Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
PaddlePaddle
PaddleSeg
提交
7835c042
P
PaddleSeg
项目概览
PaddlePaddle
/
PaddleSeg
通知
289
Star
8
Fork
1
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
53
列表
看板
标记
里程碑
合并请求
3
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
P
PaddleSeg
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
53
Issue
53
列表
看板
标记
里程碑
合并请求
3
合并请求
3
Pages
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
提交
Issue看板
提交
7835c042
编写于
5月 26, 2020
作者:
C
chenguowei01
浏览文件
操作
浏览文件
下载
差异文件
Merge branch 'develop' of
https://github.com/PaddlePaddle/PaddleSeg
into humanseg
上级
7781902e
f0dba857
变更
167
显示空白变更内容
内联
并排
Showing
167 changed file
with
3422 addition
and
1780 deletion
+3422
-1780
README.md
README.md
+1
-1
contrib/ACE2P/__init__.py
contrib/ACE2P/__init__.py
+14
-0
contrib/ACE2P/config.py
contrib/ACE2P/config.py
+17
-3
contrib/ACE2P/download_ACE2P.py
contrib/ACE2P/download_ACE2P.py
+4
-3
contrib/ACE2P/infer.py
contrib/ACE2P/infer.py
+37
-17
contrib/ACE2P/reader.py
contrib/ACE2P/reader.py
+31
-17
contrib/ACE2P/utils/__init__.py
contrib/ACE2P/utils/__init__.py
+14
-0
contrib/ACE2P/utils/palette.py
contrib/ACE2P/utils/palette.py
+1
-0
contrib/ACE2P/utils/util.py
contrib/ACE2P/utils/util.py
+22
-8
contrib/HumanSeg/datasets/__init__.py
contrib/HumanSeg/datasets/__init__.py
+4
-3
contrib/HumanSeg/datasets/dataset.py
contrib/HumanSeg/datasets/dataset.py
+2
-1
contrib/HumanSeg/datasets/shared_queue/__init__.py
contrib/HumanSeg/datasets/shared_queue/__init__.py
+2
-1
contrib/HumanSeg/datasets/shared_queue/queue.py
contrib/HumanSeg/datasets/shared_queue/queue.py
+2
-1
contrib/HumanSeg/datasets/shared_queue/sharedmemory.py
contrib/HumanSeg/datasets/shared_queue/sharedmemory.py
+2
-4
contrib/HumanSeg/export.py
contrib/HumanSeg/export.py
+15
-0
contrib/HumanSeg/infer.py
contrib/HumanSeg/infer.py
+15
-0
contrib/HumanSeg/models/__init__.py
contrib/HumanSeg/models/__init__.py
+15
-0
contrib/HumanSeg/models/humanseg.py
contrib/HumanSeg/models/humanseg.py
+69
-59
contrib/HumanSeg/models/load_model.py
contrib/HumanSeg/models/load_model.py
+13
-7
contrib/HumanSeg/nets/__init__.py
contrib/HumanSeg/nets/__init__.py
+15
-0
contrib/HumanSeg/nets/backbone/__init__.py
contrib/HumanSeg/nets/backbone/__init__.py
+15
-0
contrib/HumanSeg/nets/backbone/mobilenet_v2.py
contrib/HumanSeg/nets/backbone/mobilenet_v2.py
+3
-1
contrib/HumanSeg/nets/backbone/xception.py
contrib/HumanSeg/nets/backbone/xception.py
+1
-1
contrib/HumanSeg/nets/deeplabv3p.py
contrib/HumanSeg/nets/deeplabv3p.py
+1
-1
contrib/HumanSeg/nets/hrnet.py
contrib/HumanSeg/nets/hrnet.py
+1
-1
contrib/HumanSeg/nets/libs.py
contrib/HumanSeg/nets/libs.py
+1
-1
contrib/HumanSeg/nets/seg_modules.py
contrib/HumanSeg/nets/seg_modules.py
+2
-1
contrib/HumanSeg/nets/shufflenet_slim.py
contrib/HumanSeg/nets/shufflenet_slim.py
+15
-0
contrib/HumanSeg/pretrained_weights/download_pretrained_weights.py
...umanSeg/pretrained_weights/download_pretrained_weights.py
+4
-3
contrib/HumanSeg/quant_offline.py
contrib/HumanSeg/quant_offline.py
+15
-0
contrib/HumanSeg/quant_online.py
contrib/HumanSeg/quant_online.py
+15
-0
contrib/HumanSeg/requirements.txt
contrib/HumanSeg/requirements.txt
+1
-1
contrib/HumanSeg/train.py
contrib/HumanSeg/train.py
+15
-0
contrib/HumanSeg/transforms/__init__.py
contrib/HumanSeg/transforms/__init__.py
+4
-3
contrib/HumanSeg/transforms/functional.py
contrib/HumanSeg/transforms/functional.py
+4
-3
contrib/HumanSeg/transforms/transforms.py
contrib/HumanSeg/transforms/transforms.py
+4
-3
contrib/HumanSeg/utils/__init__.py
contrib/HumanSeg/utils/__init__.py
+4
-3
contrib/HumanSeg/utils/humanseg_postprocess.py
contrib/HumanSeg/utils/humanseg_postprocess.py
+15
-0
contrib/HumanSeg/utils/logging.py
contrib/HumanSeg/utils/logging.py
+2
-1
contrib/HumanSeg/utils/metrics.py
contrib/HumanSeg/utils/metrics.py
+1
-1
contrib/HumanSeg/utils/post_quantization.py
contrib/HumanSeg/utils/post_quantization.py
+2
-1
contrib/HumanSeg/utils/utils.py
contrib/HumanSeg/utils/utils.py
+5
-6
contrib/HumanSeg/val.py
contrib/HumanSeg/val.py
+15
-0
contrib/HumanSeg/video_infer.py
contrib/HumanSeg/video_infer.py
+15
-0
contrib/LaneNet/data_aug.py
contrib/LaneNet/data_aug.py
+4
-2
contrib/LaneNet/dataset/download_tusimple.py
contrib/LaneNet/dataset/download_tusimple.py
+4
-3
contrib/LaneNet/eval.py
contrib/LaneNet/eval.py
+5
-2
contrib/LaneNet/loss.py
contrib/LaneNet/loss.py
+30
-31
contrib/LaneNet/models/__init__.py
contrib/LaneNet/models/__init__.py
+1
-1
contrib/LaneNet/models/model_builder.py
contrib/LaneNet/models/model_builder.py
+1
-1
contrib/LaneNet/models/modeling/lanenet.py
contrib/LaneNet/models/modeling/lanenet.py
+179
-58
contrib/LaneNet/reader.py
contrib/LaneNet/reader.py
+21
-13
contrib/LaneNet/train.py
contrib/LaneNet/train.py
+13
-91
contrib/LaneNet/utils/__init__.py
contrib/LaneNet/utils/__init__.py
+14
-0
contrib/LaneNet/utils/config.py
contrib/LaneNet/utils/config.py
+6
-6
contrib/LaneNet/utils/dist_utils.py
contrib/LaneNet/utils/dist_utils.py
+10
-9
contrib/LaneNet/utils/generate_tusimple_dataset.py
contrib/LaneNet/utils/generate_tusimple_dataset.py
+65
-21
contrib/LaneNet/utils/lanenet_postprocess.py
contrib/LaneNet/utils/lanenet_postprocess.py
+75
-41
