# YOLOv3 目标检测
---
## 内容
- [简介](#简介)
- [快速开始](#快速开始)
- [进阶使用](#进阶使用)
- [FAQ](#faq)
- [参考文献](#参考文献)
- [版本更新](#版本更新)
- [如何贡献代码](#如何贡献代码)
- [作者](#作者)
## 简介
[YOLOv3](https://arxiv.org/abs/1804.02767) 是由 [Joseph Redmon](https://arxiv.org/search/cs?searchtype=author&query=Redmon%2C+J) 和 [Ali Farhadi](https://arxiv.org/search/cs?searchtype=author&query=Farhadi%2C+A) 提出的单阶段检测器, 该检测器与达到同样精度的传统目标检测方法相比,推断速度能达到接近两倍.
在我们的实现版本中使用了 [Bag of Freebies for Training Object Detection Neural Networks](https://arxiv.org/abs/1902.04103v3) 中提出的图像增强和label smooth等优化方法,精度优于darknet框架的实现版本,在COCO-2017数据集上,我们达到`mAP(0.50:0.95)= 38.9`的精度,比darknet实现版本的精度(33.0)要高5.9.
同时,在推断速度方面,基于Paddle预测库的加速方法,推断速度比darknet高30%.
## 快速开始
### 安装
**安装[COCO-API](https://github.com/cocodataset/cocoapi):**
训练前需要首先下载[COCO-API](https://github.com/cocodataset/cocoapi):
git clone https://github.com/cocodataset/cocoapi.git
cd cocoapi/PythonAPI
# if cython is not installed
pip install Cython
# Install into global site-packages
make install
# Alternatively, if you do not have permissions or prefer
# not to install the COCO API into global site-packages
python2 setup.py install --user
**安装[PaddlePaddle](https://github.com/PaddlePaddle/Paddle):**
在当前目录下运行样例代码需要PadddlePaddle Fluid的v.1.4或以上的版本。如果你的运行环境中的PaddlePaddle低于此版本,请根据[安装文档](http://paddlepaddle.org/documentation/docs/zh/1.4/beginners_guide/install/index_cn.html)中的说明来更新PaddlePaddle。
### 数据准备
**COCO数据集:**
在[MS-COCO数据集](http://cocodataset.org/#download)上进行训练,通过如下方式下载数据集。
cd dataset/coco
./download.sh
数据目录结构如下:
```
dataset/coco/
├── annotations
│ ├── instances_train2014.json
│ ├── instances_train2017.json
│ ├── instances_val2014.json
│ ├── instances_val2017.json
| ...
├── train2017
│ ├── 000000000009.jpg
│ ├── 000000580008.jpg
| ...
├── val2017
│ ├── 000000000139.jpg
│ ├── 000000000285.jpg
| ...
```
**自定义数据集:**
用户可使用自定义的数据集,我们推荐自定义数据集使用COCO数据集格式的标注,并可通过设置`--data_dir`或修改[reader.py](https://github.com/PaddlePaddle/models/blob/623698ef30cc2f7879e47621678292254d6af51e/PaddleCV/yolov3/reader.py#L39)指定数据集路径。使用COCO数据集格式标注时,目录结构可参考上述COCO数据集目录结构。
