Description: Update docs quickstart
Reviewed: Duanxichao
Showing
此差异已折叠。
docs-en/quick-start/faqs-1.md
0 → 100644
docs-en/quick-start/faqs-3.md
0 → 100644
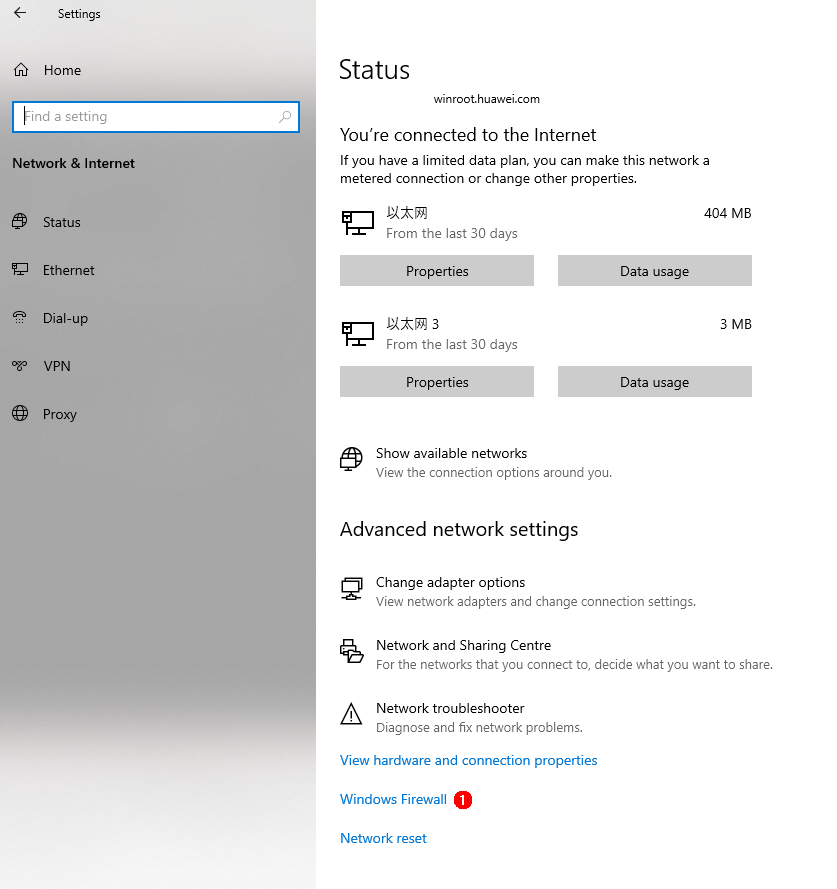
docs-en/quick-start/figures/3.png
0 → 100644
{kind=link}
69.2 KB
{kind=link}
201.2 KB
{kind=link}
392.7 KB
{kind=link}
337.6 KB
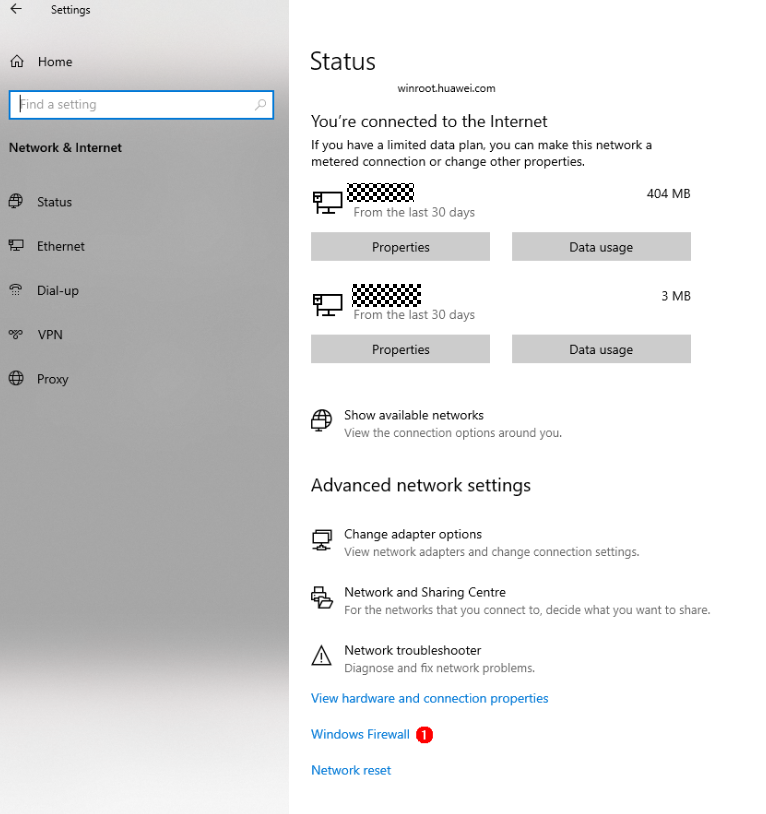