contrib/LaneNet/utils/load_model_utils.py
contrib/LaneNet/utils/load_model_utils.py
+126
-0
contrib/LaneNet/vis.py
contrib/LaneNet/vis.py
+21
-13
contrib/MechanicalIndustryMeter/download_mini_mechanical_industry_meter.py
...lIndustryMeter/download_mini_mechanical_industry_meter.py
+4
-3
contrib/MechanicalIndustryMeter/download_unet_mechanical_industry_meter.py
...lIndustryMeter/download_unet_mechanical_industry_meter.py
+6
-4
contrib/README.md
contrib/README.md
+9
-0
contrib/RemoteSensing/README.md
contrib/RemoteSensing/README.md
+25
-136
contrib/RemoteSensing/__init__.py
contrib/RemoteSensing/__init__.py
+4
-3
contrib/RemoteSensing/docs/imgs/rs.png
contrib/RemoteSensing/docs/imgs/rs.png
+0
-0
contrib/RemoteSensing/models/__init__.py
contrib/RemoteSensing/models/__init__.py
+16
-0
contrib/RemoteSensing/models/base.py
contrib/RemoteSensing/models/base.py
+403
-146
contrib/RemoteSensing/models/hrnet.py
contrib/RemoteSensing/models/hrnet.py
+154
-0
contrib/RemoteSensing/models/load_model.py
contrib/RemoteSensing/models/load_model.py
+7
-12
contrib/RemoteSensing/models/unet.py
contrib/RemoteSensing/models/unet.py
+45
-75
contrib/RemoteSensing/nets/__init__.py
contrib/RemoteSensing/nets/__init__.py
+16
-0
contrib/RemoteSensing/nets/hrnet.py
contrib/RemoteSensing/nets/hrnet.py
+455
-0
contrib/RemoteSensing/nets/libs.py
contrib/RemoteSensing/nets/libs.py
+1
-1
contrib/RemoteSensing/nets/loss.py
contrib/RemoteSensing/nets/loss.py
+2
-1
contrib/RemoteSensing/nets/unet.py
contrib/RemoteSensing/nets/unet.py
+1
-1
contrib/RemoteSensing/predict_demo.py
contrib/RemoteSensing/predict_demo.py
+73
-22
contrib/RemoteSensing/readers/__init__.py
contrib/RemoteSensing/readers/__init__.py
+2
-1
contrib/RemoteSensing/readers/base.py
contrib/RemoteSensing/readers/base.py
+2
-1
contrib/RemoteSensing/readers/reader.py
contrib/RemoteSensing/readers/reader.py
+2
-1
contrib/RemoteSensing/requirements.txt
contrib/RemoteSensing/requirements.txt
+1
-1
contrib/RemoteSensing/tools/create_dataset_list.py
contrib/RemoteSensing/tools/create_dataset_list.py
+1
-1
contrib/RemoteSensing/tools/split_dataset_list.py
contrib/RemoteSensing/tools/split_dataset_list.py
+1
-1
contrib/RemoteSensing/train_demo.py
contrib/RemoteSensing/train_demo.py
+42
-25
contrib/RemoteSensing/transforms/__init__.py
contrib/RemoteSensing/transforms/__init__.py
+4
-3
contrib/RemoteSensing/transforms/ops.py
contrib/RemoteSensing/transforms/ops.py
+2
-1
contrib/RemoteSensing/transforms/transforms.py
contrib/RemoteSensing/transforms/transforms.py
+1
-1
contrib/RemoteSensing/utils/__init__.py
contrib/RemoteSensing/utils/__init__.py
+4
-3
contrib/RemoteSensing/utils/logging.py
contrib/RemoteSensing/utils/logging.py
+2
-1
contrib/RemoteSensing/utils/metrics.py
contrib/RemoteSensing/utils/metrics.py
+12
-1
contrib/RemoteSensing/utils/pretrain_weights.py
contrib/RemoteSensing/utils/pretrain_weights.py
+15
-0
contrib/RemoteSensing/utils/utils.py
contrib/RemoteSensing/utils/utils.py
+5
-9
contrib/RoadLine/__init__.py
contrib/RoadLine/__init__.py
+14
-0
contrib/RoadLine/config.py
contrib/RoadLine/config.py
+20
-6
contrib/RoadLine/download_RoadLine.py
contrib/RoadLine/download_RoadLine.py
+4
-3
contrib/RoadLine/infer.py
contrib/RoadLine/infer.py
+39
-19
contrib/RoadLine/utils/__init__.py
contrib/RoadLine/utils/__init__.py
+14
-0
contrib/RoadLine/utils/palette.py
contrib/RoadLine/utils/palette.py
+15
-9
contrib/RoadLine/utils/util.py
contrib/RoadLine/utils/util.py
+22
-8
dataset/convert_voc2012.py
dataset/convert_voc2012.py
+11
-6
dataset/download_and_convert_voc2012.py
dataset/download_and_convert_voc2012.py
+9
-8
dataset/download_cityscapes.py
dataset/download_cityscapes.py
+4
-3
dataset/download_mini_deepglobe_road_extraction.py
dataset/download_mini_deepglobe_road_extraction.py
+4
-3
dataset/download_optic.py
dataset/download_optic.py
+4
-3
dataset/download_pet.py
dataset/download_pet.py
+4
-3
deploy/python/README.md
deploy/python/README.md
+2
-5
deploy/python/infer.py
deploy/python/infer.py
+10
-6
docs/annotation/jingling2seg.md
docs/annotation/jingling2seg.md
+7
-13
docs/annotation/labelme2seg.md
docs/annotation/labelme2seg.md
+10
-16
docs/annotation/labelme_demo/annotations/2011_000025.png
docs/annotation/labelme_demo/annotations/2011_000025.png
+0
-0
pdseg/__init__.py
pdseg/__init__.py
+2
-2
pdseg/check.py
pdseg/check.py
+21
-3
pdseg/data_aug.py
pdseg/data_aug.py
+3
-3
pdseg/data_utils.py
pdseg/data_utils.py
+16
-2
pdseg/eval.py
pdseg/eval.py
+5
-6
pdseg/export_model.py
pdseg/export_model.py
+12
-6
pdseg/loss.py
pdseg/loss.py
+1
-1
pdseg/lovasz_losses.py
pdseg/lovasz_losses.py
+1
-1
pdseg/metrics.py
pdseg/metrics.py
+1
-1
pdseg/models/__init__.py
pdseg/models/__init__.py
+1
-1
pdseg/models/backbone/__init__.py
pdseg/models/backbone/__init__.py
+14
-0
pdseg/models/backbone/mobilenet_v2.py
pdseg/models/backbone/mobilenet_v2.py
+1
-1
pdseg/models/backbone/resnet.py
pdseg/models/backbone/resnet.py
+15
-13
pdseg/models/backbone/vgg.py
pdseg/models/backbone/vgg.py
+3
-2
pdseg/models/backbone/xception.py
pdseg/models/backbone/xception.py
+1
-1
pdseg/models/libs/__init__.py
pdseg/models/libs/__init__.py
+14
-0
pdseg/models/libs/model_libs.py
pdseg/models/libs/model_libs.py
+2
-2
pdseg/models/model_builder.py
