bsp/nuclei: Add more drivers support for gd32vf103_rvstar board
Squashed commit of the following:
commit 32dd349ccff85cdcad81021b5185f8f7347786db
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 16:08:08 2020 +0800
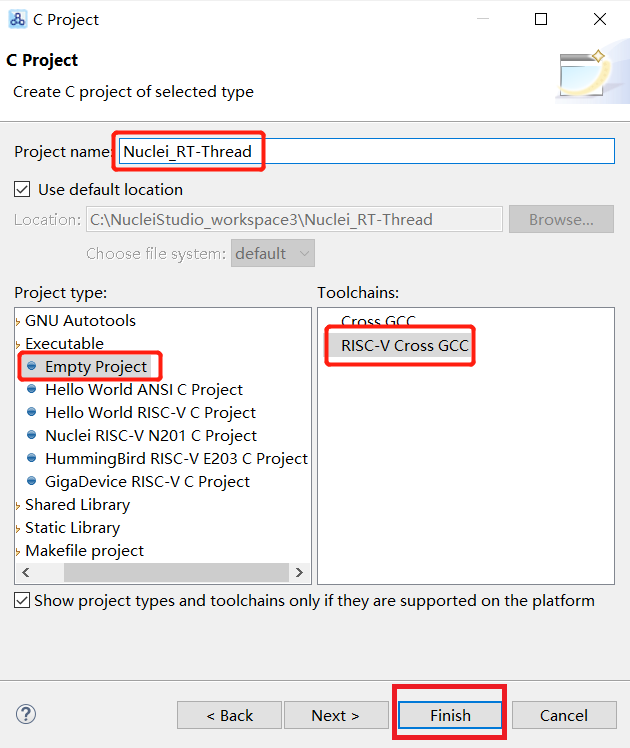
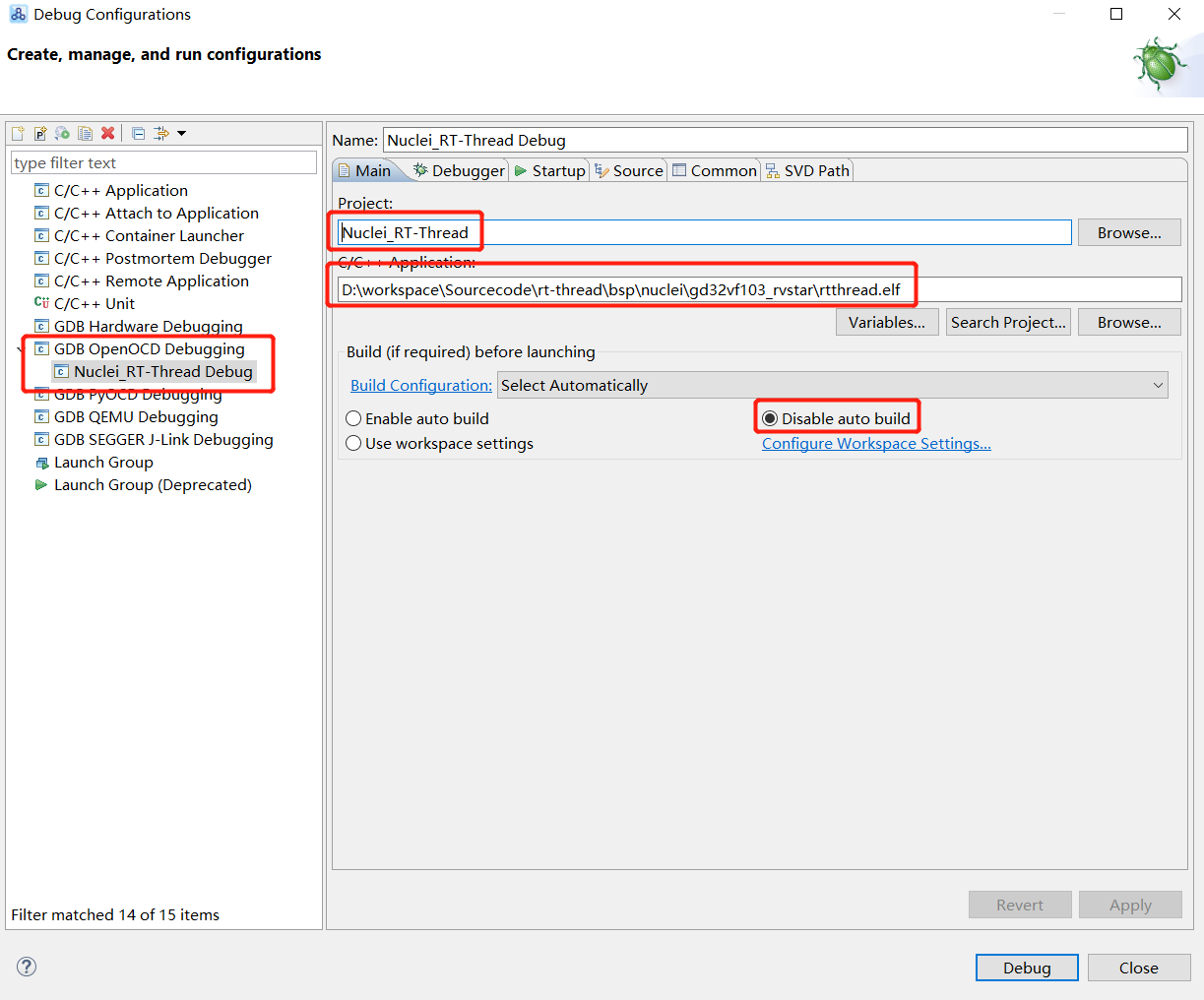
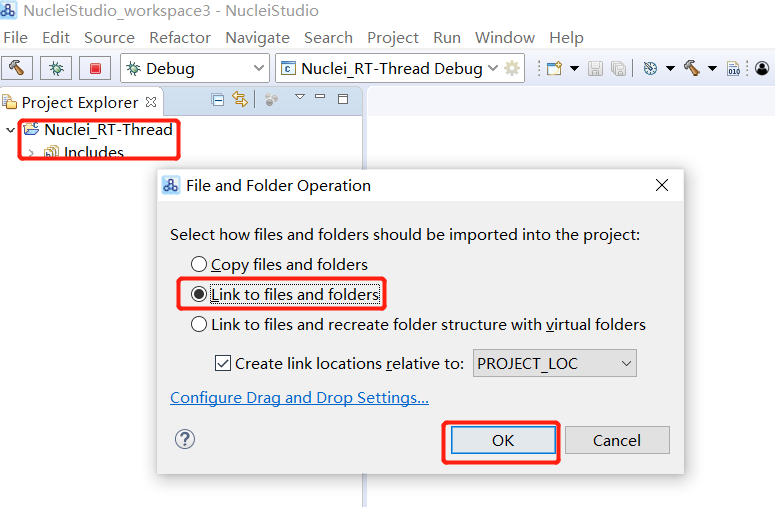
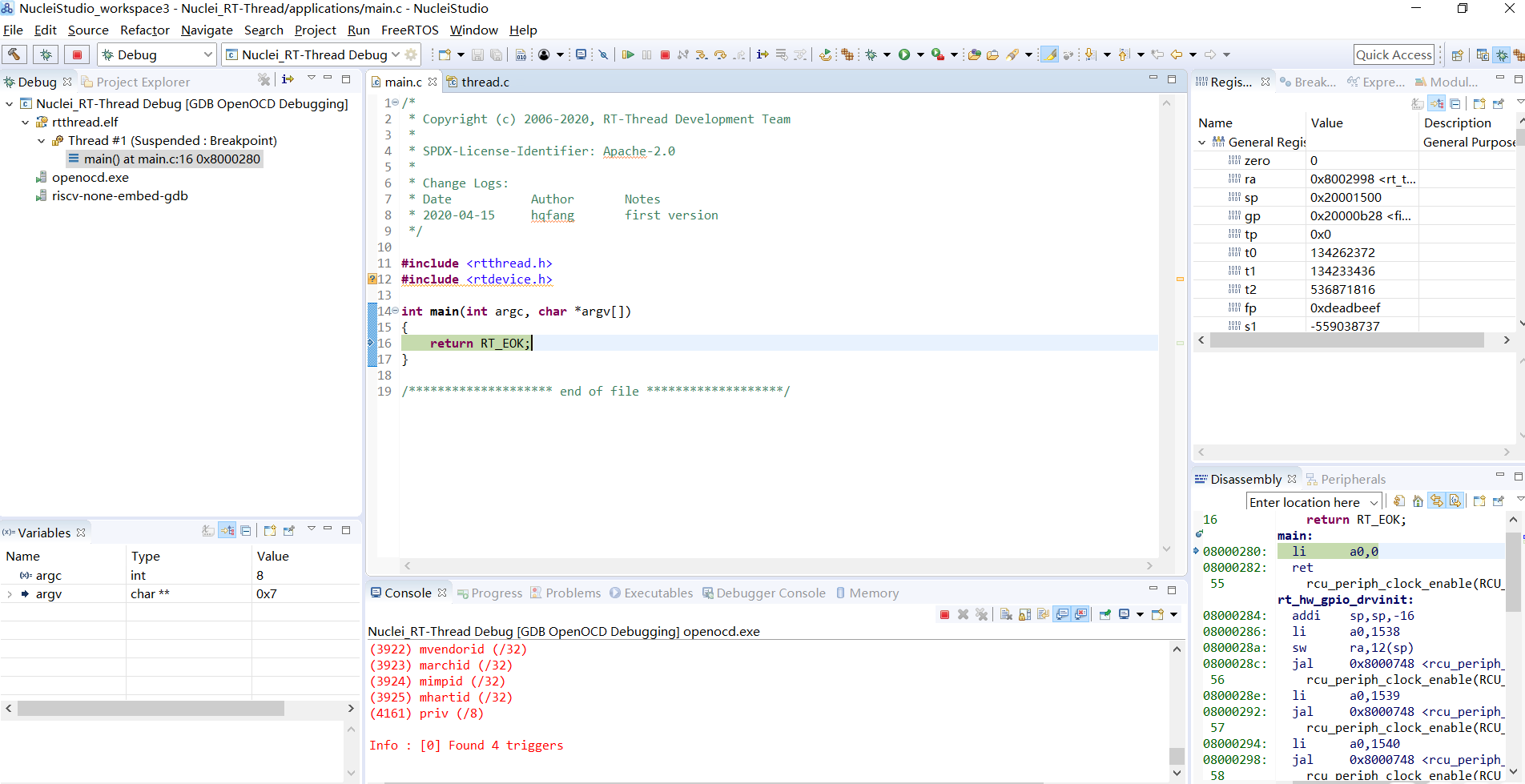
bsp/nuclei: Add more documentation about how to use RT-Thread in RV-STAR
Signed-off-by:  Huaqi Fang <578567190@qq.com>
commit c9474c20a558e9d7934a3d72cc9bb17a98c20871
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 14:06:42 2020 +0800
bsp/nuclei: remove comments in rt_hw_*_drvinit
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit 89b5caa2c3e55dc352b13f8e33229f03351b7049
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 13:52:12 2020 +0800
bsp/nuclei: Add a entry README.md for nuclei bsp
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit ae50d6e9bdc92ca4767c5ac7d0ded7252314a42e
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 11:52:52 2020 +0800
bsp/nuclei: update README.md cover more pinmux section
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit 1a42d85dfe5bc7b009f057784249d54d0c82de0f
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 08:52:06 2020 +0800