docs-en/quick-start/figures/4.png
0 → 100644
{kind=link}
74.9 KB
{kind=link}
59.6 KB
{kind=link}
37.9 KB
{kind=link}
16.2 KB
{kind=link}

252 字节
{kind=link}
24.4 KB
{kind=link}
44.6 KB
{kind=link}

252 字节
{kind=link}
24.6 KB
{kind=link}
5.1 KB
{kind=link}
18.0 KB
{kind=link}
19.9 KB
{kind=link}
17.3 KB
{kind=link}
23.8 KB
{kind=link}
17.3 KB
{kind=link}
10.8 KB
{kind=link}

4.1 KB
{kind=link}

7.3 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
60.1 KB
{kind=link}
4.8 KB
{kind=link}
65.1 KB
{kind=link}
13.3 KB
{kind=link}
14.9 KB
{kind=link}
4.9 KB
此差异已折叠。
此差异已折叠。
quick-start/figures/3.png
0 → 100644
{kind=link}
69.2 KB
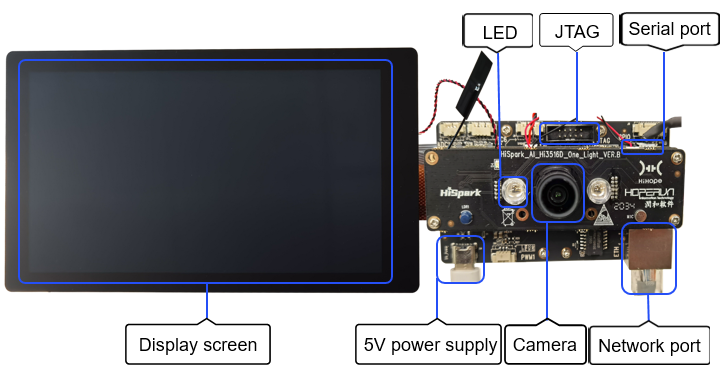
quick-start/figures/3516正面.png
