# YOLO V3 Objective Detection
---
## Table of Contents
- [Installation](#installation)
- [Introduction](#introduction)
- [Data preparation](#data-preparation)
- [Training](#training)
- [Evaluation](#evaluation)
- [Inference and Visualization](#inference-and-visualization)
- [Appendix](#appendix)
## Installation
Running sample code in this directory requires PaddelPaddle Fluid v.1.4 and later. If the PaddlePaddle on your device is lower than this version, please follow the instructions in [installation document](http://www.paddlepaddle.org/documentation/docs/zh/1.4/beginners_guide/install/install_doc.html#paddlepaddle) and make an update.
## Introduction
[YOLOv3](https://arxiv.org/abs/1804.02767) is a one stage end to end detector。the detection principle of YOLOv3 is as follow:
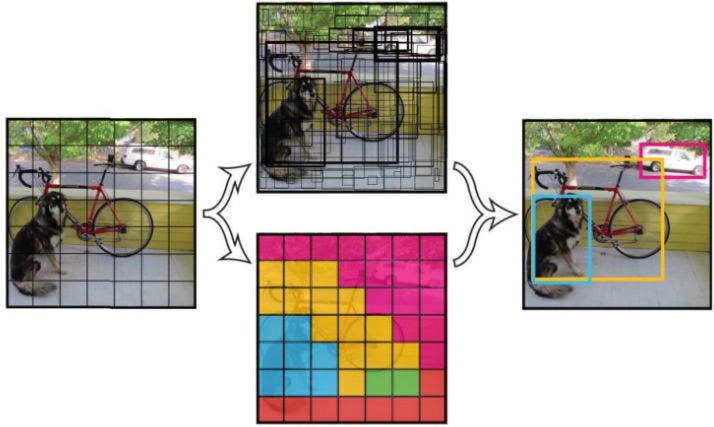
YOLOv3 detection principle
YOLOv3 divides the input image in to S\*S grids and predict B bounding boxes in each grid, predictions of boxes include Location(x, y, w, h), Confidence Score and probabilities of C classes, therefore YOLOv3 output layer has S\*S\*B\*(5 + C) channels. YOLOv3 loss consists of three parts: location loss, confidence loss and classification loss.
The bone network of YOLOv3 is darknet53, the structure of YOLOv3 is as follow:

