fix
Showing
fluid/faster_rcnn/README.md
0 → 100644
fluid/faster_rcnn/README_cn.md
0 → 100644
{kind=link}

40.6 KB
{kind=link}

84.6 KB
{kind=link}
104.2 KB
{kind=link}
45.9 KB
{kind=link}
27.1 KB
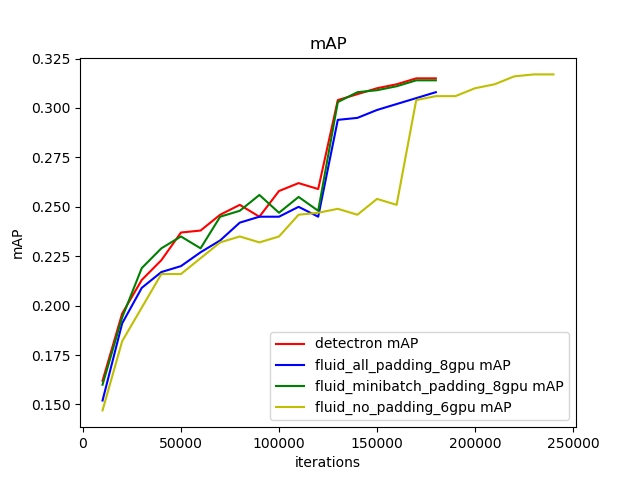
fluid/faster_rcnn/image/mAP.jpg
0 → 100644
{kind=link}
80.0 KB
{kind=link}

42.4 KB