### 模型训练
**下载预训练模型:** 本示例提供DarkNet-53预训练[模型](https://paddlemodels.bj.bcebos.com/yolo/darknet53.tar.gz),该模型转换自作者提供的预训练权重[pjreddie/darknet](https://pjreddie.com/media/files/darknet53.conv.74),采用如下命令下载预训练模型:
sh ./weights/download.sh
通过设置`--pretrain` 加载预训练模型。同时在fine-tune时也采用该设置加载已训练模型。
请在训练前确认预训练模型下载与加载正确,否则训练过程中损失可能会出现NAN。
**开始训练:** 数据准备完毕后,可以通过如下的方式启动训练:
python train.py \
--model_save_dir=output/ \
--pretrain=${path_to_pretrain_model} \
--data_dir=${path_to_data} \
--class_num=${category_num}
- 通过设置`export CUDA_VISIBLE_DEVICES=0,1,2,3,4,5,6,7`指定8卡GPU训练。
- 可选参数见:
python train.py --help
**注意:** YOLOv3模型总batch size为64,这里使用8 GPUs每GPU上batch size为8来训练
**模型设置:**
* 模型使用了基于COCO数据集生成的9个先验框:10x13,16x30,33x23,30x61,62x45,59x119,116x90,156x198,373x326
* YOLOv3模型中,若预测框不是该点最佳匹配框但是和任一ground truth框的重叠大于`ignore_thresh=0.7`,则忽略该预测框的目标性损失
**训练策略:**
* 采用momentum优化算法训练YOLOv3,momentum=0.9。
* 学习率采用warmup算法,前4000轮学习率从0.0线性增加至0.001。在400000,450000轮时使用0.1,0.01乘子进行学习率衰减,最大训练500000轮。
* 通过设置`--syncbn=True`可以开启Synchronized batch normalization,该模式下精度会提高
下图为模型训练结果:
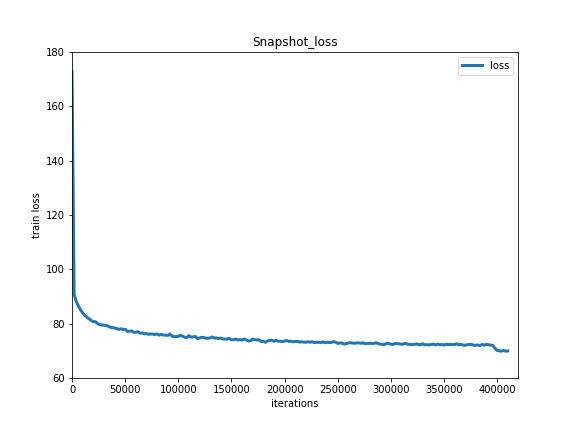
Train Loss
### 模型评估
模型评估是指对训练完毕的模型评估各类性能指标。本示例采用[COCO官方评估](http://cocodataset.org/#detections-eval), 用户可通过如下方式下载Paddle发布的YOLOv3[模型](https://paddlemodels.bj.bcebos.com/yolo/yolov3.tar.gz)
sh ./weights/download.sh
`eval.py`是评估模块的主要执行程序,调用示例如下:
python eval.py \
--dataset=coco2017 \
--weights=${path_to_weights} \
--class_num=${category_num}
- 通过设置`export CUDA_VISIBLE_DEVICES=0`指定单卡GPU评估。
若训练时指定`--syncbn=False`, 模型评估精度如下:
| input size | mAP(IoU=0.50:0.95) | mAP(IoU=0.50) | mAP(IoU=0.75) |
| :------: | :------: | :------: | :------: |
| 608x608 | 37.7 | 59.8 | 40.8 |
| 416x416 | 36.5 | 58.2 | 39.1 |
| 320x320 | 34.1 | 55.4 | 36.3 |
若训练时指定`--syncbn=True`, 模型评估精度如下:
| input size | mAP(IoU=0.50:0.95) | mAP(IoU=0.50) | mAP(IoU=0.75) |
| :------: | :------: | :------: | :------: |