0 → 100644
{kind=link}
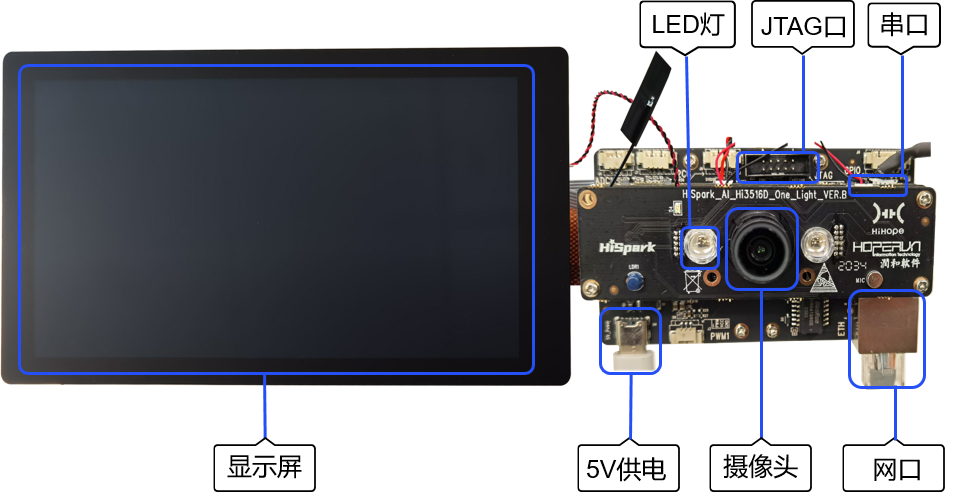
411.0 KB
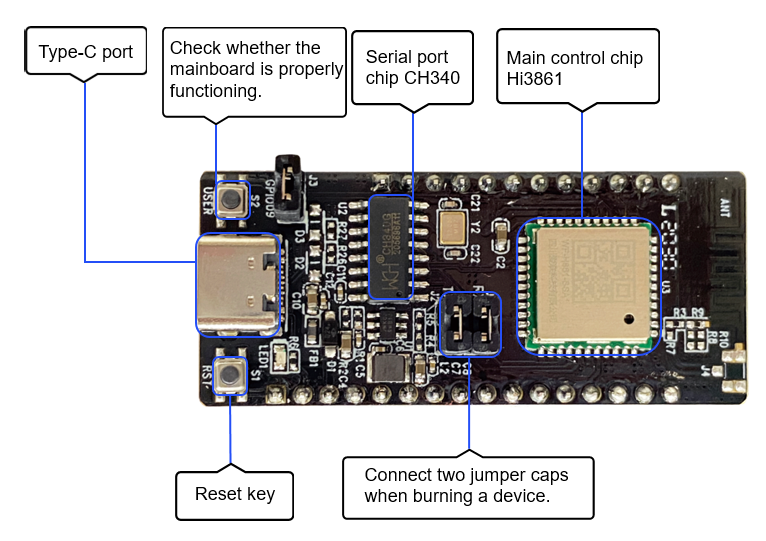
quick-start/figures/3861正面.png
0 → 100644
{kind=link}
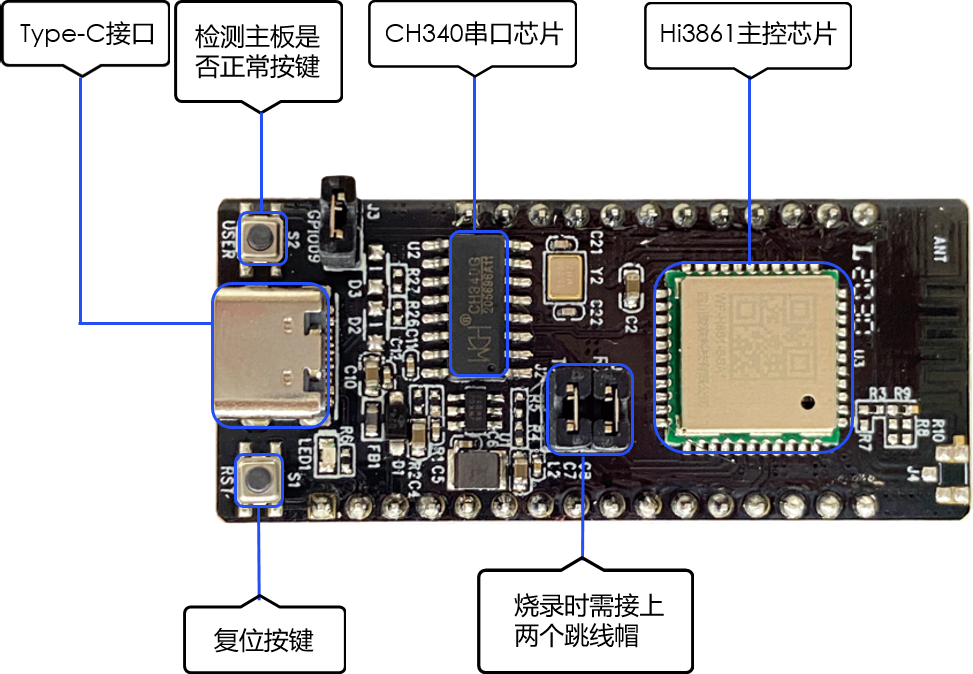
743.2 KB
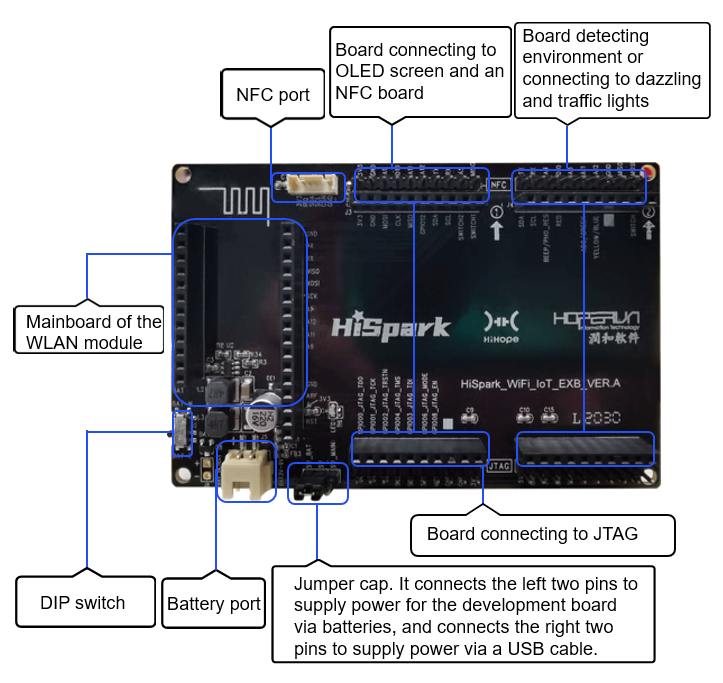
quick-start/figures/3861背面.png
0 → 100644
{kind=link}
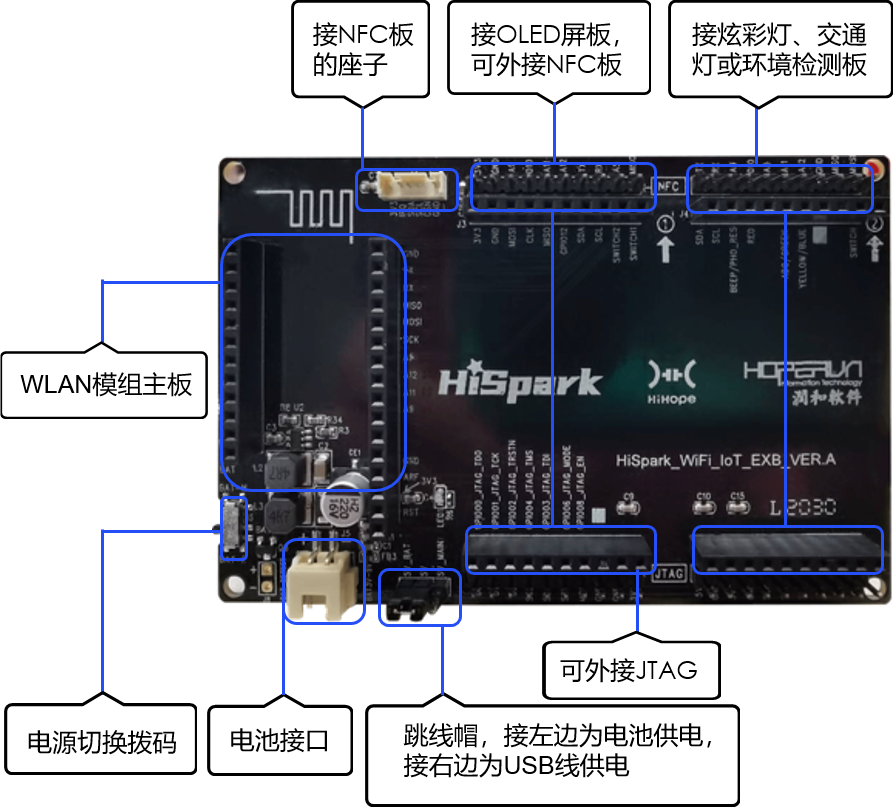