pdseg/models/model_builder.py
+4
-78
pdseg/models/modeling/__init__.py
pdseg/models/modeling/__init__.py
+14
-0
pdseg/models/modeling/deeplab.py
pdseg/models/modeling/deeplab.py
+1
-1
pdseg/models/modeling/fast_scnn.py
pdseg/models/modeling/fast_scnn.py
+78
-37
pdseg/models/modeling/hrnet.py
pdseg/models/modeling/hrnet.py
+153
-52
pdseg/models/modeling/icnet.py
pdseg/models/modeling/icnet.py
+1
-1
pdseg/models/modeling/pspnet.py
pdseg/models/modeling/pspnet.py
+37
-34
pdseg/models/modeling/unet.py
pdseg/models/modeling/unet.py
+1
-1
pdseg/reader.py
pdseg/reader.py
+5
-3
pdseg/solver.py
pdseg/solver.py
+1
-1
pdseg/tools/__init__.py
pdseg/tools/__init__.py
+1
-1
pdseg/tools/create_dataset_list.py
pdseg/tools/create_dataset_list.py
+21
-26
pdseg/tools/gray2pseudo_color.py
pdseg/tools/gray2pseudo_color.py
+21
-11
pdseg/tools/jingling2seg.py
pdseg/tools/jingling2seg.py
+18
-6
pdseg/tools/labelme2seg.py
pdseg/tools/labelme2seg.py
+42
-7
pdseg/train.py
pdseg/train.py
+22
-108
pdseg/utils/__init__.py
pdseg/utils/__init__.py
+14
-0
pdseg/utils/collect.py
pdseg/utils/collect.py
+14
-9
pdseg/utils/config.py
pdseg/utils/config.py
+4
-4
pdseg/utils/dist_utils.py
pdseg/utils/dist_utils.py
+1
-1
pdseg/utils/fp16_utils.py
pdseg/utils/fp16_utils.py
+17
-1
pdseg/utils/load_model_utils.py
pdseg/utils/load_model_utils.py
+128
-0
pdseg/utils/timer.py
pdseg/utils/timer.py
+4
-3
pdseg/vis.py
pdseg/vis.py
+14
-16
pretrained_model/download_model.py
pretrained_model/download_model.py
+5
-4
slim/distillation/model_builder.py
slim/distillation/model_builder.py
+1
-1
slim/distillation/train_distill.py
slim/distillation/train_distill.py
+31
-107
slim/nas/deeplab.py
slim/nas/deeplab.py
+7
-4
slim/nas/eval_nas.py
slim/nas/eval_nas.py
+5
-2
slim/nas/mobilenetv2_search_space.py
slim/nas/mobilenetv2_search_space.py
+10
-9
slim/nas/model_builder.py
slim/nas/model_builder.py
+1
-1
slim/nas/train_nas.py
slim/nas/train_nas.py
+14
-90
slim/prune/eval_prune.py
slim/prune/eval_prune.py
+1
-1
slim/prune/train_prune.py
slim/prune/train_prune.py
+11
-53
slim/quantization/eval_quant.py
slim/quantization/eval_quant.py
+1
-1
slim/quantization/export_model.py
slim/quantization/export_model.py
+1
-1
slim/quantization/train_quant.py
slim/quantization/train_quant.py
+53
-38
test/local_test_cityscapes.py
test/local_test_cityscapes.py
+4
-3
test/local_test_pet.py
test/local_test_pet.py
+4
-3
test/test_utils.py
test/test_utils.py
+4
-3
未找到文件。
README.md
浏览文件 @
7835c042
...
@@ -35,7 +35,7 @@ PaddleSeg是基于[PaddlePaddle](https://www.paddlepaddle.org.cn)开发的端到
...
@@ -35,7 +35,7 @@ PaddleSeg是基于[PaddlePaddle](https://www.paddlepaddle.org.cn)开发的端到
-
**高性能**
-
**高性能**
PaddleSeg支持多进程I/O、多卡并行
、跨卡Batch Norm同步
等训练加速策略,结合飞桨核心框架的显存优化功能,可大幅度减少分割模型的显存开销,让开发者更低成本、更高效地完成图像分割训练。
PaddleSeg支持多进程I/O、多卡并行等训练加速策略,结合飞桨核心框架的显存优化功能,可大幅度减少分割模型的显存开销,让开发者更低成本、更高效地完成图像分割训练。
-
**工业级部署**
-
**工业级部署**
...
...
contrib/ACE2P/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
contrib/ACE2P/config.py
浏览文件 @
7835c042
# -*- coding: utf-8 -*-
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
utils.util
import
AttrDict
,
merge_cfg_from_args
,
get_arguments
from
utils.util
import
AttrDict
,
merge_cfg_from_args
,
get_arguments
import
os
import
os
...
@@ -22,7 +36,7 @@ cfg.MEAN = 0.406, 0.456, 0.485
...
@@ -22,7 +36,7 @@ cfg.MEAN = 0.406, 0.456, 0.485
cfg
.
STD
=
0.225
,
0.224
,
0.229
cfg
.
STD
=
0.225
,
0.224
,
0.229
# 多尺度预测时图像尺寸
# 多尺度预测时图像尺寸
cfg
.
multi_scales
=
(
377
,
377
),
(
473
,
473
),
(
567
,
567
)
cfg
.
multi_scales
=
(
377
,
377
),
(
473
,
473
),
(
567
,
567
)
# 多尺度预测时图像是否水平翻转
# 多尺度预测时图像是否水平翻转
cfg
.
flip
=
True
cfg
.
flip
=
True
...
...
contrib/ACE2P/download_ACE2P.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/ACE2P/infer.py
浏览文件 @
7835c042
# -*- coding: utf-8 -*-
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os
import
os
import
cv2
import
cv2
import
numpy
as
np
import
numpy
as
np
...
@@ -12,10 +26,11 @@ config = importlib.import_module('config')
...
@@ -12,10 +26,11 @@ config = importlib.import_module('config')
cfg
=
getattr
(
config
,
'cfg'
)
cfg
=
getattr
(
config
,
'cfg'
)
# paddle垃圾回收策略FLAG,ACE2P模型较大,当显存不够时建议开启
# paddle垃圾回收策略FLAG,ACE2P模型较大,当显存不够时建议开启
os
.
environ
[
'FLAGS_eager_delete_tensor_gb'
]
=
'0.0'
os
.
environ
[
'FLAGS_eager_delete_tensor_gb'
]
=
'0.0'
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
# 预测数据集类
# 预测数据集类
class
TestDataSet
():
class
TestDataSet
():
def
__init__
(
self
):
def
__init__
(
self
):
...
@@ -56,10 +71,10 @@ class TestDataSet():
...
@@ -56,10 +71,10 @@ class TestDataSet():
img_path
=
self
.
data_list
[
index
]
img_path
=
self
.
data_list
[
index
]
img
=
cv2
.
imread
(
img_path
,
cv2
.
IMREAD_COLOR
)
img
=
cv2
.
imread
(
img_path
,
cv2
.
IMREAD_COLOR
)
if
img
is
None
:
if
img
is
None
:
return
img
,
img
,
img_path
,
None
return
img
,
img
,
img_path
,
None
img_name
=
img_path
.
split
(
os
.
sep
)[
-
1
]
img_name
=
img_path
.
split
(
os
.
sep
)[
-
1
]
name_prefix
=
img_name
.
replace
(
'.'
+
img_name
.
split
(
'.'
)[
-
1
],
''
)
name_prefix
=
img_name
.
replace
(
'.'
+
img_name
.
split
(
'.'
)[
-
1
],
''
)
img_shape
=
img
.
shape
[:
2
]
img_shape
=
img
.
shape
[:
2
]
img_process
=
self
.
preprocess
(
img
)
img_process
=
self
.
preprocess
(
img
)
...
