Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
2301_77017865
rt-thread
提交
9fdb710f
R
rt-thread
项目概览
2301_77017865
/
rt-thread
与 Fork 源项目一致
Fork自
RT-Thread / rt-thread
通知
1
Star
0
Fork
0
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
0
列表
看板
标记
里程碑
合并请求
0
DevOps
流水线
流水线任务
计划
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
R
rt-thread
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
0
Issue
0
列表
看板
标记
里程碑
合并请求
0
合并请求
0
Pages
DevOps
DevOps
流水线
流水线任务
计划
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
流水线任务
提交
Issue看板
前往新版Gitcode,体验更适合开发者的 AI 搜索 >>
提交
9fdb710f
编写于
4月 09, 2023
作者:
mysterywolf
提交者:
mysterywolf
4月 09, 2023
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
[RTduino][stm32l476-nucleo] update readme
上级
422a9ec1
变更
3
隐藏空白更改
内联
并排
Showing
3 changed file
with
50 addition
and
30 deletion
+50
-30
bsp/stm32/stm32l476-st-nucleo/applications/arduino_pinout/README.md
...stm32l476-st-nucleo/applications/arduino_pinout/README.md
+49
-29
bsp/stm32/stm32l476-st-nucleo/applications/arduino_pinout/nulceo-l476-pinout.png
...nucleo/applications/arduino_pinout/nulceo-l476-pinout.png
+0
-0
bsp/stm32/stm32l476-st-nucleo/applications/arduino_pinout/pins_arduino.c
...l476-st-nucleo/applications/arduino_pinout/pins_arduino.c
+1
-1
未找到文件。
bsp/stm32/stm32l476-st-nucleo/applications/arduino_pinout/README.md
浏览文件 @
9fdb710f
#
xxx
开发板的Arduino生态兼容说明
#
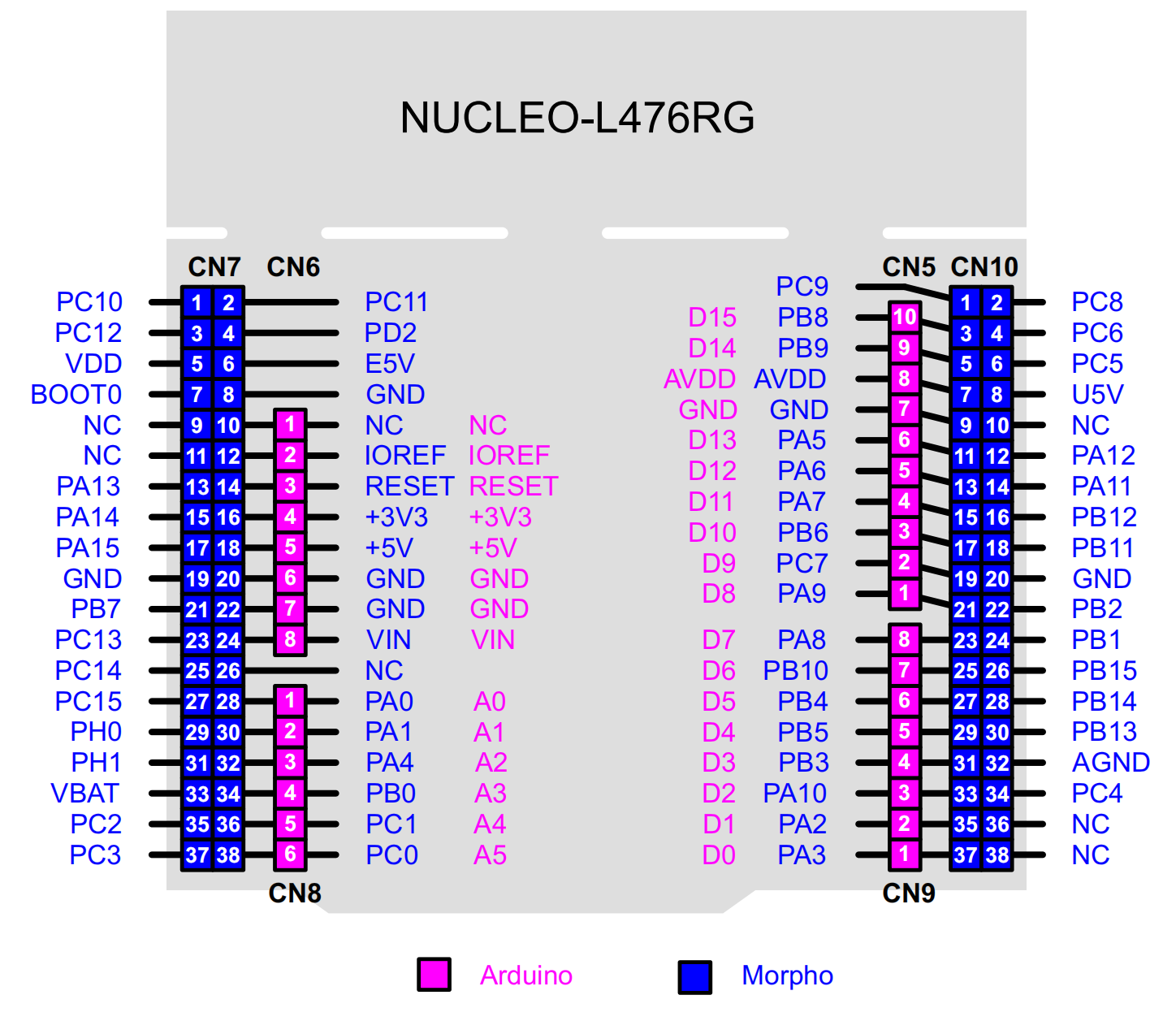
STM32L476 Nucleo
开发板的Arduino生态兼容说明
## 1 RTduino - RT-Thread的Arduino生态兼容层
xxx
开发板已经完整适配了
[
RTduino软件包
](
https://github.com/RTduino/RTduino
)
,即RT-Thread的Arduino生态兼容层。用户可以按照Arduino的编程习惯来操作该BSP,并且可以使用大量Arduino社区丰富的库,是对RT-Thread生态的极大增强。更多信息,请参见
[
RTduino软件包说明文档
](
https://github.com/RTduino/RTduino
)
。
STM32L476 Nucleo
开发板已经完整适配了
[
RTduino软件包
](
https://github.com/RTduino/RTduino
)
,即RT-Thread的Arduino生态兼容层。用户可以按照Arduino的编程习惯来操作该BSP,并且可以使用大量Arduino社区丰富的库,是对RT-Thread生态的极大增强。更多信息,请参见
[
RTduino软件包说明文档
](
https://github.com/RTduino/RTduino
)
。
### 1.1 如何开启针对本BSP的Arduino生态兼容层
...
...