bsp/nuclei: clean up unused code in drv_spi.c
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit b40edcdf59c96ef261f65a0c023a24ac78cabb39
Author: Huaqi Fang <578567190@qq.com>
Date: Wed Jun 10 14:09:15 2020 +0800
bsp/nuclei: Format the code comments for hw pinmux init
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit c8ae9fdfdb989bbff85d911fee3124abd9d145db
Author: Huaqi Fang <578567190@qq.com>
Date: Mon Jun 8 17:12:43 2020 +0800
bsp/nuclei: Add more drivers support for gd32vf103
* More drivers are supported for rvstar board, see README.md
* If user want to use these supported drivers, menuconfig is required
* User also need to setup pinmux for its coresponding driver in
board/board.c
Signed-off-by: Huaqi Fang <578567190@qq.com>
Signed-off-by: Huaqi Fang <578567190@qq.com>
Huaqi Fang <578567190@qq.com>
commit c9474c20a558e9d7934a3d72cc9bb17a98c20871
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 14:06:42 2020 +0800
bsp/nuclei: remove comments in rt_hw_*_drvinit
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit 89b5caa2c3e55dc352b13f8e33229f03351b7049
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 13:52:12 2020 +0800
bsp/nuclei: Add a entry README.md for nuclei bsp
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit ae50d6e9bdc92ca4767c5ac7d0ded7252314a42e