@@ -96,22 +111,27 @@ def infer():
...
@@ -96,22 +111,27 @@ def infer():
# ACE2P模型使用多尺度预测
# ACE2P模型使用多尺度预测
reader
=
importlib
.
import_module
(
'reader'
)
reader
=
importlib
.
import_module
(
'reader'
)
multi_scale_test
=
getattr
(
reader
,
'multi_scale_test'
)
multi_scale_test
=
getattr
(
reader
,
'multi_scale_test'
)
parsing
,
logits
=
multi_scale_test
(
exe
,
test_prog
,
feed_name
,
fetch_list
,
image
,
im_shape
)
parsing
,
logits
=
multi_scale_test
(
exe
,
test_prog
,
feed_name
,
fetch_list
,
image
,
im_shape
)
else
:
else
:
# HumanSeg,RoadLine模型单尺度预测
# HumanSeg,RoadLine模型单尺度预测
result
=
exe
.
run
(
program
=
test_prog
,
feed
=
{
feed_name
[
0
]:
image
},
fetch_list
=
fetch_list
)
result
=
exe
.
run
(
program
=
test_prog
,
feed
=
{
feed_name
[
0
]:
image
},
fetch_list
=
fetch_list
)
parsing
=
np
.
argmax
(
result
[
0
][
0
],
axis
=
0
)
parsing
=
np
.
argmax
(
result
[
0
][
0
],
axis
=
0
)
parsing
=
cv2
.
resize
(
parsing
.
astype
(
np
.
uint8
),
im_shape
[::
-
1
])
parsing
=
cv2
.
resize
(
parsing
.
astype
(
np
.
uint8
),
im_shape
[::
-
1
])
# 预测结果保存
# 预测结果保存
result_path
=
os
.
path
.
join
(
cfg
.
vis_dir
,
im_name
+
'.png'
)
result_path
=
os
.
path
.
join
(
cfg
.
vis_dir
,
im_name
+
'.png'
)
if
cfg
.
example
==
'HumanSeg'
:
if
cfg
.
example
==
'HumanSeg'
:
logits
=
result
[
0
][
0
][
1
]
*
255
logits
=
result
[
0
][
0
][
1
]
*
255
logits
=
cv2
.
resize
(
logits
,
im_shape
[::
-
1
])
logits
=
cv2
.
resize
(
logits
,
im_shape
[::
-
1
])
ret
,
logits
=
cv2
.
threshold
(
logits
,
thresh
,
0
,
cv2
.
THRESH_TOZERO
)
ret
,
logits
=
cv2
.
threshold
(
logits
,
thresh
,
0
,
cv2
.
THRESH_TOZERO
)
logits
=
255
*
(
logits
-
thresh
)
/
(
255
-
thresh
)
logits
=
255
*
(
logits
-
thresh
)
/
(
255
-
thresh
)
# 将分割结果添加到alpha通道
# 将分割结果添加到alpha通道
rgba
=
np
.
concatenate
((
ori_img
,
np
.
expand_dims
(
logits
,
axis
=
2
)),
axis
=
2
)
rgba
=
np
.
concatenate
((
ori_img
,
np
.
expand_dims
(
logits
,
axis
=
2
)),
axis
=
2
)
cv2
.
imwrite
(
result_path
,
rgba
)
cv2
.
imwrite
(
result_path
,
rgba
)
else
:
else
:
output_im
=
PILImage
.
fromarray
(
np
.
asarray
(
parsing
,
dtype
=
np
.
uint8
))
output_im
=
PILImage
.
fromarray
(
np
.
asarray
(
parsing
,
dtype
=
np
.
uint8
))
...
...
contrib/ACE2P/reader.py
浏览文件 @
7835c042
# -*- coding: utf-8 -*-
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
numpy
as
np
import
numpy
as
np
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
from
config
import
cfg
from
config
import
cfg
import
cv2
import
cv2
def
get_affine_points
(
src_shape
,
dst_shape
,
rot_grad
=
0
):
def
get_affine_points
(
src_shape
,
dst_shape
,
rot_grad
=
0
):
# 获取图像和仿射后图像的三组对应点坐标
# 获取图像和仿射后图像的三组对应点坐标
# 三组点为仿射变换后图像的中心点, [w/2,0], [0,0],及对应原始图像的点
# 三组点为仿射变换后图像的中心点, [w/2,0], [0,0],及对应原始图像的点
...
@@ -34,6 +49,7 @@ def get_affine_points(src_shape, dst_shape, rot_grad=0):
...
@@ -34,6 +49,7 @@ def get_affine_points(src_shape, dst_shape, rot_grad=0):
return
points
,
points_trans
return
points
,
points_trans
def
preprocess
(
im
):
def
preprocess
(
im
):
# ACE2P模型数据预处理
# ACE2P模型数据预处理
im_shape
=
im
.
shape
[:
2
]
im_shape
=
im
.
shape
[:
2
]
...
@@ -42,13 +58,10 @@ def preprocess(im):
...
@@ -42,13 +58,10 @@ def preprocess(im):
# 获取图像和仿射变换后图像的对应点坐标
# 获取图像和仿射变换后图像的对应点坐标
points
,
points_trans
=
get_affine_points
(
im_shape
,
scale
)
points
,
points_trans
=
get_affine_points
(
im_shape
,
scale
)
# 根据对应点集获得仿射矩阵
# 根据对应点集获得仿射矩阵
trans
=
cv2
.
getAffineTransform
(
np
.
float32
(
points
),
trans
=
cv2
.
getAffineTransform
(
np
.
float32
(
points_trans
))
np
.
float32
(
points
),
np
.
float32
(
points_trans
))
# 根据仿射矩阵对图像进行仿射
# 根据仿射矩阵对图像进行仿射
input
=
cv2
.
warpAffine
(
im
,
input
=
cv2
.
warpAffine
(
im
,
trans
,
scale
[::
-
1
],
flags
=
cv2
.
INTER_LINEAR
)
trans
,
scale
[::
-
1
],
flags
=
cv2
.
INTER_LINEAR
)
# 减均值测,除以方差,转换数据格式为NCHW
# 减均值测,除以方差,转换数据格式为NCHW
input
=
input
.
astype
(
np
.
float32
)
input
=
input
.
astype
(
np
.
float32
)
...
@@ -66,8 +79,8 @@ def preprocess(im):
...
@@ -66,8 +79,8 @@ def preprocess(im):
return
input_images
return
input_images
def
multi_scale_test
(
exe
,
test_prog
,
feed_name
,
fetch_list
,
def
multi_scale_test
(
exe
,
test_prog
,
feed_name
,
fetch_list
,
input_ims
,
input_ims
,
im_shape
):
im_shape
):
# 由于部分类别分左右部位, flipped_idx为其水平翻转后对应的标签
# 由于部分类别分左右部位, flipped_idx为其水平翻转后对应的标签
flipped_idx
=
(
15
,
14
,
17
,
16
,
19
,
18
)
flipped_idx
=
(
15
,
14
,
17
,
16
,
19
,
18
)
...
@@ -76,7 +89,8 @@ def multi_scale_test(exe, test_prog, feed_name, fetch_list,
...
