fix conflict
Showing
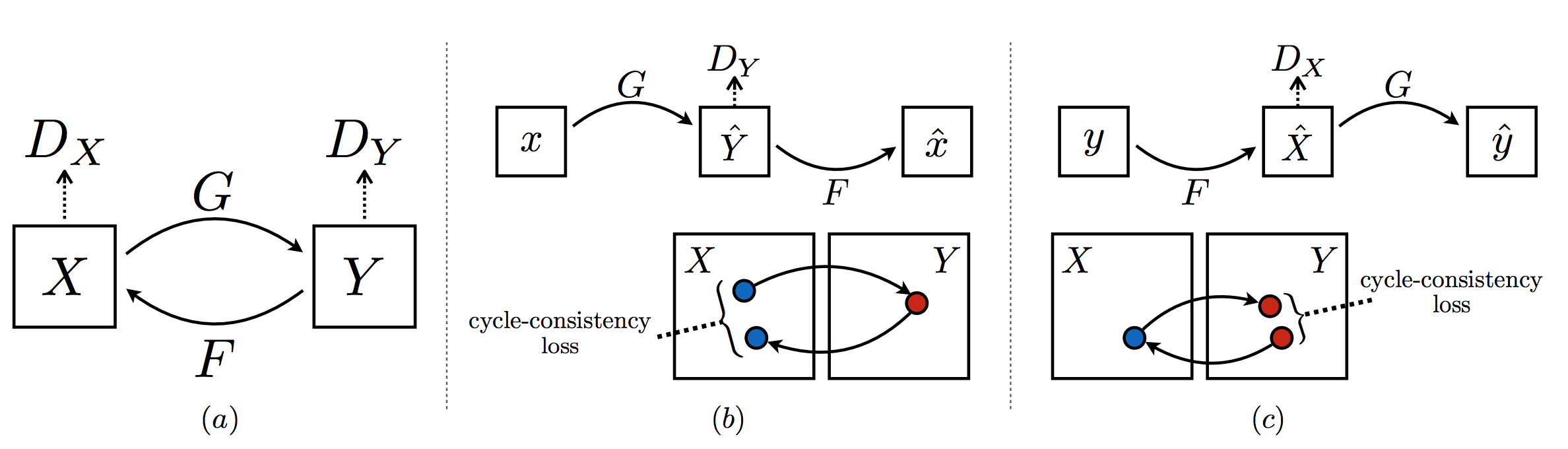
cyclegan/README.md
0 → 100644
cyclegan/__init__.py
0 → 100644
cyclegan/check.py
0 → 100644
cyclegan/cyclegan.py
0 → 100644
cyclegan/data.py
0 → 100644
cyclegan/image/A2B.png
0 → 100644
{kind=link}

154.5 KB
cyclegan/image/B2A.png
0 → 100644
{kind=link}

143.2 KB
cyclegan/image/net.png
0 → 100644
{kind=link}
152.5 KB
cyclegan/image/testA/123_A.jpg
0 → 100644
{kind=link}

33.4 KB
cyclegan/image/testB/78_B.jpg
0 → 100644
{kind=link}
24.8 KB
cyclegan/infer.py
0 → 100644
cyclegan/layers.py