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 11:52:52 2020 +0800
bsp/nuclei: update README.md cover more pinmux section
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit 1a42d85dfe5bc7b009f057784249d54d0c82de0f
Author: Huaqi Fang <578567190@qq.com>
Date: Thu Jun 11 08:52:06 2020 +0800
bsp/nuclei: clean up unused code in drv_spi.c
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit b40edcdf59c96ef261f65a0c023a24ac78cabb39
Author: Huaqi Fang <578567190@qq.com>
Date: Wed Jun 10 14:09:15 2020 +0800
bsp/nuclei: Format the code comments for hw pinmux init
Signed-off-by: Huaqi Fang <578567190@qq.com>
commit c8ae9fdfdb989bbff85d911fee3124abd9d145db
Author: Huaqi Fang <578567190@qq.com>
Date: Mon Jun 8 17:12:43 2020 +0800
bsp/nuclei: Add more drivers support for gd32vf103
* More drivers are supported for rvstar board, see README.md
* If user want to use these supported drivers, menuconfig is required
* User also need to setup pinmux for its coresponding driver in
board/board.c
Signed-off-by: Huaqi Fang <578567190@qq.com>
Signed-off-by: Huaqi Fang <578567190@qq.com>
Showing
bsp/nuclei/README.md
0 → 100644
{kind=link}

93.2 KB
{kind=link}
34.2 KB
{kind=link}
72.1 KB
{kind=link}
39.4 KB
{kind=link}
152.4 KB