Merge pull request #5262 from ShermanShao/master
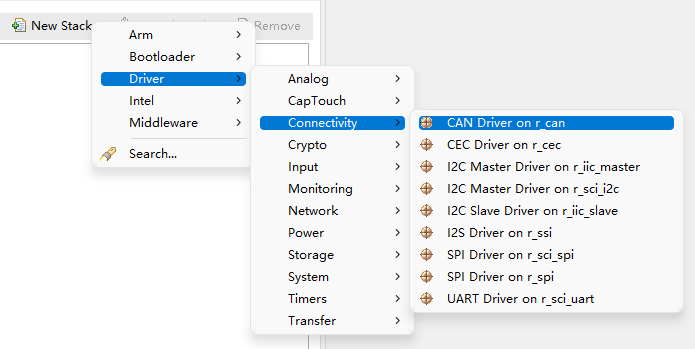
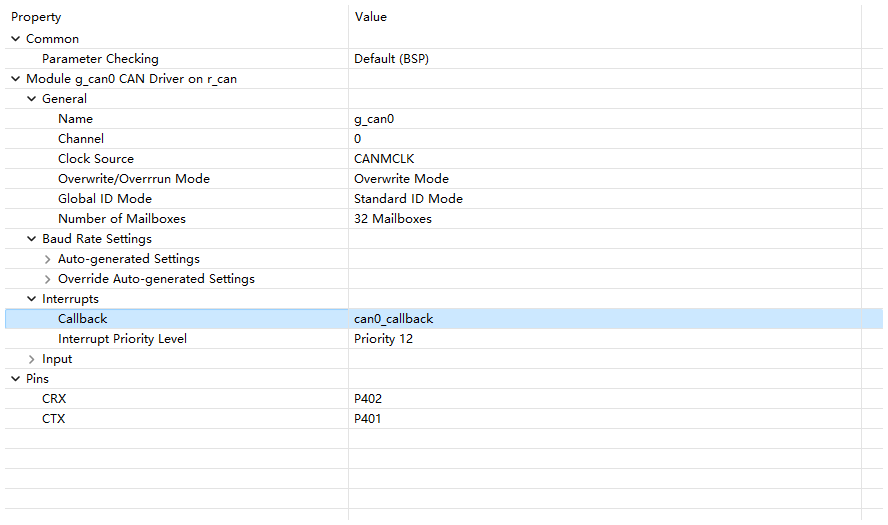
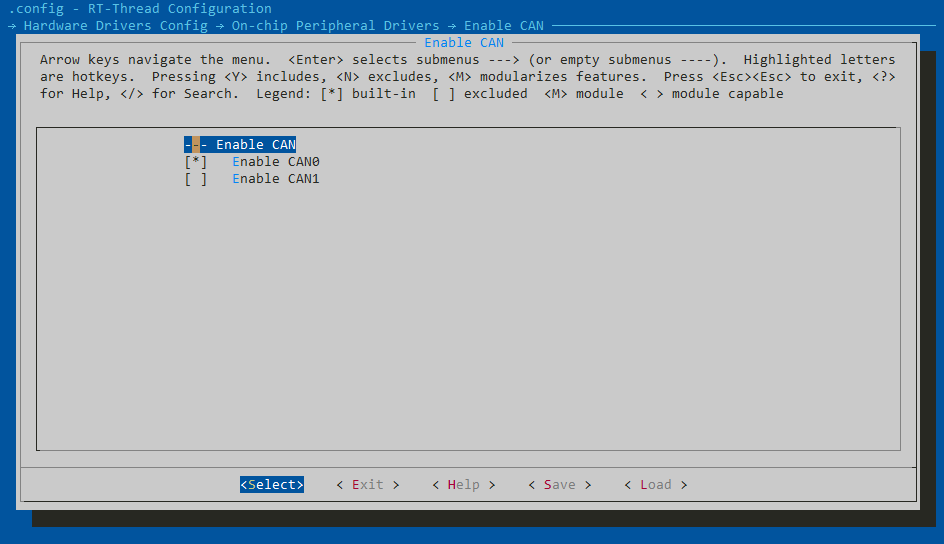
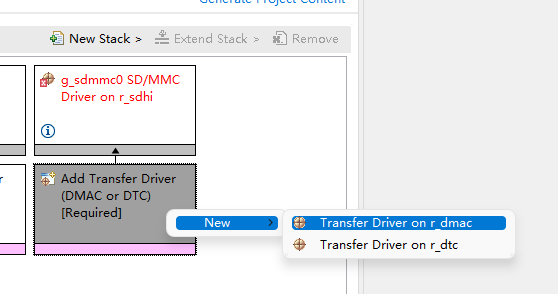
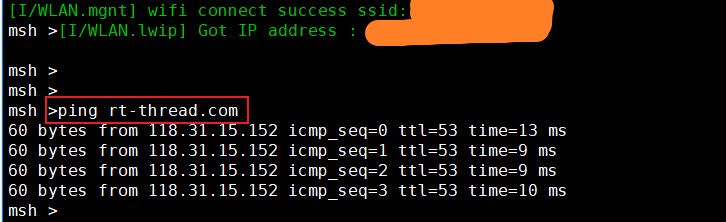
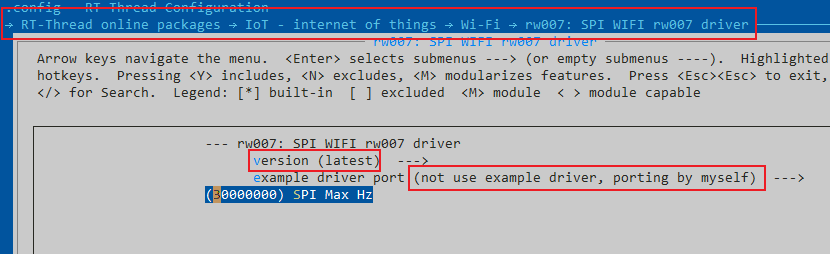
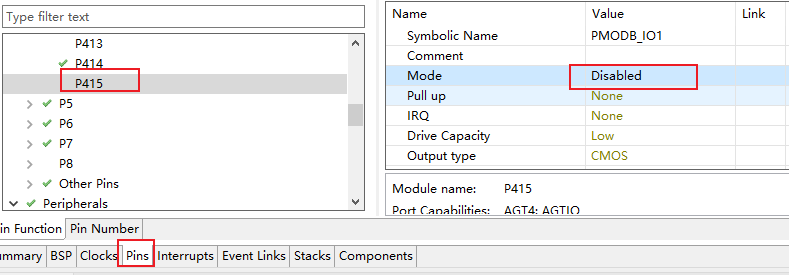
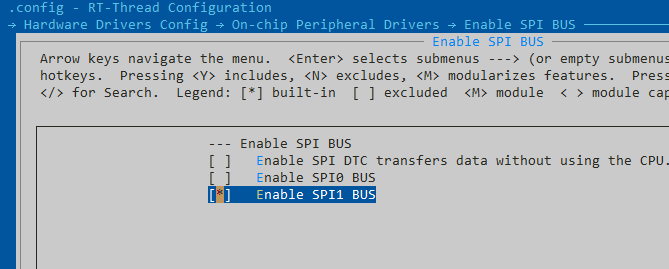