YOLOv3 structure
YOLOv3 networks are composed of base feature extraction network, multi-scale feature fusion layers, and output layers.
1. Feature extraction network: YOLOv3 uses [DarkNet53](https://arxiv.org/abs/1612.08242) for feature extracion. Darknet53 uses a full convolution structure, replacing the pooling layer with a convolution operation of step size 2, and adding Residual-block to avoid gradient dispersion when the number of network layers is too deep.
2. Feature fusion layer. In order to solve the problem that the previous YOLO version is not sensitive to small objects, YOLOv3 uses three different scale feature maps for target detection, which are 13\*13, 26\*26, 52\*52, respectively, for detecting large, medium and small objects. The feature fusion layer selects the three scale feature maps produced by DarkNet as input, and draws on the idea of FPN (feature pyramid networks) to fuse the feature maps of each scale through a series of convolutional layers and upsampling.
3. Output layer: The output layer also uses a full convolution structure. The number of convolution kernels in the last convolutional layer is 255:3\*(80+4+1)=255, and 3 indicates that a grid cell contains 3 bounding boxes. 4 represents the four coordinate information of the box, 1 represents the Confidence Score, and 80 represents the probability of 80 categories in the COCO dataset.
## Data preparation
Train the model on [MS-COCO dataset](http://cocodataset.org/#download), download dataset as below:
cd dataset/coco
./download.sh
## Training
After data preparation, one can start the training step by:
python train.py \
--model_save_dir=output/ \
--pretrain=${path_to_pretrain_model}
--data_dir=${path_to_data}
- Set ```export CUDA_VISIBLE_DEVICES=0,1,2,3,4,5,6,7``` to specifiy 8 GPU to train.
- For more help on arguments:
python train.py --help
**download the pre-trained model:** This sample provides Resnet-50 pre-trained model which is converted from Caffe. The model fuses the parameters in batch normalization layer. One can download pre-trained model as:
sh ./weights/download.sh
Set `pretrain` to load pre-trained model. In addition, this parameter is used to load trained model when finetuning as well.
Please make sure that pre-trained model is downloaded and loaded correctly, otherwise, the loss may be NAN during training.
**Install the [cocoapi](https://github.com/cocodataset/cocoapi):**
To train the model, [cocoapi](https://github.com/cocodataset/cocoapi) is needed. Install the cocoapi:
git clone https://github.com/cocodataset/cocoapi.git
cd PythonAPI
# if cython is not installed
pip install Cython
# Install into global site-packages
make install
# Alternatively, if you do not have permissions or prefer
# not to install the COCO API into global site-packages
python2 setup.py install --user
**data reader introduction:**
* Data reader is defined in `reader.py` .
**model configuration:**
* The model uses 9 anchors generated based on the COCO dataset, which are (10x13), (16x30), (33x23), (30x61), (62x45), (59x119), (116x90), (156x198), (373x326).
* NMS threshold=0.7, NMS valid=0.1 nms_topk=400, nms_posk=100
**training strategy:**
* Use momentum optimizer with momentum=0.9.
* In first 1000 iteration, the learning rate increases linearly from 0.0 to 0.01. Then lr is decayed at 450000, 500000 iteration with multiplier 0.1, 0.01. The maximum iteration is 500000.
Training result is shown as below:
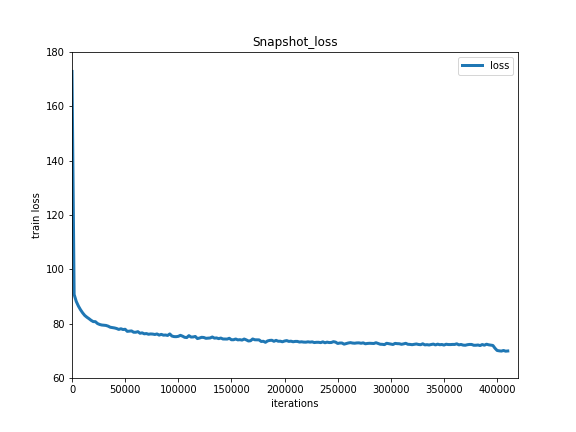
Train Loss
## Evaluation
Evaluation is to evaluate the performance of a trained model. This sample provides `eval.py` which uses a COCO-specific mAP metric defined by [COCO committee](http://cocodataset.org/#detections-eval).
`eval.py` is the main executor for evalution, one can start evalution step by:
python eval.py \
--dataset=coco2017 \
--weights=${path_to_weights} \
- Set ```export CUDA_VISIBLE_DEVICES=0``` to specifiy one GPU to eval.
Evalutaion result is shown as below:
| mAP |IoU=0.50:0.95 | IoU=0.50 | IoU=0.75 |
| :------: | :------: | :------: | :------: |
| input size=608x608| 37.7 | 59.8 | 40.8 |
| input size=416x416 | 36.5 | 58.2 | 39.1 |
| input size=320x320 | 34.1 | 55.4 | 36.3 |
## Inference and Visualization
Inference is used to get prediction score or image features based on trained models. `infer.py` is the main executor for inference, one can start infer step by:
python infer.py \
--dataset=coco2017 \
--weights=${path_to_weights} \
--image_path=data/COCO17/val2017/ \
--image_name=000000000139.jpg \
--draw_threshold=0.5
Visualization of infer result is shown as below:

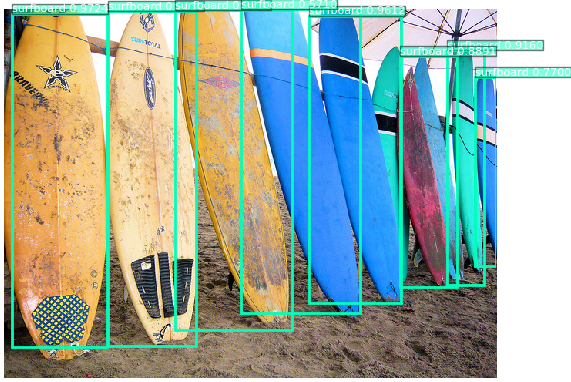
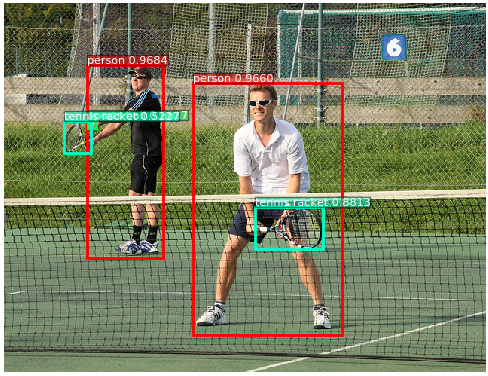

YOLOv3 Visualization Examples