update code
Showing
{kind=link}
15.1 KB
{kind=link}
15.6 KB
{kind=link}
14.1 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
13.7 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
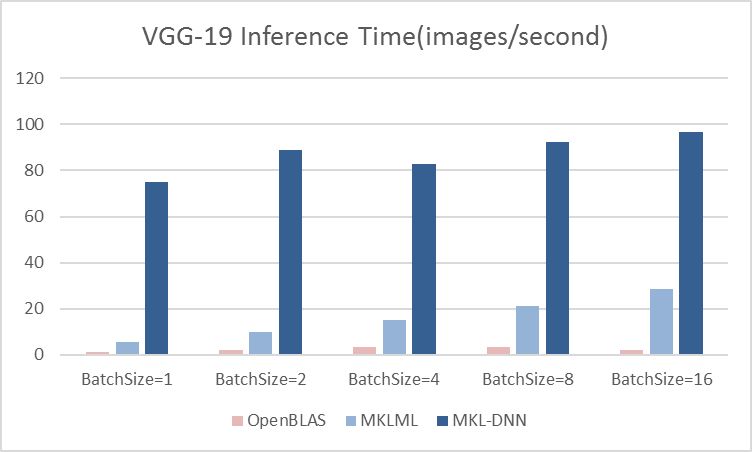
benchmark/figs/vgg-cpu-infer.png
0 → 100644
{kind=link}
13.7 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
doc/design/backward.md
0 → 100644
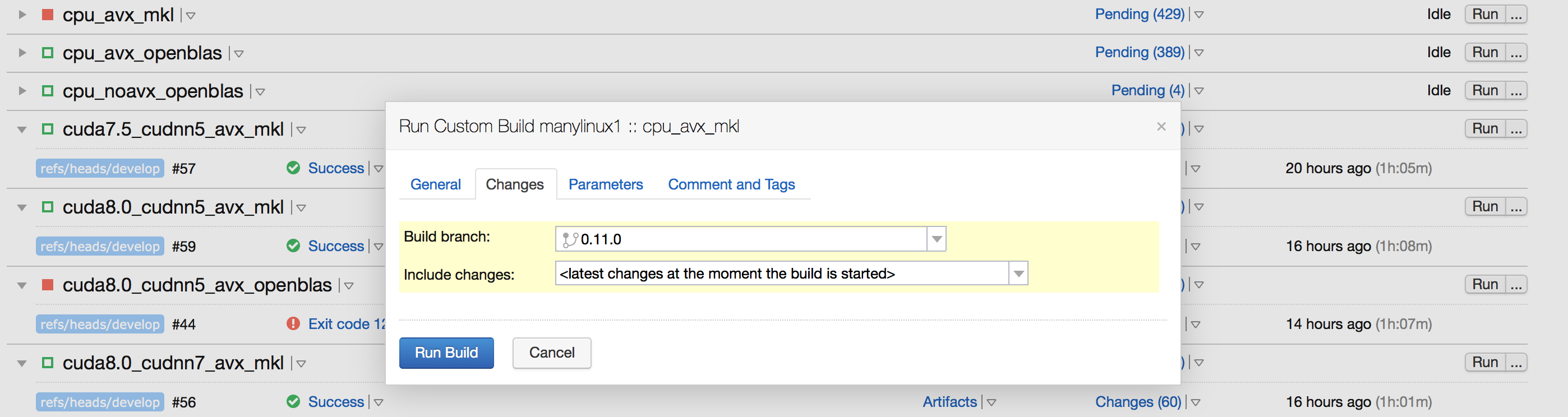
doc/design/ci_build_whl.png
0 → 100644
{kind=link}
280.4 KB
文件已移动
{kind=link}
文件已移动
文件已移动
{kind=link}
文件已移动
{kind=link}
189.2 KB
文件已移动
{kind=link}
文件已移动
文件已添加
{kind=link}
102.5 KB
文件已添加
{kind=link}
350.4 KB
{kind=link}
76.3 KB
文件已移动
{kind=link}
文件已移动
文件已添加
{kind=link}
134.5 KB
doc/design/error_clip.md
0 → 100644
doc/design/fluid-compiler.graffle
0 → 100644
文件已添加
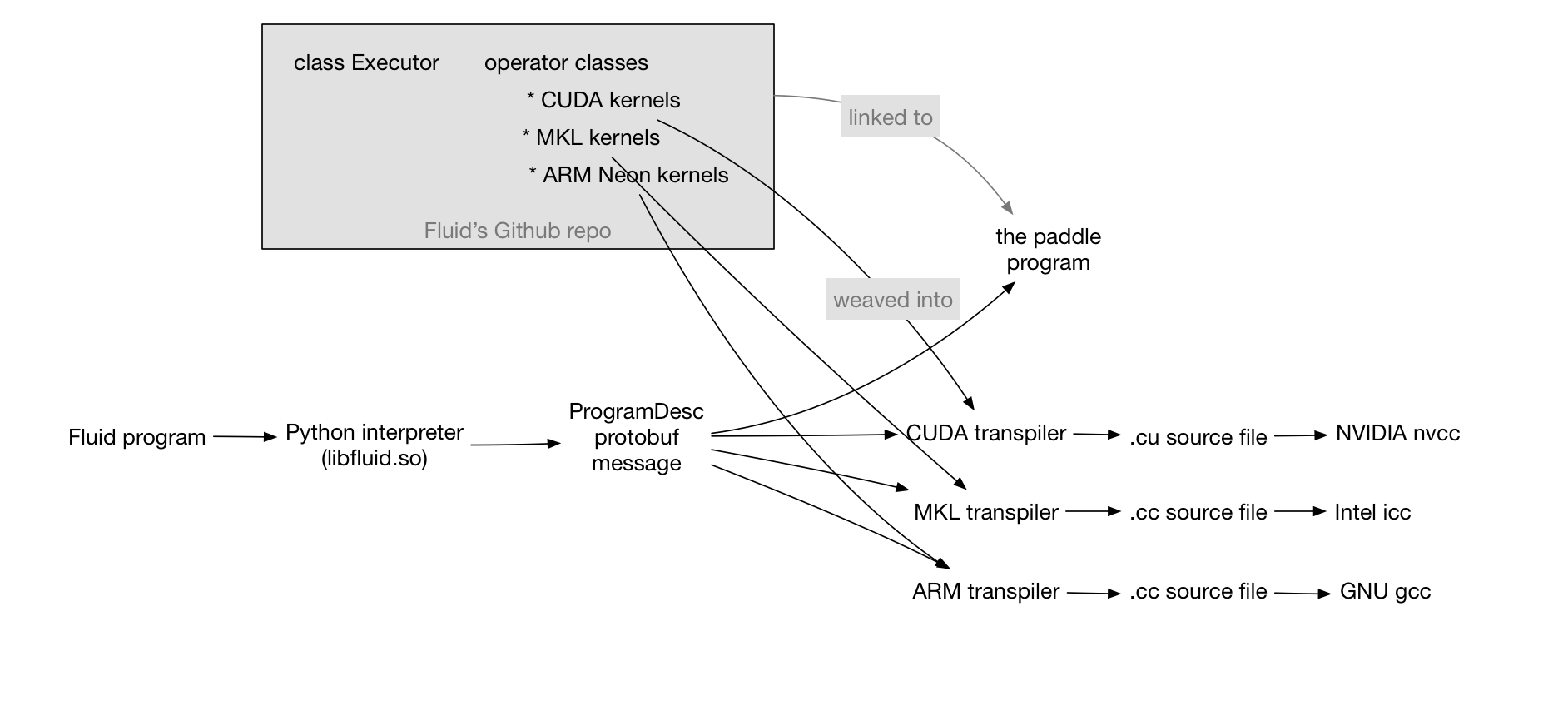
doc/design/fluid-compiler.png
0 → 100644
{kind=link}
121.2 KB
doc/design/fluid.md
0 → 100644
{kind=link}
83.3 KB
{kind=link}
22.5 KB
{kind=link}
39.7 KB
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
文件已添加
{kind=link}
108.4 KB
文件已添加
{kind=link}
32.8 KB
doc/design/images/profiler.png
0 → 100644
{kind=link}
49.9 KB
doc/design/kernel_hint_design.md
0 → 100644
doc/design/memory_optimization.md
0 → 100644
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
