 # Reproduce DQN model
+ DQN in:
[Human-level Control Through Deep Reinforcement Learning](http://www.nature.com/nature/journal/v518/n7540/full/nature14236.html)
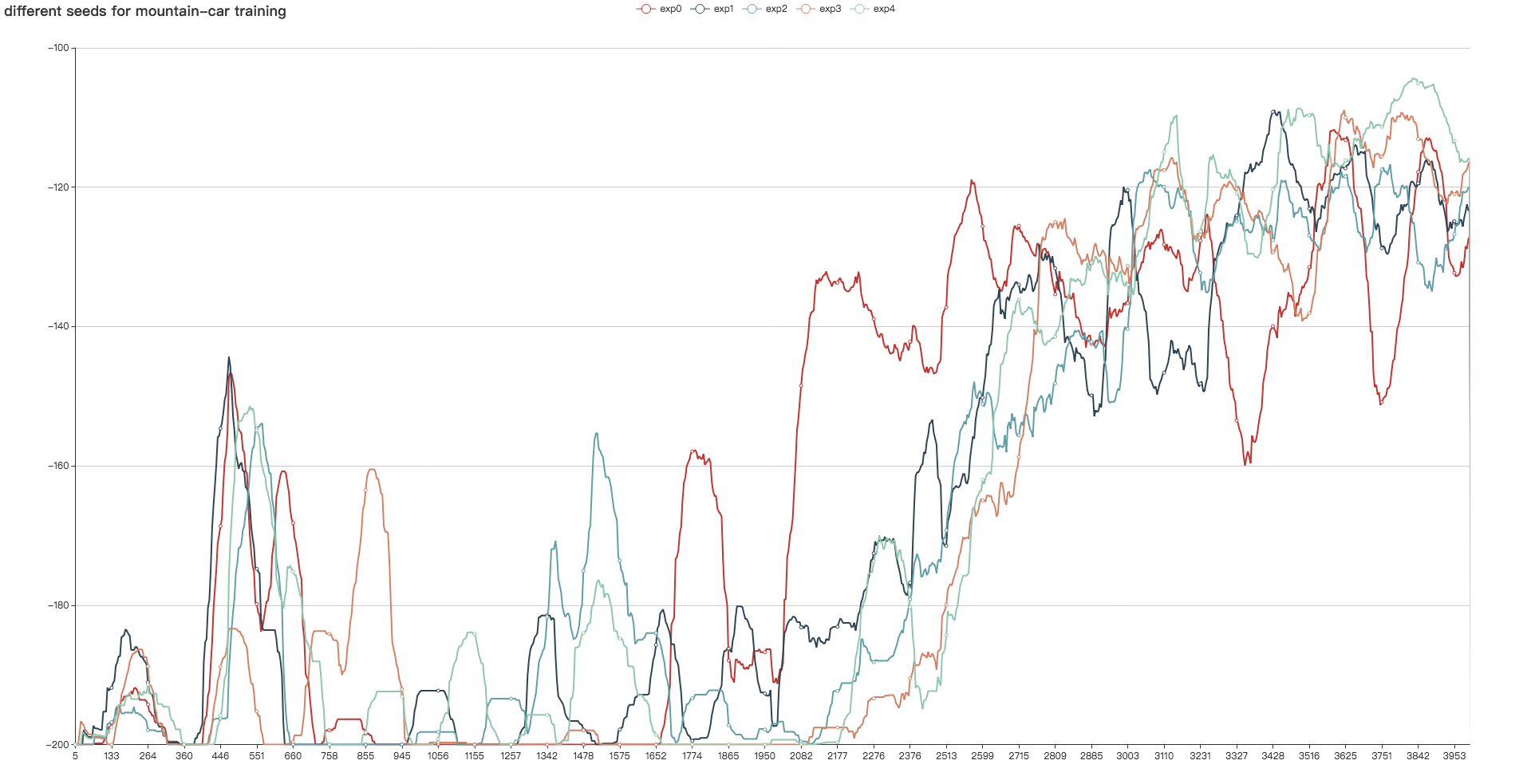
# Mountain-CAR benchmark & performance
[MountainCar-v0](https://gym.openai.com/envs/MountainCar-v0/)
A car is on a one-dimensional track, positioned between two "mountains". The goal is to drive up the mountain on the right; however, the car's engine is not strong enough to scale the mountain in a single pass. Therefore, the only way to succeed is to drive back and forth to build up momentum.
# Reproduce DQN model
+ DQN in:
[Human-level Control Through Deep Reinforcement Learning](http://www.nature.com/nature/journal/v518/n7540/full/nature14236.html)
# Mountain-CAR benchmark & performance
[MountainCar-v0](https://gym.openai.com/envs/MountainCar-v0/)
A car is on a one-dimensional track, positioned between two "mountains". The goal is to drive up the mountain on the right; however, the car's engine is not strong enough to scale the mountain in a single pass. Therefore, the only way to succeed is to drive back and forth to build up momentum.
 # How to use
+ Dependencies:
+ python2.7
+ gym
+ tqdm
+ paddle-fluid
+ Start Training:
```
# use mountain-car enviroment as default
python DQN.py
# use other enviorment
python DQN.py --env CartPole-v0
```
# How to use
+ Dependencies:
+ python2.7
+ gym
+ tqdm
+ paddle-fluid
+ Start Training:
```
# use mountain-car enviroment as default
python DQN.py
# use other enviorment
python DQN.py --env CartPole-v0
```