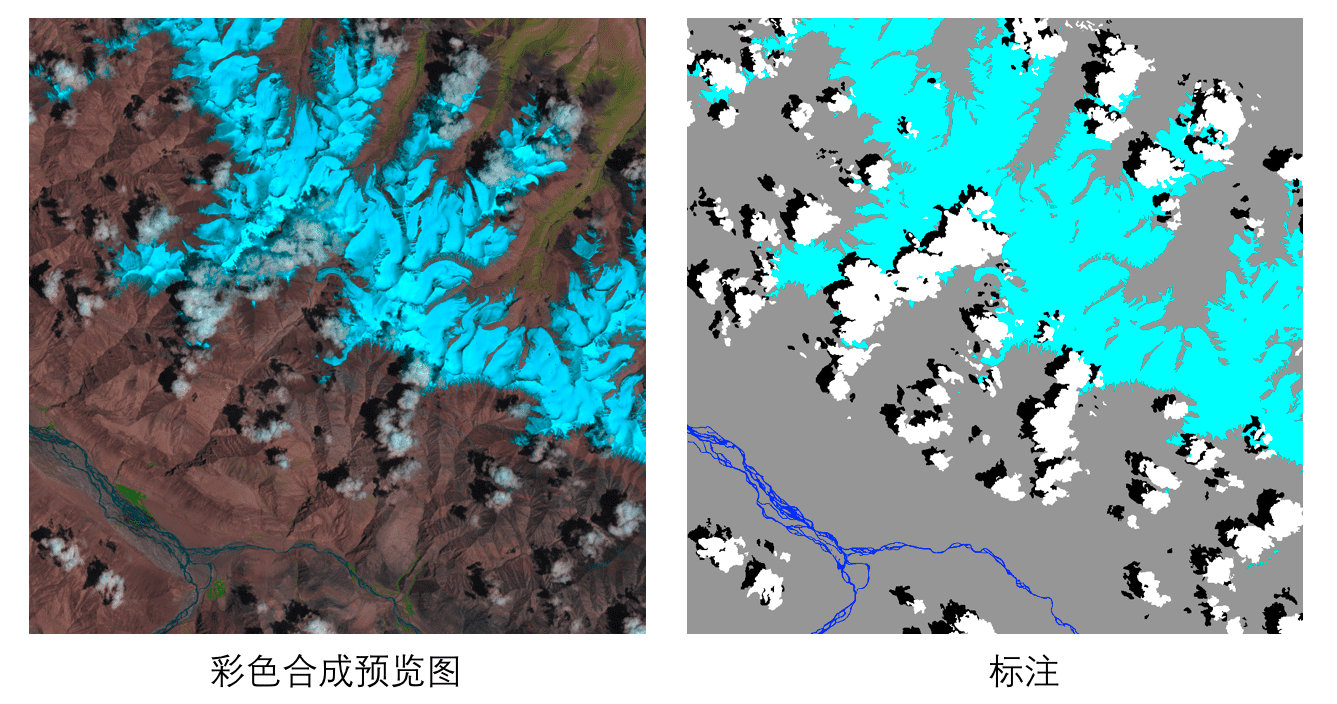
L8 SPARCS数据集示例
由于“flooded”和“shadow over water”2个类别占比仅为1.8%和0.24%,我们将其进行合并, “flooded”归为“land”,“shadow over water”归为“shadow”,合并后标注包含5个类别。 数值、类别、颜色对应表: |Pixel value|Class|Color| |---|---|---| |0|cloud|white| |1|shadow|black| |2|snow/ice|cyan| |3|water|blue| |4|land|grey| 执行以下命令下载并解压经过处理之后的数据集`remote_sensing_seg`: ```shell script mkdir dataset && cd dataset wget https://paddleseg.bj.bcebos.com/dataset/remote_sensing_seg.zip unzip remote_sensing_seg.zip cd .. ``` 其中`data`目录存放遥感影像,`data_vis`目录存放彩色合成预览图,`mask`目录存放标注图。 #### 数据协议 对于您自己的数据集,需要按照我们的[数据协议](docs/data_prepare.md)进行数据准备。 ### 2. 数据校验与分析 为确保能正常训练,我们应该先对数据集进行校验。同时,遥感影像往往由许多波段组成,不同波段数据分布可能大相径庭,例如可见光波段和热红外波段分布十分不同。为了更深入了解数据的组成、优化模型训练效果,需要对数据进行分析。 具体步骤参见[数据校验与分析](docs/data_analyse_and_check.md)章节。 ### 3. 模型训练 #### (1) 设置GPU卡号 ```shell script export CUDA_VISIBLE_DEVICES=0 ``` #### (2) 以U-Net为例,在RemoteSensing目录下运行`train_demo.py`即可开始训练。 ```shell script python train_demo.py --data_dir dataset/remote_sensing_seg \ --model_type unet \ --save_dir saved_model/remote_sensing_unet \ --num_classes 5 \ --channel 10 \ --lr 0.01 \ --clip_min_value 7172 6561 5777 5103 4291 4000 4000 4232 6934 7199 \ --clip_max_value 50000 50000 50000 50000 50000 40000 30000 18000 40000 36000 \ --mean 0.14311188522260637 0.14288498042151332 0.14812997807748615 0.16377211813814938 0.2737538363784552 0.2740934379398823 0.27749601919204 0.07767443032935262 0.5694699410349131 0.5549716085195542 \ --std 0.09101632762467489 0.09600705942721106 0.096193618606776 0.10371446736389771 0.10911951586604118 0.11043593115173281 0.12648042598739268 0.027746262217260665 0.06822348076384514 0.062377591186668725 \ --num_epochs 500 \ --train_batch_size 3 ``` 训练过程将自动开启边训边评估策略,并使用VisualDL保存训练日志,显示如下: 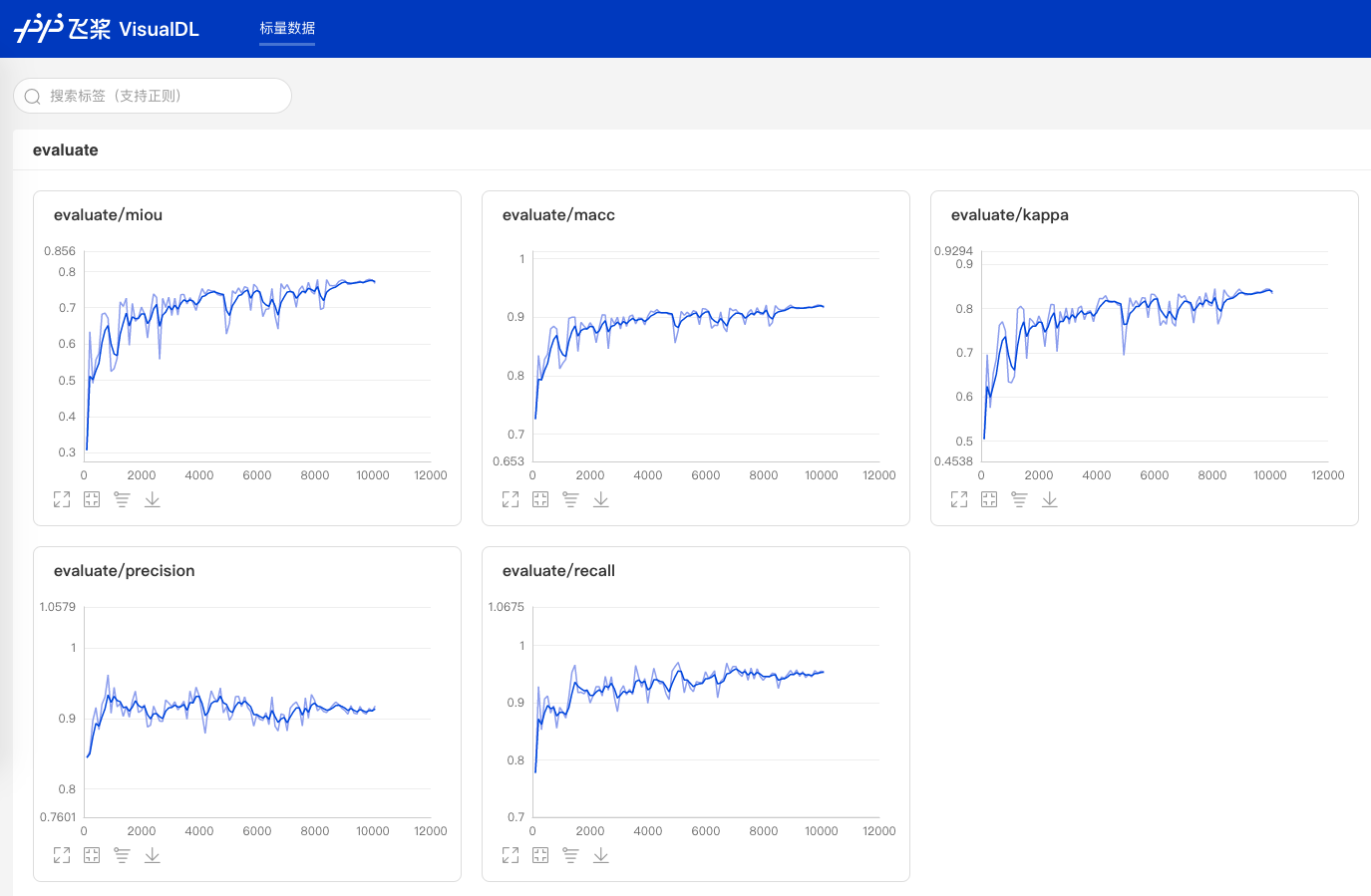 `mIoU`最高的模型将自动保存在`saved_model/remote_sensing_unet/best_model`目录下,最高mIoU=0.7782 ### 4. 