| 608x608 | 38.9 | 61.1 | 42.0 |
| 416x416 | 37.5 | 59.6 | 40.2 |
| 320x320 | 34.8 | 56.4 | 36.9 |
- **注意:** 评估结果基于`pycocotools`评估器,没有滤除`score < 0.05`的预测框,其他框架有此滤除操作会导致精度下降。
### 模型推断及可视化
模型推断可以获取图像中的物体及其对应的类别,`infer.py`是主要执行程序,调用示例如下:
python infer.py \
--dataset=coco2017 \
--weights=${path_to_weights} \
--class_num=${category_num} \
--image_path=data/COCO17/val2017/ \
--image_name=000000000139.jpg \
--draw_thresh=0.5
- 通过设置`export CUDA_VISIBLE_DEVICES=0`指定单卡GPU预测。
- 推断结果显示如下,并会在`./output`目录下保存带预测框的图像
```
Image person.jpg detect:
person at [190, 101, 273, 372] score: 0.98832
dog at [63, 263, 200, 346] score: 0.97049
horse at [404, 137, 598, 366] score: 0.97305
Detect result save at ./output/person.png
```
下图为模型可视化预测结果:


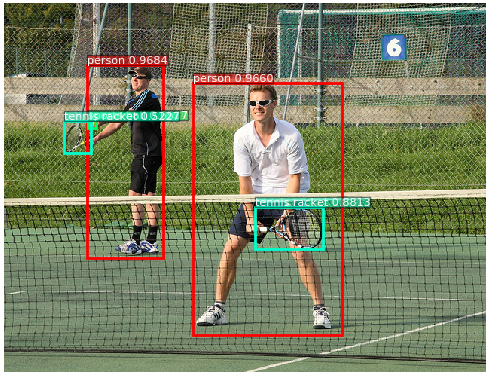

YOLOv3 预测可视化
### Benchmark
模型训练benchmark:
| 数据集 | GPU | CUDA | cuDNN | batch size | 训练速度(1 GPU) | 训练速度(8 GPU) | 显存占用(1 GPU) | 显存占用(8 GPU) |
| :-----: | :-: | :--: | :---: | :--------: | :-----------------: | :-----------------: | :------------: | :------------: |
| COCO | Tesla P40 | 8.0 | 7.1 | 8 (per GPU) | 30.2 images/s | 59.3 images/s | 10642 MB/GPU | 10782 MB/GPU |
模型单卡推断速度:
| GPU | CUDA | cuDNN | batch size | infer speed(608x608) | infer speed(416x416) | infer speed(320x320) |
| :-: | :--: | :---: | :--------: | :-----: | :-----: | :-----: |
| Tesla P40 | 8.0 | 7.1 | 1 | 48 ms/frame | 29 ms/frame |24 ms/frame |
### 服务部署
进行YOLOv3的服务部署,用户可以在[eval.py](https://github.com/PaddlePaddle/models/blob/623698ef30cc2f7879e47621678292254d6af51e/PaddleCV/yolov3/eval.py#L58)中保存可部署的推断模型,该模型可以用Paddle预测库加载和部署,参考[Paddle预测库](http://paddlepaddle.org/documentation/docs/zh/1.4/advanced_usage/deploy/index_cn.html)
## 进阶使用
### 背景介绍
传统目标检测方法通过两阶段检测,第一阶段生成预选框,第二阶段对预选框进行分类得到类别,而YOLO将目标检测看做是对框位置和类别概率的一个单阶段回归问题,使得YOLO能达到近两倍的检测速度。而YOLOv3在YOLO的基础上引入的多尺度预测,使得YOLOv3网络对于小物体的检测精度大幅提高。
### 模型概览
[YOLOv3](https://arxiv.org/abs/1804.02767) 是一阶段End2End的目标检测器。其目标检测原理如下图所示:

YOLOv3检测原理