0 → 100644
cyclegan/test.py
0 → 100644
cyclegan/train.py
0 → 100644
lac.py
0 → 100644
models/darknet.py
0 → 100755
models/yolov3.py
0 → 100644
text.py
0 → 100644
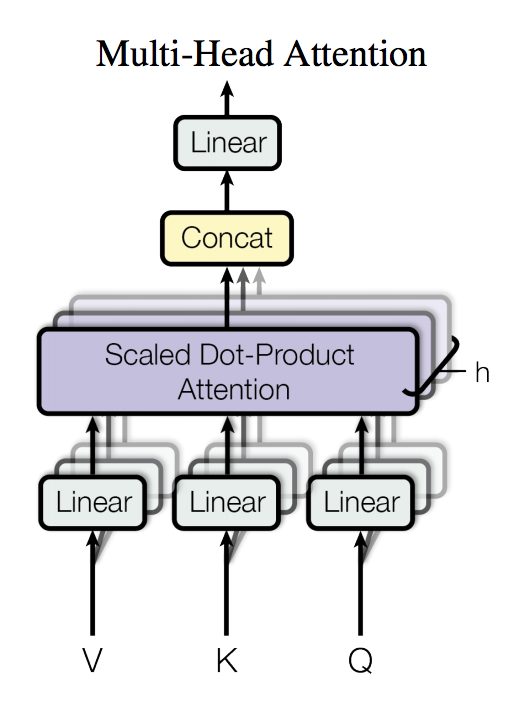
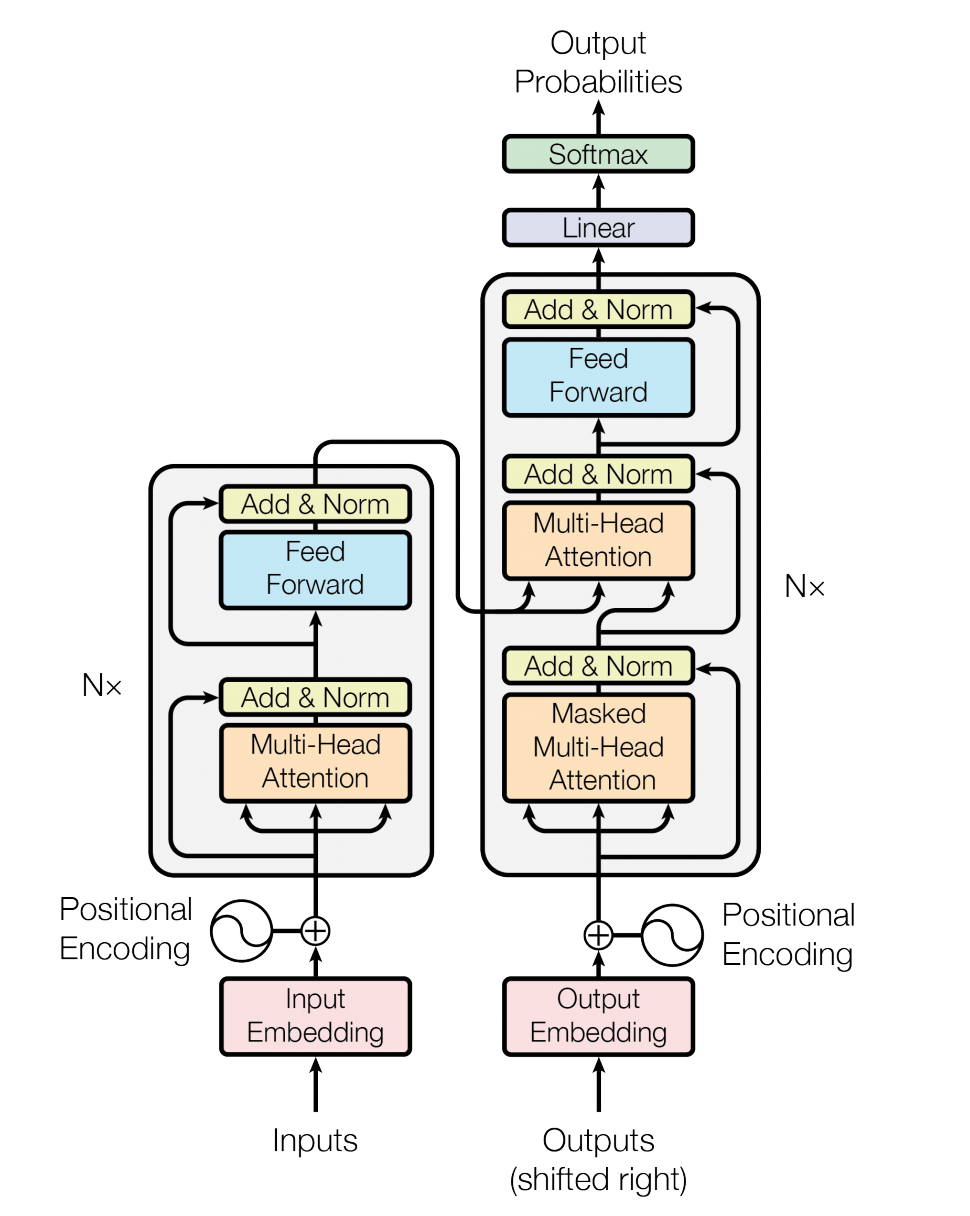
transformer/README.md
0 → 100644
{kind=link}
104.5 KB
{kind=link}
259.1 KB
transformer/predict.py
0 → 100644
transformer/reader.py
0 → 100644
transformer/run.sh
0 → 100644
transformer/train.py
0 → 100644
transformer/transformer.py
0 → 100644
transformer/transformer.yaml
0 → 100644
transformer/utils/__init__.py