doc/design/mkl/mkl_packed.md
0 → 100644
doc/design/mkl/mkldnn_fluid.md
0 → 100644
doc/design/paddle_nccl.md
0 → 100644
doc/design/profiler.md
0 → 100644
{kind=link}
46.5 KB
文件已删除
{kind=link}
28.3 KB
doc/design/support_new_device.md
0 → 100644
doc/design/switch_kernel.md
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
此差异已折叠。
文件已移动
文件已移动
文件已移动
此差异已折叠。
文件已移动
文件已移动
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
此差异已折叠。
{kind=link}
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/framework/backward.md
已删除
100644 → 0
此差异已折叠。
paddle/framework/data_layout.h
0 → 100644
此差异已折叠。
此差异已折叠。
paddle/framework/data_transform.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/framework/init.cc
0 → 100644
此差异已折叠。
paddle/framework/init.h
0 → 100644
此差异已折叠。
paddle/framework/init_test.cc
0 → 100644
此差异已折叠。
paddle/framework/library_type.h
0 → 100644
此差异已折叠。
paddle/framework/op_kernel_type.h
0 → 100644
此差异已折叠。
此差异已折叠。
paddle/framework/tensor_util.cc
0 → 100644
此差异已折叠。
paddle/framework/tensor_util.cu
0 → 120000
此差异已折叠。
此差异已折叠。
paddle/framework/threadpool.cc
0 → 100644
此差异已折叠。
paddle/framework/threadpool.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/inference/CMakeLists.txt
0 → 100644
此差异已折叠。
paddle/inference/example.cc
0 → 100644
此差异已折叠。
paddle/inference/inference.cc