@@ -76,7 +89,8 @@ def multi_scale_test(exe, test_prog, feed_name, fetch_list,
# 多尺度预测
# 多尺度预测
for
idx
,
scale
in
enumerate
(
cfg
.
multi_scales
):
for
idx
,
scale
in
enumerate
(
cfg
.
multi_scales
):
input_im
=
input_ims
[
idx
]
input_im
=
input_ims
[
idx
]
parsing_output
=
exe
.
run
(
program
=
test_prog
,
parsing_output
=
exe
.
run
(
program
=
test_prog
,
feed
=
{
feed_name
[
0
]:
input_im
},
feed
=
{
feed_name
[
0
]:
input_im
},
fetch_list
=
fetch_list
)
fetch_list
=
fetch_list
)
output
=
parsing_output
[
0
][
0
]
output
=
parsing_output
[
0
][
0
]
...
@@ -92,7 +106,8 @@ def multi_scale_test(exe, test_prog, feed_name, fetch_list,
...
@@ -92,7 +106,8 @@ def multi_scale_test(exe, test_prog, feed_name, fetch_list,
# 仿射变换回图像原始尺寸
# 仿射变换回图像原始尺寸
points
,
points_trans
=
get_affine_points
(
im_shape
,
scale
)
points
,
points_trans
=
get_affine_points
(
im_shape
,
scale
)
M
=
cv2
.
getAffineTransform
(
np
.
float32
(
points_trans
),
np
.
float32
(
points
))
M
=
cv2
.
getAffineTransform
(
np
.
float32
(
points_trans
),
np
.
float32
(
points
))
logits_result
=
cv2
.
warpAffine
(
output
,
M
,
im_shape
[::
-
1
],
flags
=
cv2
.
INTER_LINEAR
)
logits_result
=
cv2
.
warpAffine
(
output
,
M
,
im_shape
[::
-
1
],
flags
=
cv2
.
INTER_LINEAR
)
ms_outputs
.
append
(
logits_result
)
ms_outputs
.
append
(
logits_result
)
# 多尺度预测结果求均值,求预测概率最大的类别
# 多尺度预测结果求均值,求预测概率最大的类别
...
@@ -100,4 +115,3 @@ def multi_scale_test(exe, test_prog, feed_name, fetch_list,
...
@@ -100,4 +115,3 @@ def multi_scale_test(exe, test_prog, feed_name, fetch_list,
ms_fused_parsing_output
=
np
.
mean
(
ms_fused_parsing_output
,
axis
=
0
)
ms_fused_parsing_output
=
np
.
mean
(
ms_fused_parsing_output
,
axis
=
0
)
parsing
=
np
.
argmax
(
ms_fused_parsing_output
,
axis
=
2
)
parsing
=
np
.
argmax
(
ms_fused_parsing_output
,
axis
=
2
)
return
parsing
,
ms_fused_parsing_output
return
parsing
,
ms_fused_parsing_output
contrib/ACE2P/utils/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
contrib/ACE2P/utils/palette.py
浏览文件 @
7835c042
...
@@ -7,6 +7,7 @@
...
@@ -7,6 +7,7 @@
## This source code is licensed under the MIT-style license found in the
## This source code is licensed under the MIT-style license found in the
## LICENSE file in the root directory of this source tree
## LICENSE file in the root directory of this source tree
##+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
##+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
from
__future__
import
print_function
from
__future__
import
print_function
...
...
contrib/ACE2P/utils/util.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
division
from
__future__
import
division
from
__future__
import
print_function
from
__future__
import
print_function
from
__future__
import
unicode_literals
from
__future__
import
unicode_literals
import
argparse
import
argparse
import
os
import
os
def
get_arguments
():
def
get_arguments
():
parser
=
argparse
.
ArgumentParser
()
parser
=
argparse
.
ArgumentParser
()
parser
.
add_argument
(
"--use_gpu"
,
parser
.
add_argument
(
action
=
"store_true"
,
"--use_gpu"
,
action
=
"store_true"
,
help
=
"Use gpu or cpu to test."
)
help
=
"Use gpu or cpu to test."
)
parser
.
add_argument
(
parser
.
add_argument
(
'--example'
,
'--example'
,
type
=
str
,
help
=
'RoadLine, HumanSeg or ACE2P'
)
type
=
str
,
help
=
'RoadLine, HumanSeg or ACE2P'
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
...
@@ -34,6 +48,7 @@ class AttrDict(dict):
...
@@ -34,6 +48,7 @@ class AttrDict(dict):
else
:
else
:
self
[
name
]
=
value
self
[
name
]
=
value
def
merge_cfg_from_args
(
args
,
cfg
):
def
merge_cfg_from_args
(
args
,
cfg
):
"""Merge config keys, values in args into the global config."""
"""Merge config keys, values in args into the global config."""
for
k
,
v
in
vars
(
args
).
items
():
for
k
,
v
in
vars
(
args
).
items
():
...
@@ -44,4 +59,3 @@ def merge_cfg_from_args(args, cfg):
...
@@ -44,4 +59,3 @@ def merge_cfg_from_args(args, cfg):
value
=
v
value
=
v
if
value
is
not
None
:
if
value
is
not
None
:
cfg
[
k
]
=
value
cfg
[
k
]
=
value
contrib/HumanSeg/datasets/__init__.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/HumanSeg/datasets/dataset.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/datasets/shared_queue/__init__.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/datasets/shared_queue/queue.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/datasets/shared_queue/sharedmemory.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -12,9 +13,6 @@
...
@@ -12,9 +13,6 @@
# See the License for the specific language governing permissions and
# See the License for the specific language governing permissions and
# limitations under the License.
# limitations under the License.
# utils for memory management which is allocated on sharedmemory,
# note that these structures may not be thread-safe
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
from
__future__
import
print_function
from
__future__
import
print_function
...
...
contrib/HumanSeg/export.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
models
import
models
import
argparse
import
argparse
...
...
contrib/HumanSeg/infer.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
argparse
import
argparse
import
os
import
os
import
os.path
as
osp
import
os.path
as
osp
...
...
contrib/HumanSeg/models/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
.humanseg
import
HumanSegMobile
from
.humanseg
import
HumanSegMobile
from
.humanseg
import
HumanSegServer
from
.humanseg
import
HumanSegServer
from
.humanseg
import
HumanSegLite
from
.humanseg
import
HumanSegLite
...
...
contrib/HumanSeg/models/humanseg.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -24,6 +25,7 @@ import time
...
@@ -24,6 +25,7 @@ import time
import
tqdm
import
tqdm
import
cv2
import
cv2
import
yaml
import
yaml
import
shutil
import
paddleslim
as
slim
import
paddleslim
as
slim
import
utils
import
utils
...
@@ -102,7 +104,7 @@ class SegModel(object):
...
@@ -102,7 +104,7 @@ class SegModel(object):
# 当前模型状态
# 当前模型状态
self
.
status
=
'Normal'
self
.
status
=
'Normal'
def
_get_single_car_bs
(
self
,
batch_size
):
def
_get_single_car
d
_bs
(
self
,
batch_size
):
if
batch_size
%
len
(
self
.
places
)
==
0
:
if
batch_size
%
len
(
self
.
places
)
==
0
:
return
int
(
batch_size
//
len
(
self
.
places
))
return
int
(
batch_size
//
len
(
self
.
places
))
else
:
else
:
...
@@ -144,7 +146,7 @@ class SegModel(object):
...
@@ -144,7 +146,7 @@ class SegModel(object):
capacity
=
64
,
capacity
=
64
,
use_double_buffer
=
True
,
use_double_buffer
=
True
,
iterable
=
True
)
iterable
=
True
)
batch_size_each_gpu
=
self
.