0 → 100644
transformer/utils/check.py
0 → 100644
transformer/utils/configure.py
0 → 100644
yolov3.py
已删除
100644 → 0
yolov3/README.md
0 → 100644
yolov3/coco.py
0 → 100644
yolov3/image/YOLOv3.jpg
0 → 100644
{kind=link}
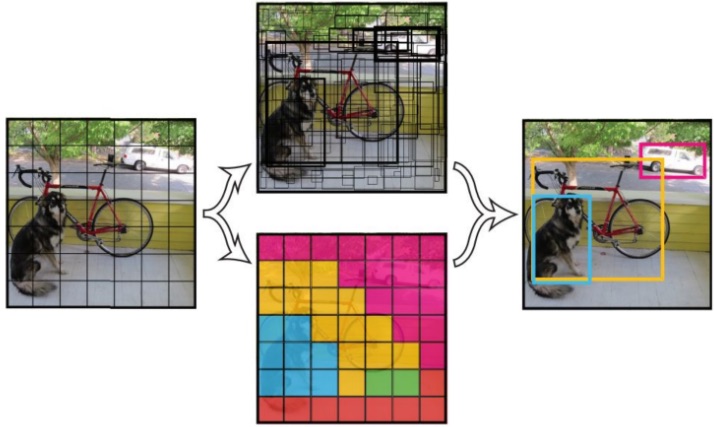
68.4 KB
yolov3/image/YOLOv3_structure.jpg
0 → 100644
{kind=link}
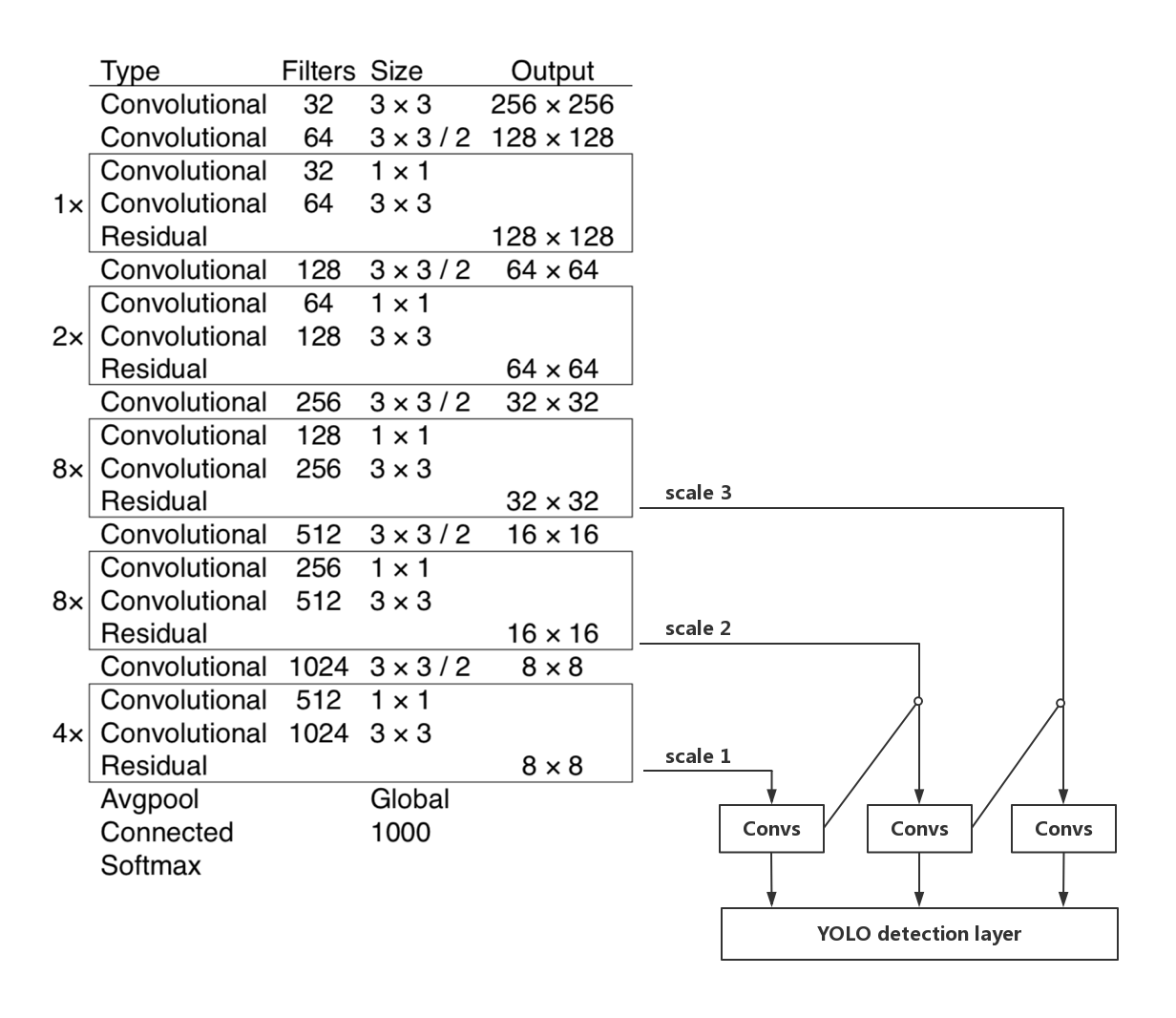
288.4 KB
yolov3/image/dog.jpg
0 → 100644
{kind=link}

159.9 KB
yolov3/infer.py
0 → 100644
yolov3/main.py
0 → 100644
yolov3/transforms.py
0 → 100644
yolov3/visualizer.py
0 → 100644