feat(tools): add assignment visualizer (#1616)
feat(tools): add assignment visualizer (#1616)
Showing
assets/assignment.png
0 → 100644
{kind=link}
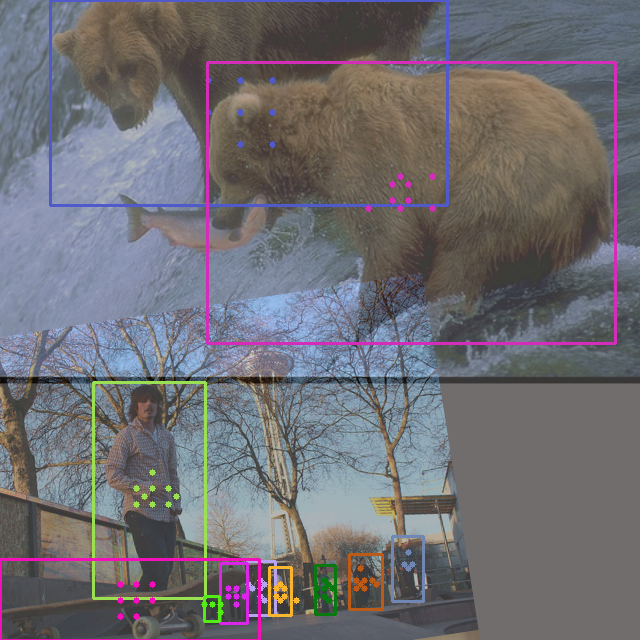
650.2 KB
docs/assignment_visualization.md
0 → 100644
tools/visualize_assign.py
0 → 100644