_get_single_car_bs
(
batch_size
)
batch_size_each_gpu
=
self
.
_get_single_car
d
_bs
(
batch_size
)
self
.
train_data_loader
.
set_sample_list_generator
(
self
.
train_data_loader
.
set_sample_list_generator
(
dataset
.
generator
(
batch_size
=
batch_size_each_gpu
),
dataset
.
generator
(
batch_size
=
batch_size_each_gpu
),
places
=
self
.
places
)
places
=
self
.
places
)
...
@@ -242,30 +244,11 @@ class SegModel(object):
...
@@ -242,30 +244,11 @@ class SegModel(object):
if
self
.
status
==
'Normal'
:
if
self
.
status
==
'Normal'
:
fluid
.
save
(
self
.
train_prog
,
osp
.
join
(
save_dir
,
'model'
))
fluid
.
save
(
self
.
train_prog
,
osp
.
join
(
save_dir
,
'model'
))
model_info
[
'status'
]
=
'Normal'
elif
self
.
status
==
'Quant'
:
elif
self
.
status
==
'Quant'
:
float_prog
,
_
=
slim
.
quant
.
convert
(
fluid
.
save
(
self
.
test_prog
,
osp
.
join
(
save_dir
,
'model'
))
self
.
test_prog
,
self
.
exe
.
place
,
save_int8
=
True
)
model_info
[
'status'
]
=
'QuantOnline'
test_input_names
=
[
var
.
name
for
var
in
list
(
self
.
test_inputs
.
values
())
]
test_outputs
=
list
(
self
.
test_outputs
.
values
())
fluid
.
io
.
save_inference_model
(
dirname
=
save_dir
,
executor
=
self
.
exe
,
params_filename
=
'__params__'
,
feeded_var_names
=
test_input_names
,
target_vars
=
test_outputs
,
main_program
=
float_prog
)
model_info
[
'_ModelInputsOutputs'
]
=
dict
()
model_info
[
'_ModelInputsOutputs'
][
'test_inputs'
]
=
[
[
k
,
v
.
name
]
for
k
,
v
in
self
.
test_inputs
.
items
()
]
model_info
[
'_ModelInputsOutputs'
][
'test_outputs'
]
=
[
[
k
,
v
.
name
]
for
k
,
v
in
self
.
test_outputs
.
items
()
]
model_info
[
'status'
]
=
self
.
status
with
open
(
with
open
(
osp
.
join
(
save_dir
,
'model.yml'
),
encoding
=
'utf-8'
,
osp
.
join
(
save_dir
,
'model.yml'
),
encoding
=
'utf-8'
,
mode
=
'w'
)
as
f
:
mode
=
'w'
)
as
f
:
...
@@ -307,18 +290,20 @@ class SegModel(object):
...
@@ -307,18 +290,20 @@ class SegModel(object):
logging
.
info
(
"Model for inference deploy saved in {}."
.
format
(
save_dir
))
logging
.
info
(
"Model for inference deploy saved in {}."
.
format
(
save_dir
))
def
export_quant_model
(
self
,
def
export_quant_model
(
self
,
dataset
,
dataset
=
None
,
save_dir
,
save_dir
=
None
,
batch_size
=
1
,
batch_size
=
1
,
batch_nums
=
10
,
batch_nums
=
10
,
cache_dir
=
"./.temp"
):
cache_dir
=
".temp"
,
quant_type
=
"offline"
):
if
quant_type
==
"offline"
:
self
.
arrange_transform
(
transforms
=
dataset
.
transforms
,
mode
=
'quant'
)
self
.
arrange_transform
(
transforms
=
dataset
.
transforms
,
mode
=
'quant'
)
dataset
.
num_samples
=
batch_size
*
batch_nums
dataset
.
num_samples
=
batch_size
*
batch_nums
try
:
try
:
from
utils
import
HumanSegPostTrainingQuantization
from
utils
import
HumanSegPostTrainingQuantization
except
:
except
:
raise
Exception
(
raise
Exception
(
"Model Quantization is not available, try to upgrade your paddlepaddle>=1.7.0
"
"Model Quantization is not available, try to upgrade your paddlepaddle>=1.8.1
"
)
)
is_use_cache_file
=
True
is_use_cache_file
=
True
if
cache_dir
is
None
:
if
cache_dir
is
None
:
...
@@ -340,7 +325,22 @@ class SegModel(object):
...
@@ -340,7 +325,22 @@ class SegModel(object):
post_training_quantization
.
quantize
()
post_training_quantization
.
quantize
()
post_training_quantization
.
save_quantized_model
(
save_dir
)
post_training_quantization
.
save_quantized_model
(
save_dir
)
if
cache_dir
is
not
None
:
if
cache_dir
is
not
None
:
os
.
system
(
'rm -r'
+
cache_dir
)
shutil
.
rmtree
(
cache_dir
)
else
:
float_prog
,
_
=
slim
.
quant
.
convert
(
self
.
test_prog
,
self
.
exe
.
place
,
save_int8
=
True
)
test_input_names
=
[
var
.
name
for
var
in
list
(
self
.
test_inputs
.
values
())
]
test_outputs
=
list
(
self
.
test_outputs
.
values
())
fluid
.
io
.
save_inference_model
(
dirname
=
save_dir
,
executor
=
self
.
exe
,
params_filename
=
'__params__'
,
feeded_var_names
=
test_input_names
,
target_vars
=
test_outputs
,
main_program
=
float_prog
)
model_info
=
self
.
get_model_info
()
model_info
=
self
.
get_model_info
()
model_info
[
'status'
]
=
'Quant'
model_info
[
'status'
]
=
'Quant'
...
@@ -592,6 +592,16 @@ class SegModel(object):
...
@@ -592,6 +592,16 @@ class SegModel(object):
'Current evaluated best model in eval_dataset is epoch_{}, miou={}'
'Current evaluated best model in eval_dataset is epoch_{}, miou={}'
.
format
(
best_model_epoch
,
best_miou
))
.
format
(
best_model_epoch
,
best_miou
))
if
quant
:
if
osp
.
exists
(
osp
.
join
(
save_dir
,
"best_model"
)):
fluid
.
load
(
program
=
self
.
test_prog
,
model_path
=
osp
.
join
(
save_dir
,
"best_model"
),
executor
=
self
.
exe
)
self
.
export_quant_model
(
save_dir
=
osp
.
join
(
save_dir
,
"best_model_export"
),
quant_type
=
"online"
)
def
evaluate
(
self
,
eval_dataset
,
batch_size
=
1
,
epoch_id
=
None
):
def
evaluate
(
self
,
eval_dataset
,
batch_size
=
1
,
epoch_id
=
None
):
"""评估。
"""评估。
...
...
contrib/HumanSeg/models/load_model.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -24,7 +25,7 @@ import models
...
@@ -24,7 +25,7 @@ import models
def
load_model
(
model_dir
):
def
load_model
(
model_dir
):
if
not
osp
.
exists
(
osp
.
join
(
model_dir
,
"model.yml"
)):
if
not
osp
.
exists
(
osp
.
join
(
model_dir
,
"model.yml"
)):
raise
Exception
(
"There's no
t
model.yml in {}"
.
format
(
model_dir
))
raise
Exception
(
"There's no model.yml in {}"
.
format
(
model_dir
))
with
open
(
osp
.
join
(
model_dir
,
"model.yml"
))
as
f
:
with
open
(
osp
.
join
(
model_dir
,
"model.yml"
))
as
f
:
info
=
yaml
.
load
(
f
.
read
(),
Loader
=
yaml
.