### 模型结构
YOLOv3将输入图像分成S\*S个格子,每个格子预测B个bounding box,每个bounding box预测内容包括: Location(x, y, w, h)、Confidence Score和C个类别的概率,因此YOLOv3输出层的channel数为S\*S\*B\*(5 + C)。YOLOv3的loss函数也有三部分组成:Location误差,Confidence误差和分类误差。
YOLOv3的网络结构如下图所示:
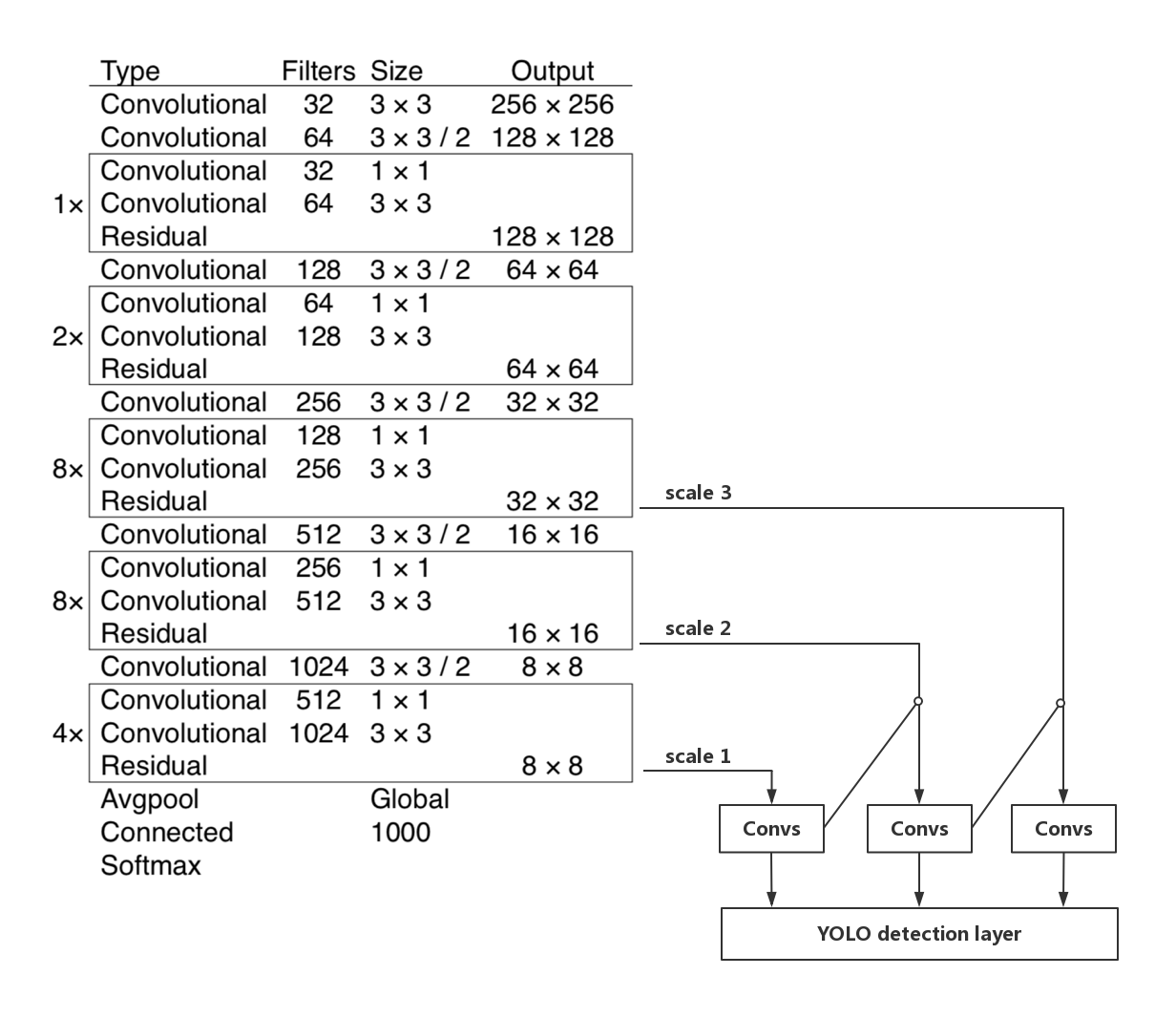
YOLOv3网络结构
YOLOv3 的网络结构由基础特征提取网络、multi-scale特征融合层和输出层组成。
1. 特征提取网络。YOLOv3使用 [DarkNet53](https://arxiv.org/abs/1612.08242)作为特征提取网络:DarkNet53 基本采用了全卷积网络,用步长为2的卷积操作替代了池化层,同时添加了 Residual 单元,避免在网络层数过深时发生梯度弥散。
2. 特征融合层。为了解决之前YOLO版本对小目标不敏感的问题,YOLOv3采用了3个不同尺度的特征图来进行目标检测,分别为13\*13,26\*26,52\*52,用来检测大、中、小三种目标。特征融合层选取 DarkNet 产出的三种尺度特征图作为输入,借鉴了FPN(feature pyramid networks)的思想,通过一系列的卷积层和上采样对各尺度的特征图进行融合。
3. 输出层。同样使用了全卷积结构,其中最后一个卷积层的卷积核个数是255:3\*(80+4+1)=255,3表示一个grid cell包含3个bounding box,4表示框的4个坐标信息,1表示Confidence Score,80表示COCO数据集中80个类别的概率。
### 模型fine-tune
对YOLOv3进行fine-tune,用户可用`--pretrain`指定下载好的Paddle发布的YOLOv3[模型](https://paddlemodels.bj.bcebos.com/yolo/yolov3.tar.gz),并把`--class_num`设置为用户数据集的类别数。
在fine-tune时,若用户自定义数据集的类别数不等于COCO数据集的80类,则加载权重时不应加载`yolo_output`层的权重,可通过在[train.py](https://github.com/heavengate/models/blob/3fa6035550ebd4a425a2e354489967a829174155/PaddleCV/yolov3/train.py#L76)使用如下方式加载非`yolo_output`层的权重:
```python
if cfg.pretrain:
if not os.path.exists(cfg.pretrain):
print("Pretrain weights not found: {}".format(cfg.pretrain))
def if_exist(var):
return os.path.exists(os.path.join(cfg.pretrain, var.name)) \
and var.name.find('yolo_output') < 0
fluid.io.load_vars(exe, cfg.pretrain, predicate=if_exist)
```
若用户自定义数据集的类别是COCO数据集类别的子集,`yolo_output`层的权重可以进行裁剪后导入。例如用户数据集有6类分别对应COCO数据集80类中的第`[3, 19, 25, 41, 58, 73]`类,可通过如下方式裁剪`yolo_output`层权重:
```python
if cfg.pretrain:
if not os.path.exists(cfg.pretrain):
print("Pretrain weights not found: {}".format(cfg.pretrain))
def if_exist(var):
return os.path.exists(os.path.join(cfg.pretrain, var.name))
fluid.io.load_vars(exe, cfg.pretrain, predicate=if_exist)
cat_idxs = [3, 19, 25, 41, 58, 73]