0 → 100644
此差异已折叠。
paddle/inference/inference.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/operators/get_places_op.cc
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/operators/norm_op.cc
0 → 100644
此差异已折叠。
paddle/operators/norm_op.cu
0 → 100644
此差异已折叠。
paddle/operators/norm_op.h
0 → 100644
此差异已折叠。
文件已移动
此差异已折叠。
文件已移动
此差异已折叠。
文件已移动
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/operators/spp_op.cc
0 → 100644
此差异已折叠。
paddle/operators/spp_op.cu.cc
0 → 100644
此差异已折叠。
paddle/operators/spp_op.h
0 → 100644
此差异已折叠。
paddle/operators/tensor.save
已删除
100644 → 0
此差异已折叠。
paddle/operators/warpctc_op.cc
0 → 100644
此差异已折叠。
paddle/operators/warpctc_op.cu.cc
0 → 100644
此差异已折叠。
paddle/operators/warpctc_op.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/platform/dynload/warpctc.h
0 → 100644
此差异已折叠。
paddle/platform/for_range.h
0 → 100644
此差异已折叠。
paddle/platform/mkldnn_helper.h
0 → 100644
此差异已折叠。
paddle/platform/profiler.cc
0 → 100644
此差异已折叠。
paddle/platform/profiler.h
0 → 100644
此差异已折叠。
paddle/platform/profiler_test.cc
0 → 100644
此差异已折叠。
paddle/pybind/const_value.cc
0 → 100644
此差异已折叠。
paddle/pybind/const_value.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
python/paddle/v2/fluid/clip.py
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。