Loader
)
info
=
yaml
.
load
(
f
.
read
(),
Loader
=
yaml
.
Loader
)
status
=
info
[
'status'
]
status
=
info
[
'status'
]
...
@@ -33,7 +34,7 @@ def load_model(model_dir):
...
@@ -33,7 +34,7 @@ def load_model(model_dir):
raise
Exception
(
"There's no attribute {} in models"
.
format
(
raise
Exception
(
"There's no attribute {} in models"
.
format
(
info
[
'Model'
]))
info
[
'Model'
]))
model
=
getattr
(
models
,
info
[
'Model'
])(
**
info
[
'_init_params'
])
model
=
getattr
(
models
,
info
[
'Model'
])(
**
info
[
'_init_params'
])
if
status
==
"Normal"
:
if
status
in
[
"Normal"
,
"QuantOnline"
]
:
startup_prog
=
fluid
.
Program
()
startup_prog
=
fluid
.
Program
()
model
.
test_prog
=
fluid
.
Program
()
model
.
test_prog
=
fluid
.
Program
()
with
fluid
.
program_guard
(
model
.
test_prog
,
startup_prog
):
with
fluid
.
program_guard
(
model
.
test_prog
,
startup_prog
):
...
@@ -41,11 +42,16 @@ def load_model(model_dir):
...
@@ -41,11 +42,16 @@ def load_model(model_dir):
model
.
test_inputs
,
model
.
test_outputs
=
model
.
build_net
(
model
.
test_inputs
,
model
.
test_outputs
=
model
.
build_net
(
mode
=
'test'
)
mode
=
'test'
)
model
.
test_prog
=
model
.
test_prog
.
clone
(
for_test
=
True
)
model
.
test_prog
=
model
.
test_prog
.
clone
(
for_test
=
True
)
if
status
==
"QuantOnline"
:
print
(
'test quant online'
)
import
paddleslim
as
slim
model
.
test_prog
=
slim
.
quant
.
quant_aware
(
model
.
test_prog
,
model
.
exe
.
place
,
for_test
=
True
)
model
.
exe
.
run
(
startup_prog
)
model
.
exe
.
run
(
startup_prog
)
import
pickle
fluid
.
load
(
model
.
test_prog
,
osp
.
join
(
model_dir
,
'model'
))
with
open
(
osp
.
join
(
model_dir
,
'model.pdparams'
),
'rb'
)
as
f
:
if
status
==
"QuantOnline"
:
load_dict
=
pickle
.
load
(
f
)
model
.
test_prog
=
slim
.
quant
.
convert
(
model
.
test_prog
,
fluid
.
io
.
set_program_state
(
model
.
test_prog
,
load_dict
)
model
.
exe
.
place
)
elif
status
in
[
'Infer'
,
'Quant'
]:
elif
status
in
[
'Infer'
,
'Quant'
]:
[
prog
,
input_names
,
outputs
]
=
fluid
.
io
.
load_inference_model
(
[
prog
,
input_names
,
outputs
]
=
fluid
.
io
.
load_inference_model
(
...
...
contrib/HumanSeg/nets/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
.backbone
import
mobilenet_v2
from
.backbone
import
mobilenet_v2
from
.backbone
import
xception
from
.backbone
import
xception
from
.deeplabv3p
import
DeepLabv3p
from
.deeplabv3p
import
DeepLabv3p
...
...
contrib/HumanSeg/nets/backbone/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
.mobilenet_v2
import
MobileNetV2
from
.mobilenet_v2
import
MobileNetV2
from
.xception
import
Xception
from
.xception
import
Xception
contrib/HumanSeg/nets/backbone/mobilenet_v2.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -10,6 +11,7 @@
...
@@ -10,6 +11,7 @@
# distributed under the License is distributed on an "AS IS" BASIS,
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
...
...
contrib/HumanSeg/nets/backbone/xception.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/nets/deeplabv3p.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
copyright (c) 2020
PaddlePaddle Authors. All Rights Reserve.
#
Copyright (c) 2019
PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/nets/hrnet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
copyright (c) 2020
PaddlePaddle Authors. All Rights Reserve.
#
Copyright (c) 2019
PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/nets/libs.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
copyright (c) 2020
PaddlePaddle Authors. All Rights Reserve.
#
Copyright (c) 2019
PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/nets/seg_modules.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/nets/shufflenet_slim.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
from
__future__
import
print_function
from
__future__
import
print_function
...
...
contrib/HumanSeg/pretrained_weights/download_pretrained_weights.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/HumanSeg/quant_offline.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
argparse
import
argparse
from
datasets.dataset
import
Dataset
from
datasets.dataset
import
Dataset
import
transforms
import
transforms
...
...
contrib/HumanSeg/quant_online.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
argparse
import
argparse
from
datasets.dataset
import
Dataset
from
datasets.dataset
import
Dataset
from
models
import
HumanSegMobile
,
HumanSegLite
,
HumanSegServer
from
models
import
HumanSegMobile
,
HumanSegLite
,
HumanSegServer
...
...
contrib/HumanSeg/requirements.txt
浏览文件 @
7835c042
visualdl
=
= 2.0.0b1
visualdl
>
= 2.0.0b1
paddleslim
paddleslim
contrib/HumanSeg/train.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
argparse
import
argparse
from
datasets.dataset
import
Dataset
from
datasets.dataset
import
Dataset
from
models
import
HumanSegMobile
,
HumanSegLite
,
HumanSegServer
from
models
import
HumanSegMobile
,
HumanSegLite
,
HumanSegServer
...
...
contrib/HumanSeg/transforms/__init__.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/HumanSeg/transforms/functional.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/HumanSeg/transforms/transforms.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/HumanSeg/utils/__init__.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/HumanSeg/utils/humanseg_postprocess.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
numpy
as
np
import
numpy
as
np
import
cv2
import
cv2
import
os
import
os
...
...
contrib/HumanSeg/utils/logging.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/utils/metrics.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/utils/post_quantization.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/HumanSeg/utils/utils.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -205,11 +206,9 @@ def load_pretrained_weights(exe, main_prog, weights_dir, fuse_bn=False):
...
@@ -205,11 +206,9 @@ def load_pretrained_weights(exe, main_prog, weights_dir, fuse_bn=False):
vars_to_load
.
append
(
var
)
vars_to_load
.
append
(
var
)
logging
.
debug
(
"Weight {} will be load"
.
format
(
var
.
name
))
logging
.
debug
(
"Weight {} will be load"
.
format
(
var
.
name
))
fluid
.
io
.
load_vars
(
params_dict
=
fluid
.
io
.
load_program_state
(
executor
=
exe
,
weights_dir
,
var_list
=
vars_to_load
)
dirname
=
weights_dir
,
fluid
.
io
.
set_program_state
(
main_prog
,
params_dict
)
main_program
=
main_prog
,
vars
=
vars_to_load
)
if
len
(
vars_to_load
)
==
0
:
if
len
(
vars_to_load
)
==
0
:
logging
.
warning
(
logging
.
warning
(
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
...
...
contrib/HumanSeg/val.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
argparse
import
argparse
from
datasets.dataset
import
Dataset
from
datasets.dataset
import
Dataset
import
transforms
import
transforms
...
