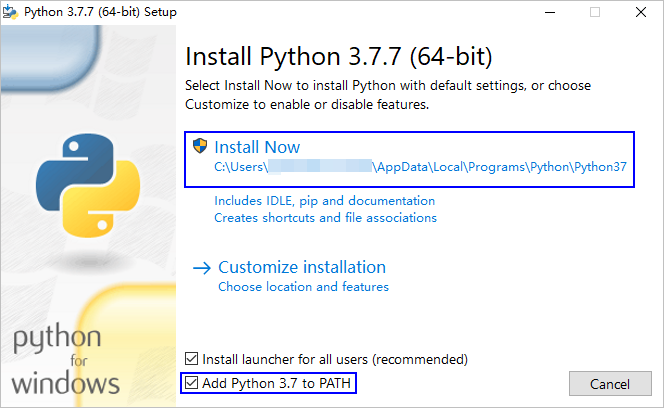
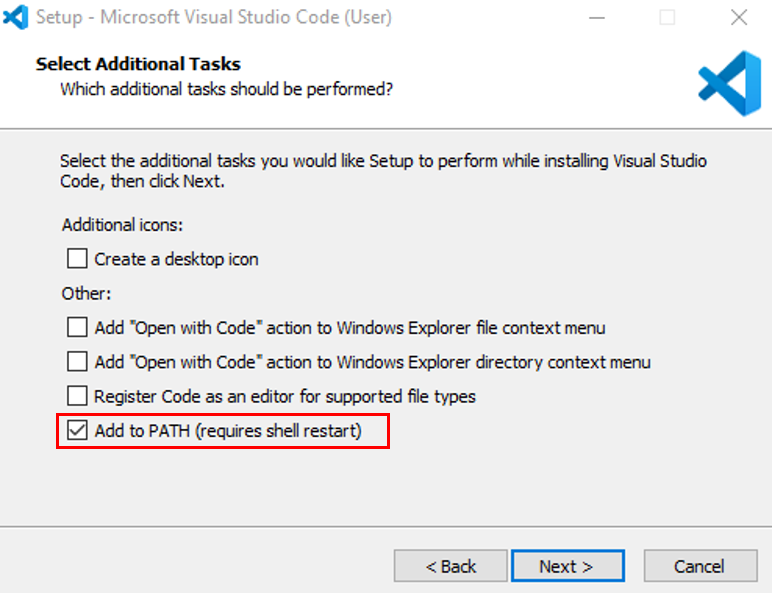
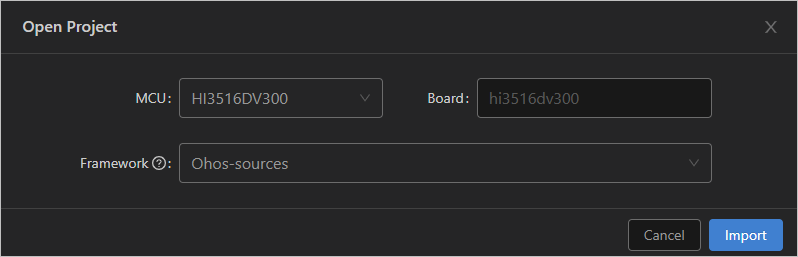
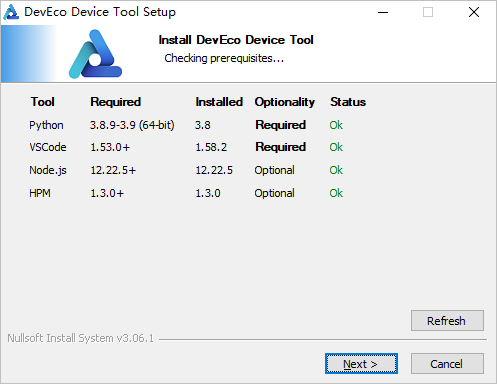
update 导入OpenHarmony工程
Signed-off-by: Nduangavin123 <duanxichao@huawei.com>
Showing
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
20.5 KB
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
34.8 KB
文件已移动

18.6 KB
77.8 KB
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动

1.4 KB
30.0 KB
94.8 KB

1.5 KB

1.4 KB

30.0 KB

94.2 KB

2.4 KB

83.1 KB

19.4 KB

1.5 KB
185.7 KB

2.2 KB
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
14.1 KB
文件已移动
文件已移动
文件已移动
文件已移动
21.5 KB
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
34.8 KB
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
16.2 KB

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
16.2 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}

1.6 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}

2.2 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
14.1 KB
{kind=link}
文件已移动
{kind=link}
24.9 KB
{kind=link}

16.9 KB
{kind=link}
94.0 KB
{kind=link}
21.5 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
52.7 KB
{kind=link}
文件已移动
{kind=link}
177.7 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
1.8 KB
{kind=link}

9.2 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}

367 字节
{kind=link}
19.6 KB
{kind=link}

1.4 KB
{kind=link}
78.2 KB
{kind=link}
19.6 KB
{kind=link}
93.9 KB
{kind=link}

30.0 KB
{kind=link}
101.4 KB
{kind=link}

94.2 KB
{kind=link}
101.4 KB
{kind=link}

93.9 KB
{kind=link}
38.9 KB
{kind=link}
38.9 KB
{kind=link}
38.5 KB
{kind=link}

1.5 KB
{kind=link}
44.6 KB
{kind=link}

367 字节
{kind=link}
22.5 KB
{kind=link}

2.2 KB
{kind=link}
44.6 KB
{kind=link}

78.2 KB
{kind=link}
83.1 KB
{kind=link}
38.5 KB
{kind=link}

21.6 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
19.4 KB
{kind=link}
19.4 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
91.1 KB
{kind=link}
91.1 KB
{kind=link}
文件已移动
{kind=link}
文件已移动
{kind=link}
文件已移动