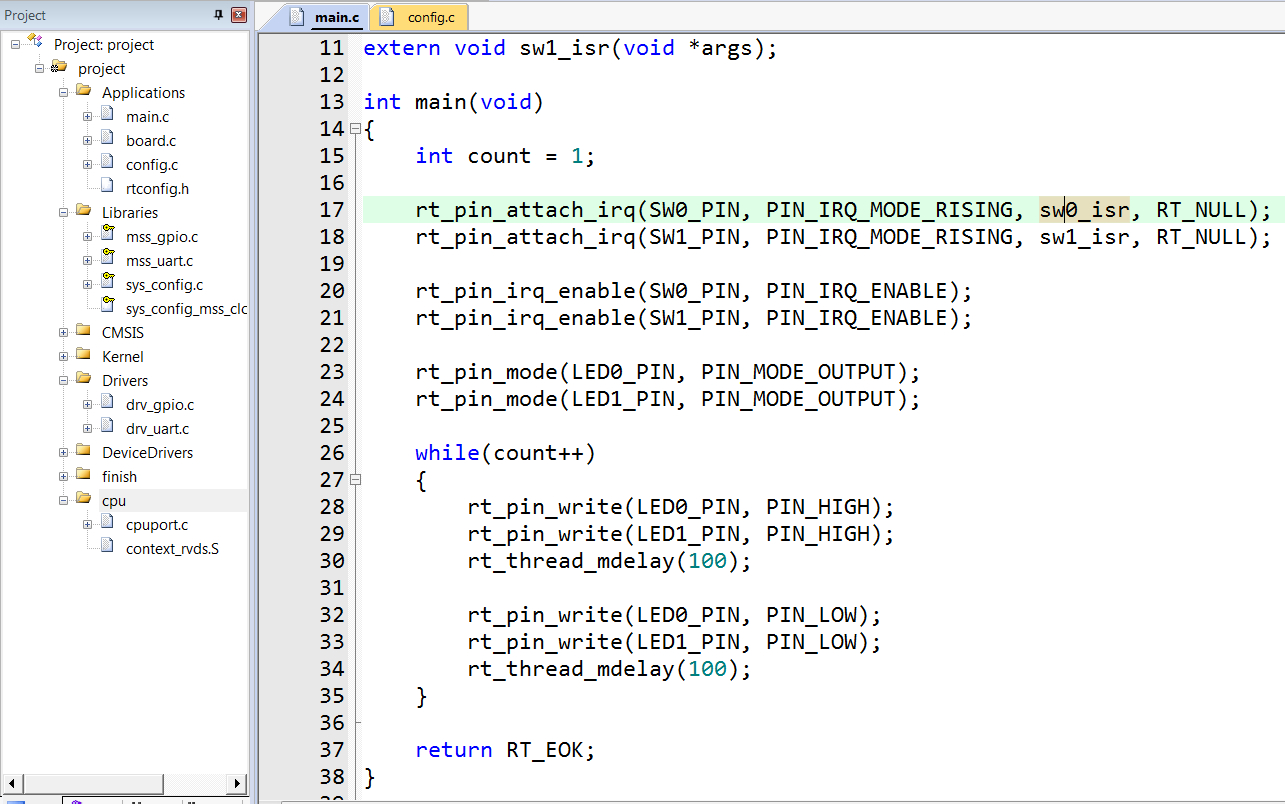
bsp/smartfusion2/board/config.c
0 → 100644
{kind=link}
1006.8 KB
{kind=link}
581.0 KB
{kind=link}
157.8 KB
{kind=link}
154.4 KB
{kind=link}
151.7 KB
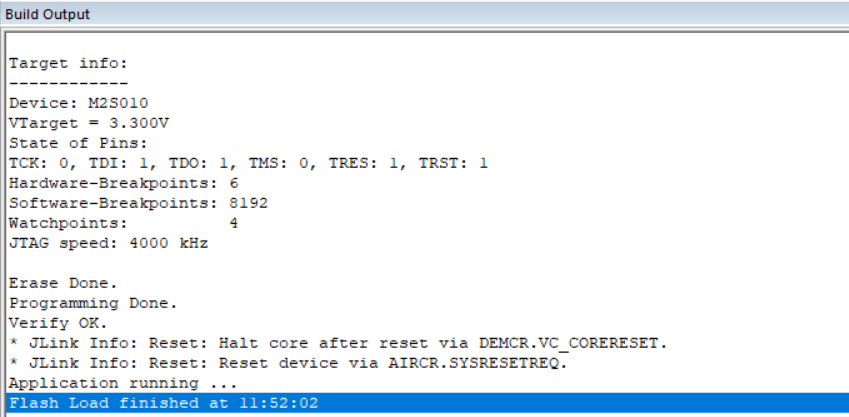
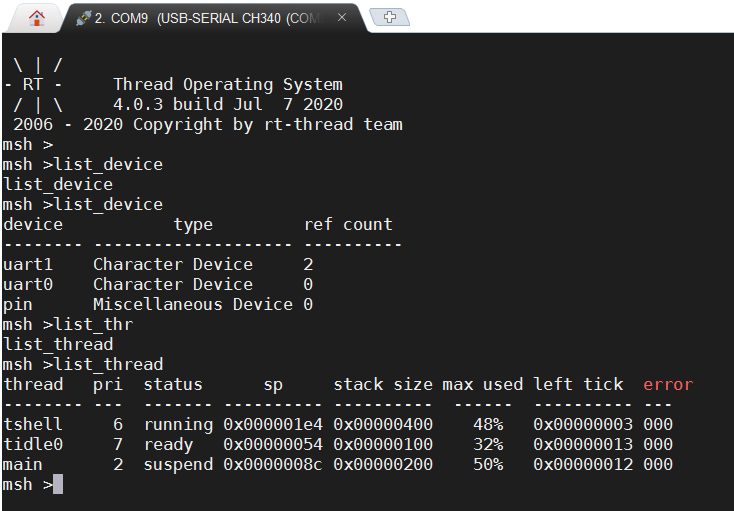
bsp/smartfusion2/figures/log.jpg
0 → 100644
{kind=link}
259.7 KB
{kind=link}
491.9 KB
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/smartfusion2/rtconfig.h
0 → 100644
bsp/smartfusion2/rtconfig.py
0 → 100644
此差异已折叠。
bsp/smartfusion2/user/main.c
已删除
100644 → 0
此差异已折叠。
此差异已折叠。