# the first 5 channels is x, y, w, h, objectness,
# the following 80 channel is for 80 categories
channel_idxs = np.array(range(5) + [idx + 5 for idx in cat_idxs])
# we have 3 yolo_output layers
for i in range(3):
# crop conv weights
weights_tensor = fluid.global_scope().find_var(
"yolo_output.{}.conv.weights".format(i)).get_tensor()
weights = np.array(weights_tensor)
# each yolo_output layer has 3 anchors, 85 channels of each anchor
weights = np.concatenate(weights[channel_idxs],
weights[85 + channel_idxs],
weights[170 + channel_idxs])
weights_tensor.set(weights.astype('float32'), place)
# crop conv bias
bias_tensor = fluid.global_scope().find_var(
"yolo_output.{}.conv.bias".format(i)).get_tensor()
bias = np.array(bias_tensor)
bias = np.concatenate(bias[channel_idxs],
bias[85 + channel_idxs],
bias[150 + channel_idxs])
bias_tensor.set(bias.astype('float32'), place)
```
## FAQ
**Q:** 我使用单GPU训练,训练过程中`loss=nan`,这是为什么?
**A:** YOLOv3中`learning_rate=0.001`的设置是针对总batch size为64的情况,若用户的batch size小于该值,建议调小学习率。
**Q:** 我训练YOLOv3速度比较慢,要怎么提速?
**A:** YOLOv3的数据增强比较复杂,速度比较慢,可通过在[reader.py](https://github.com/PaddlePaddle/models/blob/66e135ccc4f35880d1cd625e9ec96c041835e37d/PaddleCV/yolov3/reader.py#L284)中增加数据读取的进程数来提速。若用户是进行fine-tune,也可将`--no_mixup_iter`设置大于`--max_iter`的值来禁用mixup提升速度。
## 参考文献
- [You Only Look Once: Unified, Real-Time Object Detection](https://arxiv.org/abs/1506.02640v5), Joseph Redmon, Santosh Divvala, Ross Girshick, Ali Farhadi.
- [YOLOv3: An Incremental Improvement](https://arxiv.org/abs/1804.02767v1), Joseph Redmon, Ali Farhadi.
- [Bag of Freebies for Training Object Detection Neural Networks](https://arxiv.org/abs/1902.04103v3), Zhi Zhang, Tong He, Hang Zhang, Zhongyue Zhang, Junyuan Xie, Mu Li.
## 版本更新
- 1/2019, 新增YOLOv3模型。
- 4/2019, 新增YOLOv3模型Synchronized batch normalization模式。
## 如何贡献代码
如果你可以修复某个issue或者增加一个新功能,欢迎给我们提交PR。如果对应的PR被接受了,我们将根据贡献的质量和难度进行打分(0-5分,越高越好)。如果你累计获得了10分,可以联系我们获得面试机会或者为你写推荐信。
## 作者
- [heavengate](https://github.com/heavengate)
- [tink2123](https://github.com/tink2123)