638.3 KB
quick-start/figures/4.png
0 → 100644
{kind=link}
74.9 KB
{kind=link}
4.8 KB
{kind=link}
4.8 KB
quick-start/figures/USB烧录-6.png
0 → 100644
{kind=link}
13.3 KB
{kind=link}
59.6 KB
{kind=link}
37.9 KB
{kind=link}
16.2 KB
{kind=link}

252 字节
{kind=link}
24.4 KB
{kind=link}
44.6 KB
{kind=link}

252 字节
{kind=link}
24.6 KB
{kind=link}
5.1 KB
{kind=link}
18.0 KB
{kind=link}
19.9 KB
{kind=link}
17.3 KB
{kind=link}
23.8 KB
{kind=link}
17.3 KB
{kind=link}
10.8 KB
{kind=link}

4.1 KB
{kind=link}

7.3 KB
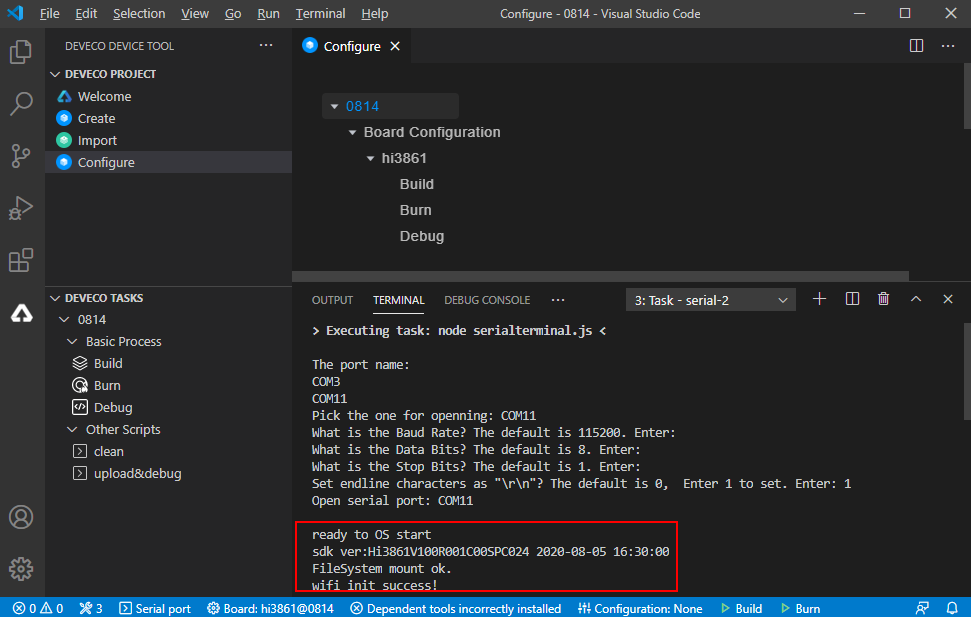
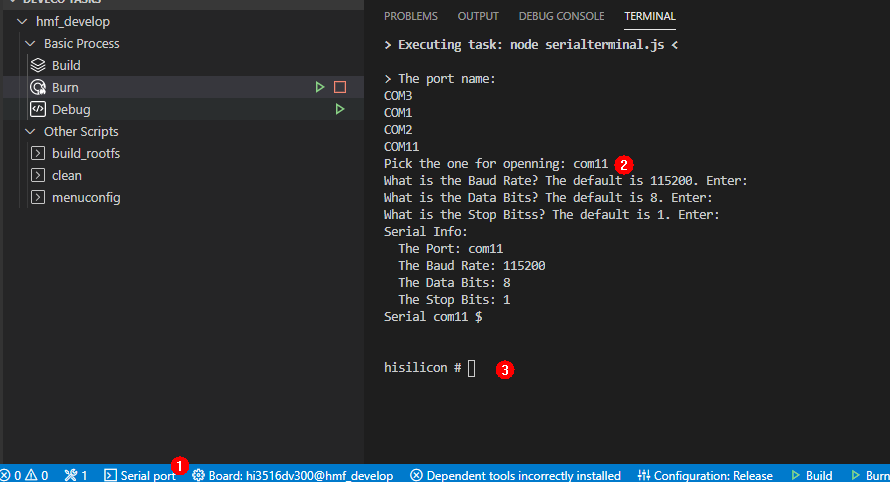
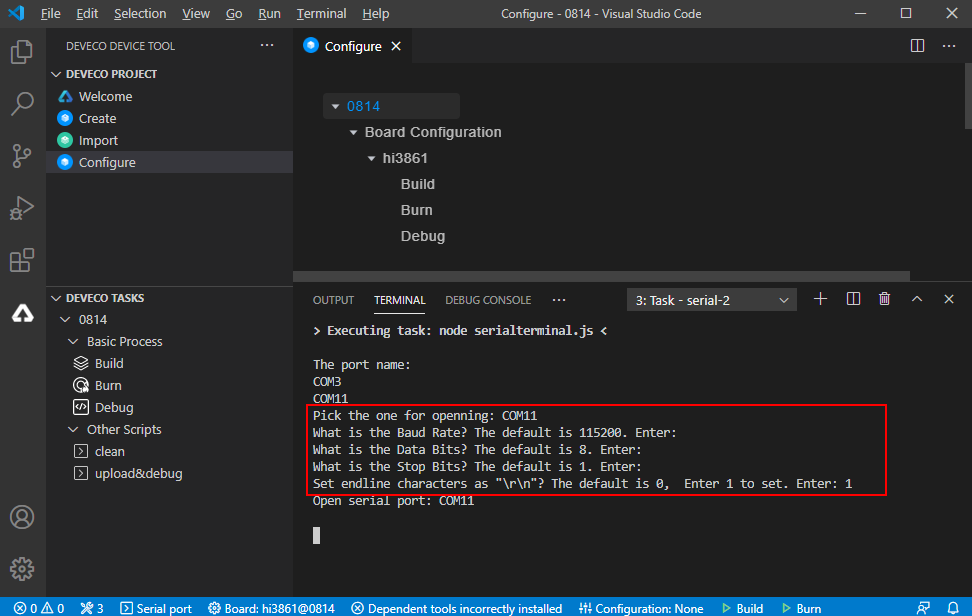
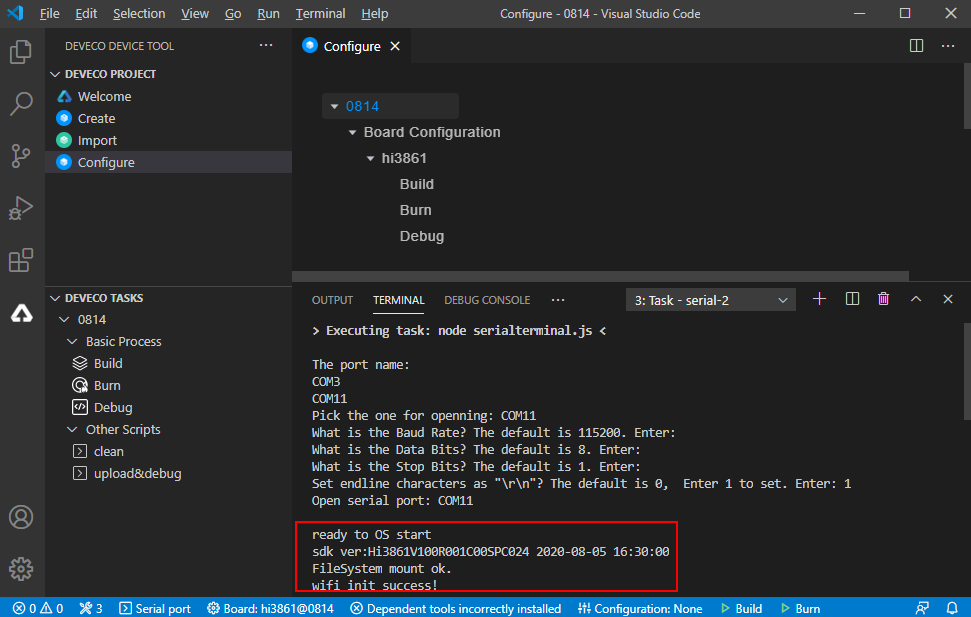
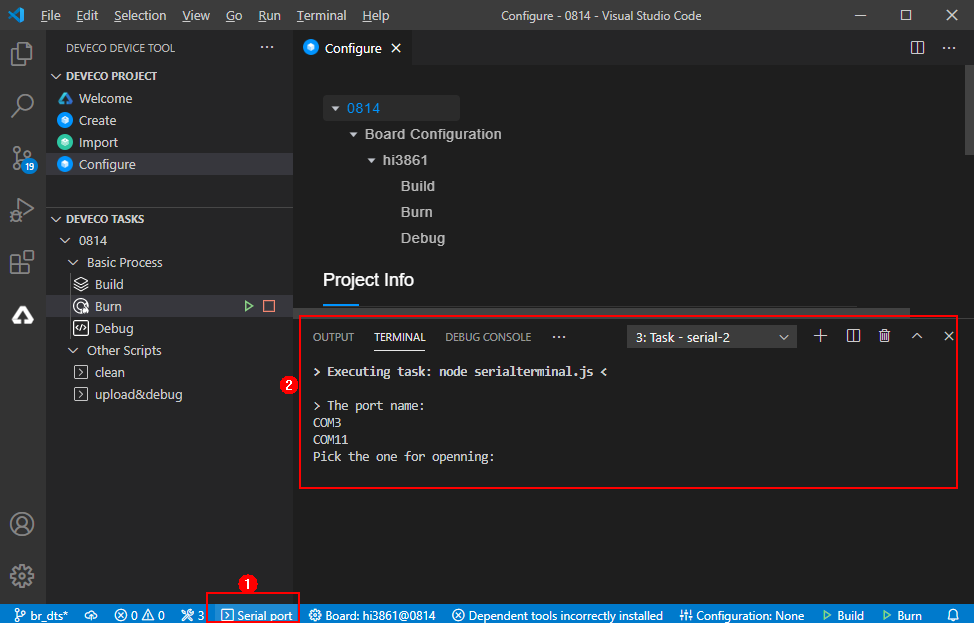