@@ -18,36 +18,56 @@ Hardware Drivers Config --->
更多引脚布局相关信息参见
[
pins_arduino.c
](
pins_arduino.c
)
和
[
pins_arduino.h
](
pins_arduino.h
)
。


| Arduino引脚编号 | STM32引脚编号 | 5V容忍 | 备注 |
| ------------------- | --------- | ---- | ------------------------------------------------------------------------- |
| 0 (D0) | PA3 |
是/
否 | Serial-RX,默认被RT-Thread的UART设备框架uart2接管 |
| 1 (D1) | PA2 | 是
/否
| Serial-TX,默认被RT-Thread的UART设备框架uart2接管 |
| 2 (D2) | PA10 | 是
/否
| |
| 3 (D3) | PB3 | 是
/否
| PWM2-CH2,默认被RT-Thread的PWM设备框架pwm2接管 |
| 4 (D4) | PB5 | 是
/否
| |
| 5 (D5) | PB4 | 是
/否
| PWM3-CH1,默认被RT-Thread的PWM设备框架pwm3接管 |
| 6 (D6) | PB10 | 是
/否
| PWM2-CH3,默认被RT-Thread的PWM设备框架pwm2接管 |
| 7 (D7) | PA8 | 是
/否
| |
| 8 (D8) | PA9 | 是
/否
| |
| 9 (D9) | PC7 | 是
/否 | PWM3-CH0
,默认被RT-Thread的PWM设备框架pwm3接管 |
| 10 (D10) | PB6 | 是
/否
| PWM4-CH1,默认被RT-Thread的PWM设备框架pwm4接管 |
| 11 (D11) | PA7 | 是
/否
| PWM17-CH1,默认被RT-Thread的PWM设备框架pwm17接管 |
| 12 (D12) | PA6 | 是
/否
| |
| 13 (D13) | PA5 |
是/
否 | |
| 14 (D14) | PB9 | 是
/否
| I2C1-SDA,默认被RT-Thread的I2C设备框架i2c1接管 |
| 15 (D15) | PB8 | 是
/否
| I2C1-SCL,默认被RT-Thread的I2C设备框架i2c1接管 |
| 16 (D16) | PA5 |
是/
否 | |
| 17 (A0) | PA0 | 是
/否
| ADC1-CH5,默认被RT-Thread的ADC设备框架adc1接管 |
| 18 (A1) | PA1 | 是
/否
| ADC1-CH6,默认被RT-Thread的ADC设备框架adc1接管 |
| 19 (A2) | PA4 |
是/
否 | ADC1-CH9,默认被RT-Thread的ADC设备框架adc1接管 |
| 20 (A3) | PB0 |
是/
否 | ADC1-CH15,默认被RT-Thread的ADC设备框架adc1接管 |
| 21 (A4) | PC1 | 是
/否
| ADC1-CH2,默认被RT-Thread的ADC设备框架adc1接管 |
| 22 (A5) | PC0 | 是
/否
| ADC1-CH1,默认被RT-Thread的ADC设备框架adc1接管 |
| 0 (D0) | PA3 | 否 | Serial-RX,默认被RT-Thread的UART设备框架uart2接管 |
| 1 (D1) | PA2 | 是 | Serial-TX,默认被RT-Thread的UART设备框架uart2接管 |
| 2 (D2) | PA10 | 是 | |
| 3 (D3) | PB3 | 是 | PWM2-CH2,默认被RT-Thread的PWM设备框架pwm2接管 |
| 4 (D4) | PB5 | 是 | |
| 5 (D5) | PB4 | 是 | PWM3-CH1,默认被RT-Thread的PWM设备框架pwm3接管 |
| 6 (D6) | PB10 | 是 | PWM2-CH3,默认被RT-Thread的PWM设备框架pwm2接管 |
| 7 (D7) | PA8 | 是 | |
| 8 (D8) | PA9 | 是 | |
| 9 (D9) | PC7 | 是
| PWM3-CH2
,默认被RT-Thread的PWM设备框架pwm3接管 |
| 10 (D10) | PB6 | 是 | PWM4-CH1,默认被RT-Thread的PWM设备框架pwm4接管 |
| 11 (D11) | PA7 | 是 | PWM17-CH1,默认被RT-Thread的PWM设备框架pwm17接管 |
| 12 (D12) | PA6 | 是 | |
| 13 (D13) | PA5 | 否 | |
