update cluster design
Showing
{kind=link}
文件已移动
{kind=link}
33.1 KB
文件已移动
{kind=link}
文件已移动
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
文件已移动
文件已移动
{kind=link}
文件已移动
文件已移动
{kind=link}
文件已移动
文件已添加
{kind=link}
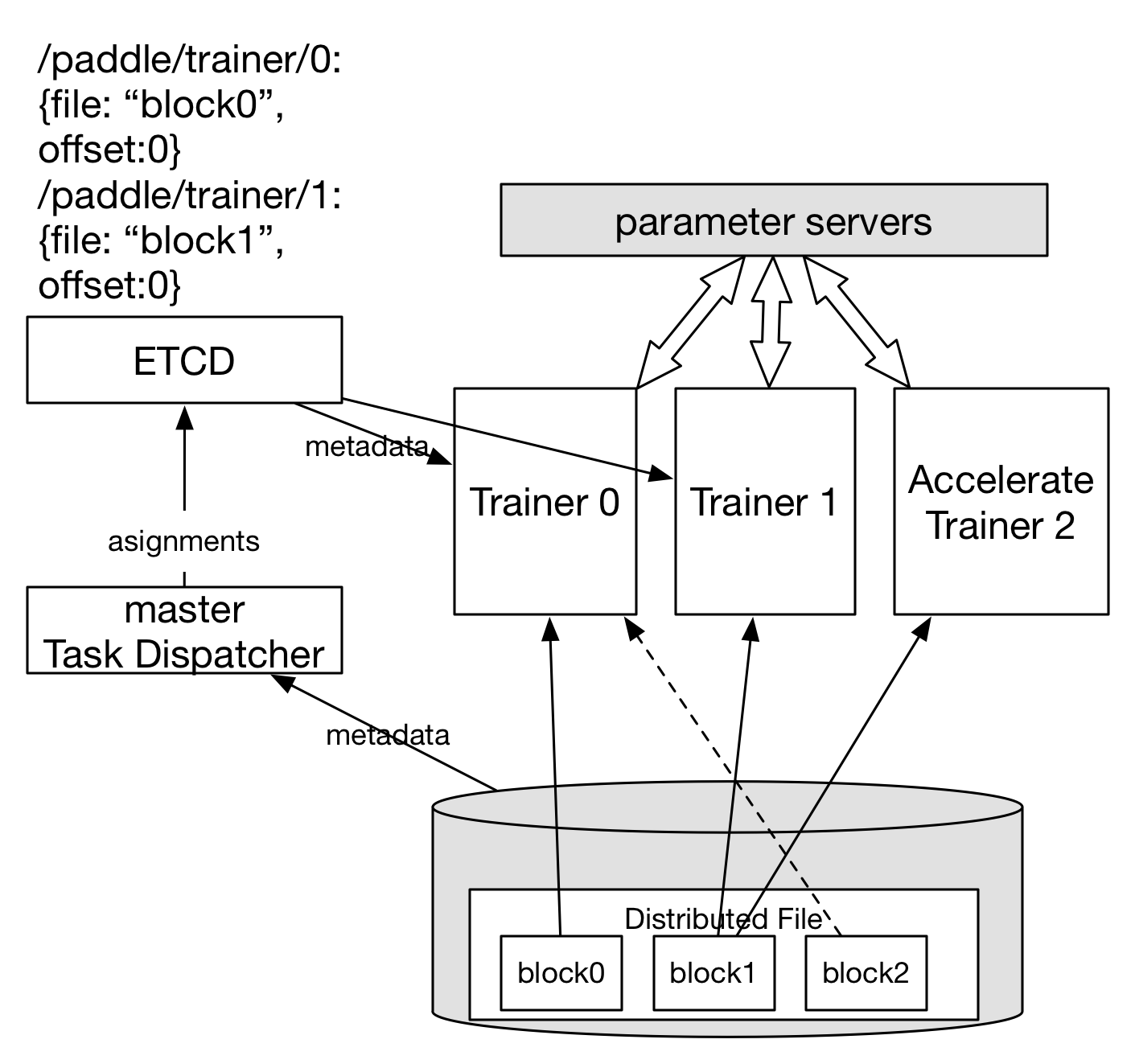
doc/design/images/master.png
已删除
100644 → 0
{kind=link}
162.2 KB
文件已删除
{kind=link}
134.9 KB