Update the annotation of layers.py
Showing
doc/design/block.md
0 → 100644
{kind=link}
51.4 KB
doc/design/ops/images/rnn.dot
0 → 100644
doc/design/ops/images/rnn.jpg
0 → 100644
{kind=link}
43.3 KB
doc/design/ops/images/rnn.png
0 → 100644
{kind=link}
180.8 KB
{kind=link}
67.3 KB
doc/design/ops/rnn.md
0 → 100644
{kind=link}
{kind=link}
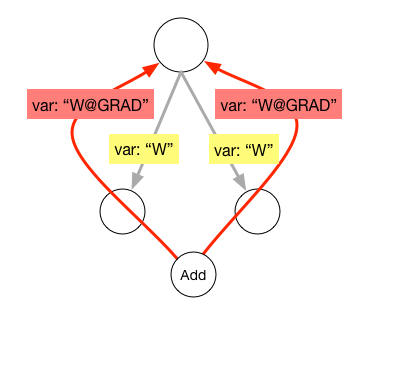
| W: | H:
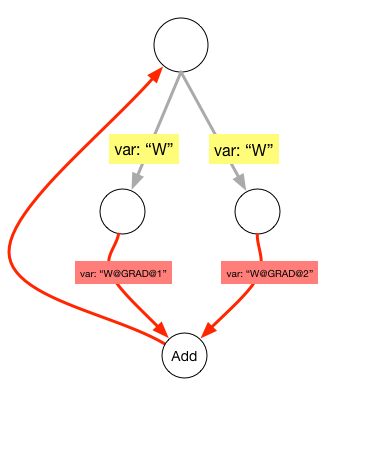
| W: | H:
paddle/operators/accuracy_op.cc
0 → 100644
paddle/operators/accuracy_op.cu
0 → 100644
paddle/operators/accuracy_op.h
0 → 100644
paddle/operators/concat_op.cu
已删除
100644 → 0
paddle/operators/cond_op.cc
0 → 100644
paddle/operators/cond_op.h
0 → 100644
paddle/operators/fc_op.cc
0 → 100644
文件已移动
文件已移动
paddle/operators/pad_op.cc
0 → 100644
此差异已折叠。
paddle/operators/pad_op.cu
0 → 100644
paddle/operators/pad_op.h
0 → 100644
此差异已折叠。
paddle/operators/reshape_op.cc
0 → 100644
此差异已折叠。
paddle/operators/reshape_op.cu
0 → 100644
此差异已折叠。
paddle/operators/reshape_op.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
paddle/platform/transform.h
0 → 100644
此差异已折叠。
paddle/platform/transform_test.cu
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
文件已移动
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
文件已移动
文件已移动
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。