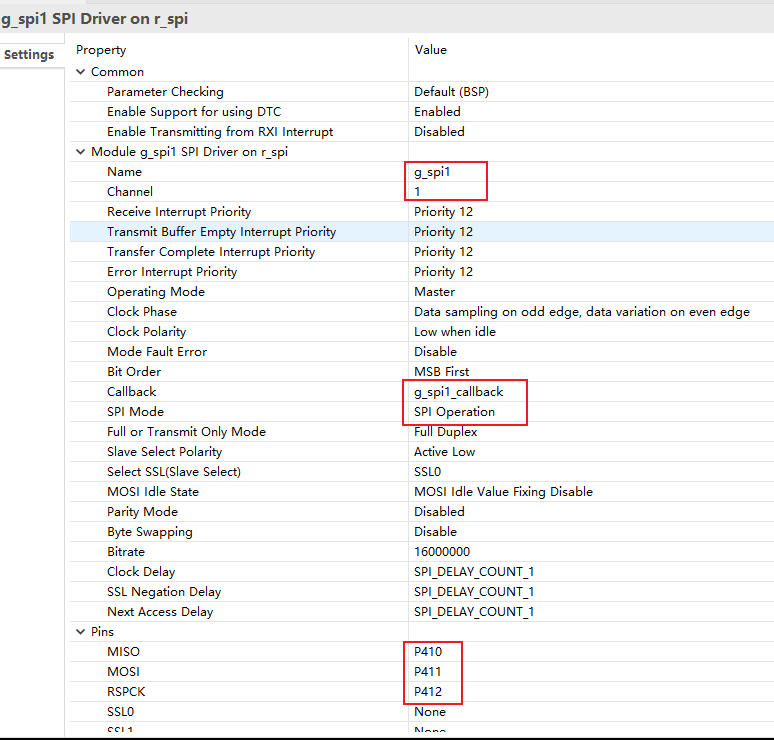
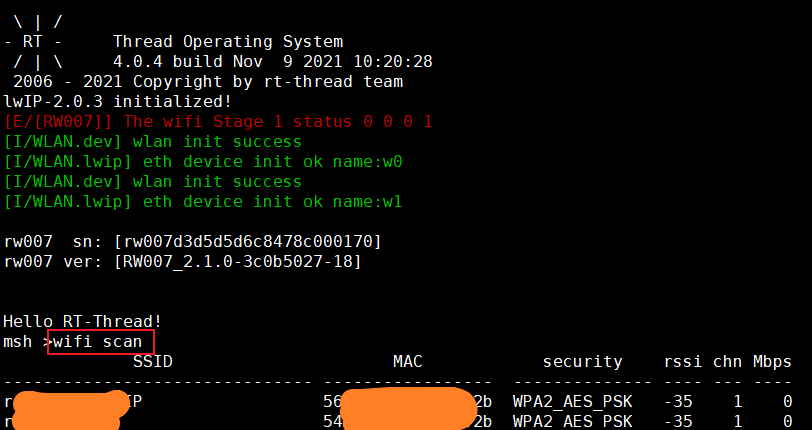
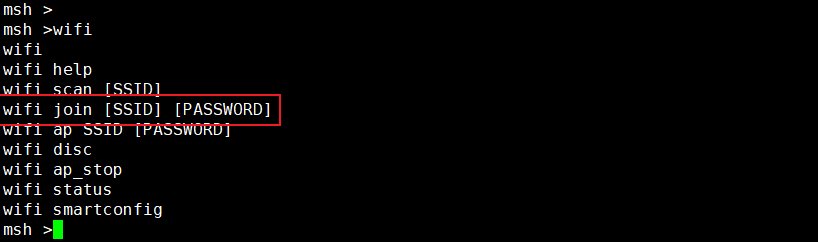
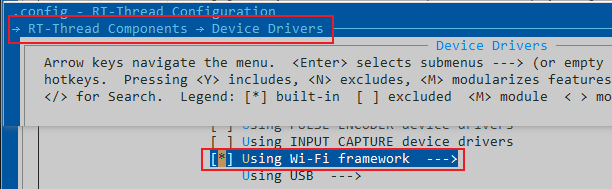
[BSP/RA6M4-CPK] 添加 CAN、RW007 的支持
Showing
bsp/ra6m4-cpk/.gitignore
0 → 100644
{kind=link}
27.8 KB
{kind=link}
21.1 KB
{kind=link}
22.2 KB
{kind=link}
17.4 KB
{kind=link}
31.4 KB
{kind=link}
25.2 KB
{kind=link}
13.4 KB
{kind=link}
19.0 KB
{kind=link}
16.2 KB
{kind=link}
26.0 KB
{kind=link}
11.5 KB
{kind=link}
20.7 KB
{kind=link}
17.8 KB
{kind=link}
20.4 KB
{kind=link}
19.5 KB
{kind=link}
17.6 KB
{kind=link}
39.7 KB
{kind=link}
29.6 KB
{kind=link}
11.2 KB
{kind=link}
17.5 KB
{kind=link}
31.9 KB
{kind=link}
29.9 KB
{kind=link}
28.2 KB
{kind=link}
25.8 KB
bsp/ra6m4-cpk/drivers/drv_can.c
0 → 100644
bsp/ra6m4-cpk/drivers/drv_can.h
0 → 100644