Merge remote-tracking branch 'upstream/develop' into fluid
Conflicts: paddle/platform/place.h
Showing
doc/design/fluid-compiler.graffle
0 → 100644
文件已添加
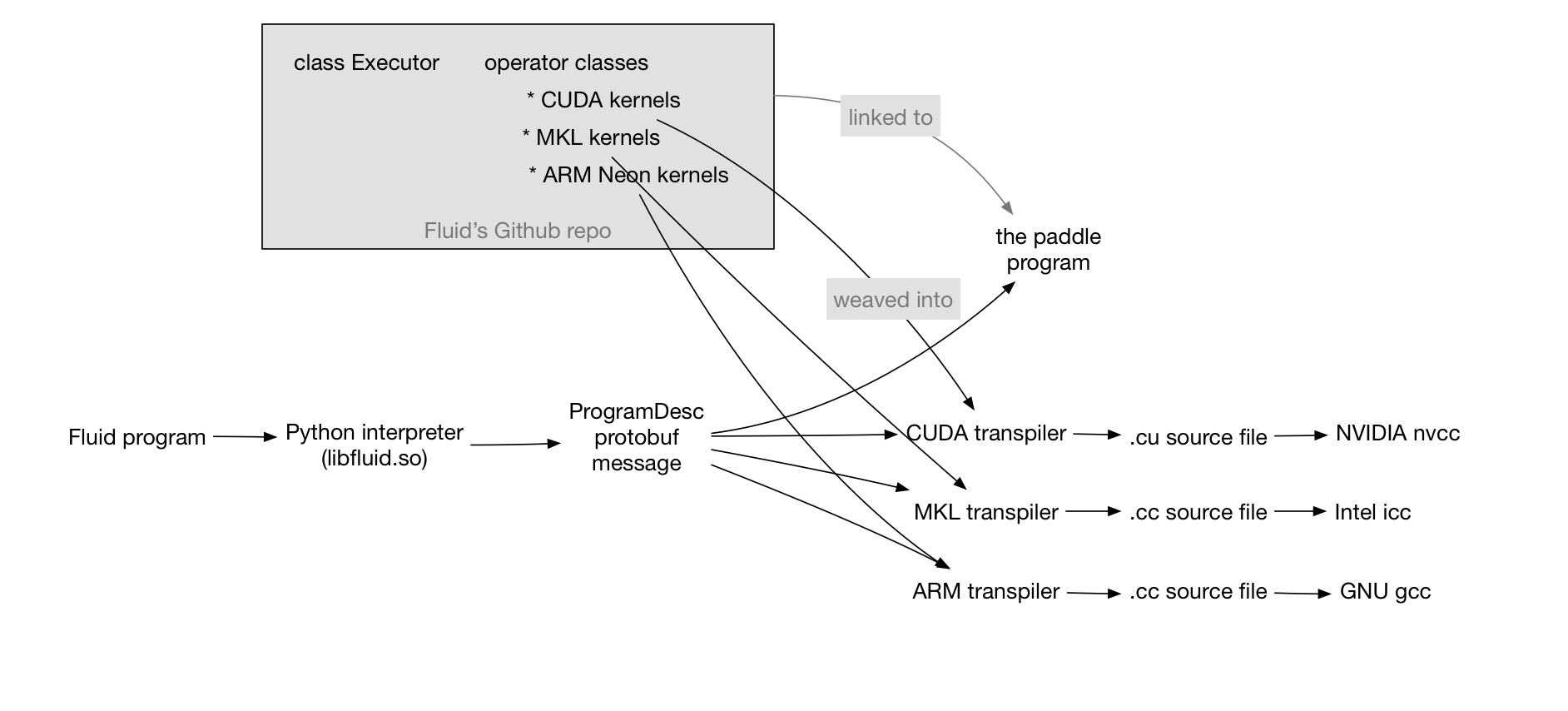
doc/design/fluid-compiler.png
0 → 100644
{kind=link}
121.2 KB
doc/design/fluid.md
0 → 100644