模型预测 #### (1) 设置GPU卡号 ```shell script export CUDA_VISIBLE_DEVICES=0 ``` #### (2) 以刚训练好的U-Net最优模型为例,在RemoteSensing目录下运行`predict_demo.py`即可开始预测。 ```shell script python predict_demo.py --data_dir dataset/remote_sensing_seg/ \ --file_list val.txt \ --load_model_dir saved_model/remote_sensing_unet/best_model \ --save_img_dir saved_model/remote_sensing_unet/best_model/predict \ --color_map 255 255 255 0 0 0 0 255 255 0 0 255 150 150 150 ``` ### 5. 可视化 我们提供可视化API对预测效果进行直观的展示和对比。每张可视化图片包括彩色合成预览图、标注图、预测结果,使得效果好坏一目了然。 ```shell script python visualize_demo.py --data_dir dataset/remote_sensing_seg/ \ --file_list val.txt \ --pred_dir saved_model/remote_sensing_unet/best_model/predict \ --save_dir saved_model/remote_sensing_unet/best_model/vis_results ```` 3张可视化图片示例: 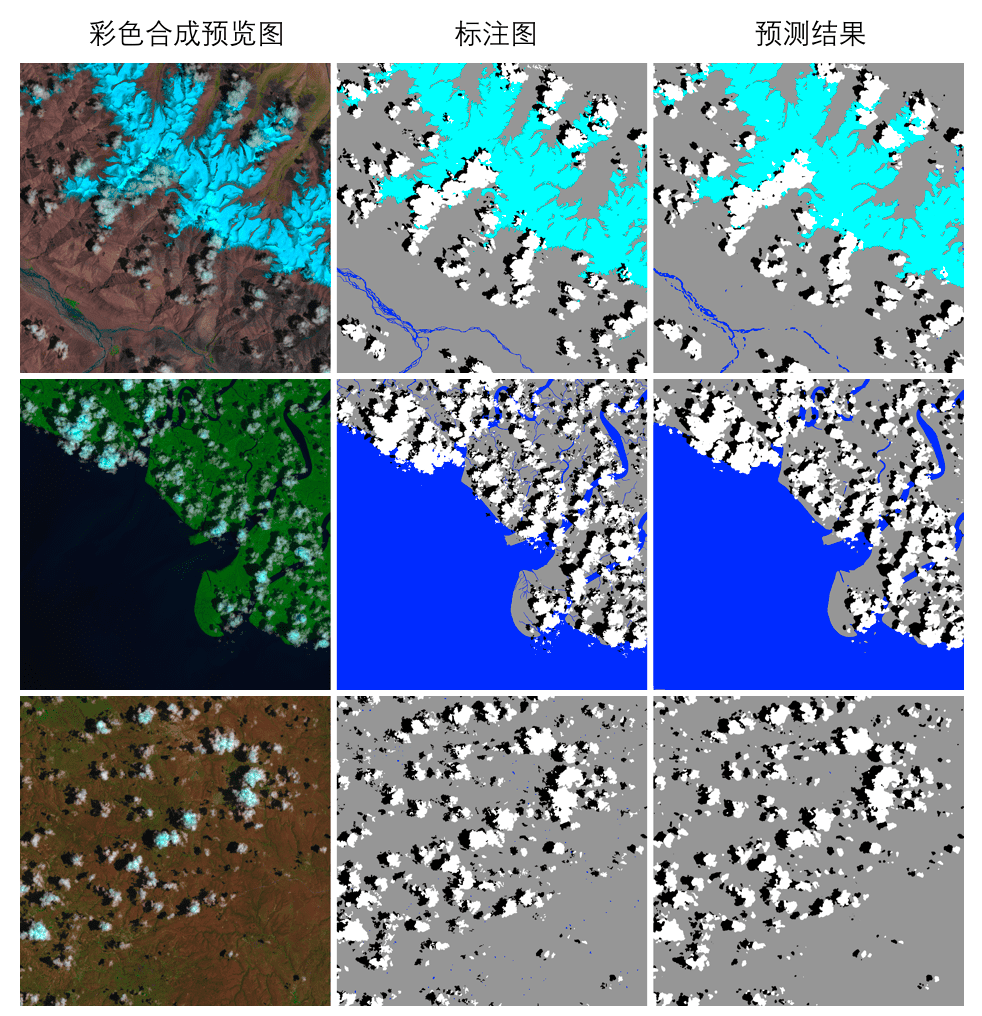 ## API说明 您可以使用`RemoteSensing`目录下提供的API构建自己的分割代码。 - [数据处理-transforms](docs/transforms.md)