quick-start/figures/串口参数配置示意图.png
0 → 100644
{kind=link}
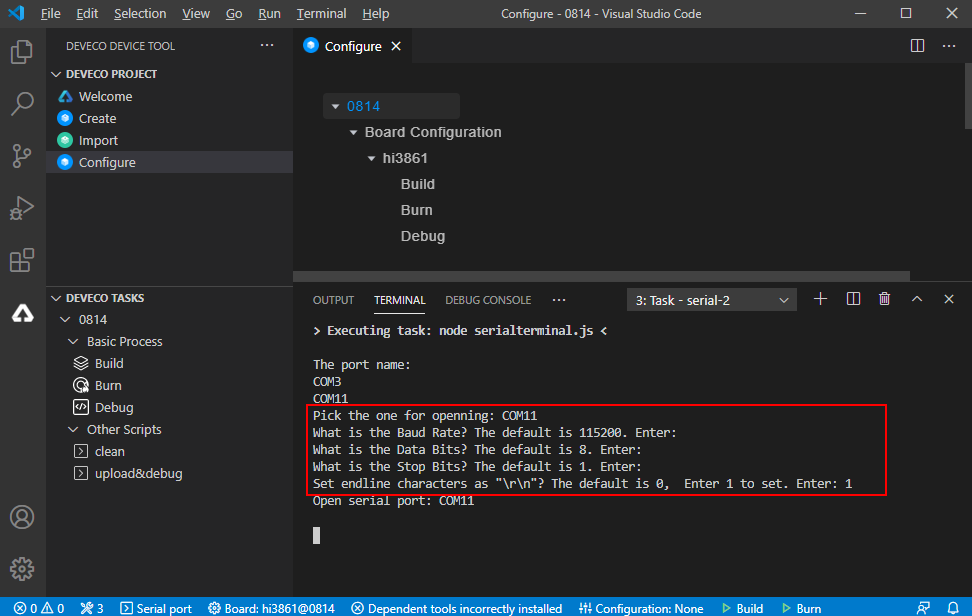
65.1 KB
{kind=link}
60.1 KB
quick-start/figures/矩形备份-292.png
0 → 100644
{kind=link}
14.9 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
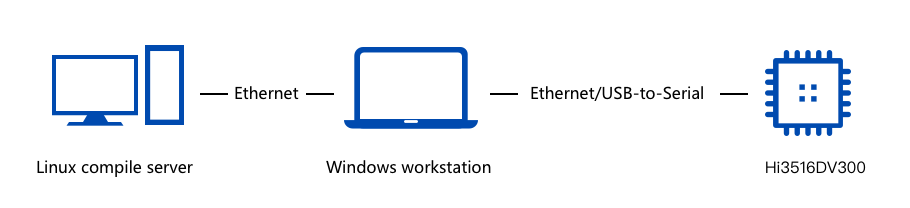
quick-start/figures/网口烧录-1.png
0 → 100644
{kind=link}
4.9 KB