| 14 (D14) | PB9 | 是 | I2C1-SDA,默认被RT-Thread的I2C设备框架i2c1接管 |
| 15 (D15) | PB8 | 是 | I2C1-SCL,默认被RT-Thread的I2C设备框架i2c1接管 |
| 16 (D16) | PA5 | 否 | |
| 17 (A0) | PA0 | 是 | ADC1-CH5,默认被RT-Thread的ADC设备框架adc1接管 |
| 18 (A1) | PA1 | 是 | ADC1-CH6,默认被RT-Thread的ADC设备框架adc1接管 |
| 19 (A2) | PA4 | 否 | ADC1-CH9,默认被RT-Thread的ADC设备框架adc1接管 |
| 20 (A3) | PB0 | 否 | ADC1-CH15,默认被RT-Thread的ADC设备框架adc1接管 |
| 21 (A4) | PC1 | 是 | ADC1-CH2,默认被RT-Thread的ADC设备框架adc1接管 |
| 22 (A5) | PC0 | 是 | ADC1-CH1,默认被RT-Thread的ADC设备框架adc1接管 |
| 23 (A6) | -- | | 芯片内部参考电压 ADC,默认被RT-Thread的ADC设备框架adc1接管 |
| 24 (A7) | -- | | 芯片内部温度 ADC,默认被RT-Thread的ADC设备框架adc1接管 |
> 注意:
>
> 1. xxxxxxxxx
> 2. xxxxxxxxx
>
> 1. 驱动舵机和analogWrite函数要选择不同定时器发生的PWM信号引脚,由于STM32的定时器4个通道需要保持相同的频率,如果采用相同的定时器发生的PWM分别驱动舵机和analogWrite,可能会导致舵机失效。
> 2. USART2是Nucleo板的默认串口,理论应对接到了Arduino引脚编号的D0和D1,但是其实际用于串口通信,因此不允许当做普通IO来使用和操作。如果需要将D0、D1与STM32 USART2的引脚相连,需要手动焊接锡桥SB62、SB63。
> 3. Nucleo板的Arduino接口中AVDD(即AREF)默认是与VDD相连的,如果需要扩展板提供外部参考电压,需要将SB57锡桥挑开。
> 参考资料
>
> 1. [STM32 Nucleo-64板用户手册](https://www.st.com/resource/en/user_manual/um1724-stm32-nucleo64-boards-mb1136-stmicroelectronics.pdf)
## 3 通信
### 3.1 I2C总线
STM32F410 Nucleo板的I2C总线是板上丝印的
`SCL/D15`
和
`SDA/D14`
引脚,这两个引脚是被RT-Thread I2C设备框架接管的,不需要直接操控这两个引脚,直接引用
`#include <Wire.h>`
(Arduino官方I2C头文件)即可使用。
### 3.2 SPI总线
目前本BSP不支持使用Arduino的SPI功能。
### 3.3 串口
本BSP通过
`Serial.`
方法调用
`uart2`
串口设备。详见
[
例程
](
https://github.com/RTduino/RTduino/blob/master/examples/Basic/helloworld.cpp
)
。
bsp/stm32/stm32l476-st-nucleo/applications/arduino_pinout/nulceo-l476-pinout.png
0 → 100644
浏览文件 @
9fdb710f
285.5 KB
bsp/stm32/stm32l476-st-nucleo/applications/arduino_pinout/pins_arduino.c
浏览文件 @
9fdb710f
...
...
@@ -29,7 +29,7 @@ const pin_map_t pin_map_table[]=
{
D6
,
GET_PIN
(
B
,
10
),
"pwm2"
,
3
},
/* PWM */
{
D7
,
GET_PIN
(
A
,
8
)},
{
D8
,
GET_PIN
(
A
,
9
)},
{
D9
,
GET_PIN
(
C
,
7
),
"pwm3"
,
0
},
/* PWM */
{
D9
,
GET_PIN
(
C
,
7
),
"pwm3"
,
2
},
/* PWM */
{
D10
,
GET_PIN
(
B
,
6
),
"pwm4"
,
1
},
/* PWM */
{
D11
,
GET_PIN
(
A
,
7
),
"pwm17"
,
1
},
/* PWM */
{
D12
,
GET_PIN
(
A
,
6
)},
...
...
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}