...
contrib/HumanSeg/video_infer.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
argparse
import
argparse
import
os
import
os
import
os.path
as
osp
import
os.path
as
osp
...
...
contrib/LaneNet/data_aug.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -21,6 +21,7 @@ from models.model_builder import ModelPhase
...
@@ -21,6 +21,7 @@ from models.model_builder import ModelPhase
from
pdseg.data_aug
import
get_random_scale
,
randomly_scale_image_and_label
,
random_rotation
,
\
from
pdseg.data_aug
import
get_random_scale
,
randomly_scale_image_and_label
,
random_rotation
,
\
rand_scale_aspect
,
hsv_color_jitter
,
rand_crop
rand_scale_aspect
,
hsv_color_jitter
,
rand_crop
def
resize
(
img
,
grt
=
None
,
grt_instance
=
None
,
mode
=
ModelPhase
.
TRAIN
):
def
resize
(
img
,
grt
=
None
,
grt_instance
=
None
,
mode
=
ModelPhase
.
TRAIN
):
"""
"""
改变图像及标签图像尺寸
改变图像及标签图像尺寸
...
@@ -44,7 +45,8 @@ def resize(img, grt=None, grt_instance=None, mode=ModelPhase.TRAIN):
...
@@ -44,7 +45,8 @@ def resize(img, grt=None, grt_instance=None, mode=ModelPhase.TRAIN):
if
grt
is
not
None
:
if
grt
is
not
None
:
grt
=
cv2
.
resize
(
grt
,
target_size
,
interpolation
=
cv2
.
INTER_NEAREST
)
grt
=
cv2
.
resize
(
grt
,
target_size
,
interpolation
=
cv2
.
INTER_NEAREST
)
if
grt_instance
is
not
None
:
if
grt_instance
is
not
None
:
grt_instance
=
cv2
.
resize
(
grt_instance
,
target_size
,
interpolation
=
cv2
.
INTER_NEAREST
)
grt_instance
=
cv2
.
resize
(
grt_instance
,
target_size
,
interpolation
=
cv2
.
INTER_NEAREST
)
elif
cfg
.
AUG
.
AUG_METHOD
==
'stepscaling'
:
elif
cfg
.
AUG
.
AUG_METHOD
==
'stepscaling'
:
if
mode
==
ModelPhase
.
TRAIN
:
if
mode
==
ModelPhase
.
TRAIN
:
min_scale_factor
=
cfg
.
AUG
.
MIN_SCALE_FACTOR
min_scale_factor
=
cfg
.
AUG
.
MIN_SCALE_FACTOR
...
...
contrib/LaneNet/dataset/download_tusimple.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/LaneNet/eval.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -122,6 +122,9 @@ def evaluate(cfg, ckpt_dir=None, use_gpu=False, use_mpio=False, **kwargs):
...
@@ -122,6 +122,9 @@ def evaluate(cfg, ckpt_dir=None, use_gpu=False, use_mpio=False, **kwargs):
if
ckpt_dir
is
not
None
:
if
ckpt_dir
is
not
None
:
print
(
'load test model:'
,
ckpt_dir
)
print
(
'load test model:'
,
ckpt_dir
)
try
:
fluid
.
load
(
test_prog
,
os
.
path
.
join
(
ckpt_dir
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
# Use streaming confusion matrix to calculate mean_iou
# Use streaming confusion matrix to calculate mean_iou
...
...
contrib/LaneNet/loss.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -19,8 +19,9 @@ from utils.config import cfg
...
@@ -19,8 +19,9 @@ from utils.config import cfg
def
unsorted_segment_sum
(
data
,
segment_ids
,
unique_labels
,
feature_dims
):
def
unsorted_segment_sum
(
data
,
segment_ids
,
unique_labels
,
feature_dims
):
zeros
=
fluid
.
layers
.
fill_constant_batch_size_like
(
unique_labels
,
shape
=
[
1
,
feature_dims
],
unique_labels_shape
=
fluid
.
layers
.
shape
(
unique_labels
)
dtype
=
'float32'
,
value
=
0
)
zeros
=
fluid
.
layers
.
fill_constant
(
shape
=
[
unique_labels_shape
[
0
],
feature_dims
],
dtype
=
'float32'
,
value
=
0
)
segment_ids
=
fluid
.
layers
.
unsqueeze
(
segment_ids
,
axes
=
[
1
])
segment_ids
=
fluid
.
layers
.
unsqueeze
(
segment_ids
,
axes
=
[
1
])
segment_ids
.
stop_gradient
=
True
segment_ids
.
stop_gradient
=
True
segment_sum
=
fluid
.
layers
.
scatter_nd_add
(
zeros
,
segment_ids
,
data
)
segment_sum
=
fluid
.
layers
.
scatter_nd_add
(
zeros
,
segment_ids
,
data
)
...
@@ -30,29 +31,23 @@ def unsorted_segment_sum(data, segment_ids, unique_labels, feature_dims):
...
@@ -30,29 +31,23 @@ def unsorted_segment_sum(data, segment_ids, unique_labels, feature_dims):
def
norm
(
x
,
axis
=-
1
):
def
norm
(
x
,
axis
=-
1
):
distance
=
fluid
.
layers
.
reduce_sum
(
fluid
.
layers
.
abs
(
x
),
dim
=
axis
,
keep_dim
=
True
)
distance
=
fluid
.
layers
.
reduce_sum
(
fluid
.
layers
.
abs
(
x
),
dim
=
axis
,
keep_dim
=
True
)
return
distance
return
distance
def
discriminative_loss_single
(
prediction
,
def
discriminative_loss_single
(
prediction
,
correct_label
,
feature_dim
,
correct_label
,
label_shape
,
delta_v
,
delta_d
,
param_var
,
feature_dim
,
param_dist
,
param_reg
):
label_shape
,
delta_v
,
correct_label
=
fluid
.
layers
.
reshape
(
correct_label
,
delta_d
,
[
label_shape
[
1
]
*
label_shape
[
0
]])
param_var
,
param_dist
,
param_reg
):
correct_label
=
fluid
.
layers
.
reshape
(
correct_label
,
[
label_shape
[
1
]
*
label_shape
[
0
]])
prediction
=
fluid
.
layers
.
transpose
(
prediction
,
[
1
,
2
,
0
])
prediction
=
fluid
.
layers
.
transpose
(
prediction
,
[
1
,
2
,
0
])
reshaped_pred
=
fluid
.
layers
.
reshape
(
reshaped_pred
=
fluid
.
layers
.
reshape
(
prediction
,
[
prediction
,
[
label_shape
[
1
]
*
label_shape
[
0
],
feature_dim
])
label_shape
[
1
]
*
label_shape
[
0
],
feature_dim
])
unique_labels
,
unique_id
,
counts
=
fluid
.
layers
.
unique_with_counts
(
correct_label
)
unique_labels
,
unique_id
,
counts
=
fluid
.
layers
.
unique_with_counts
(
correct_label
)
correct_label
.
stop_gradient
=
True
correct_label
.
stop_gradient
=
True
counts
=
fluid
.
layers
.
cast
(
counts
,
'float32'
)
counts
=
fluid
.
layers
.
cast
(
counts
,
'float32'
)
num_instances
=
fluid
.
layers
.
shape
(
unique_labels
)
num_instances
=
fluid
.
layers
.
shape
(
unique_labels
)
...
@@ -69,24 +64,29 @@ def discriminative_loss_single(
...
@@ -69,24 +64,29 @@ def discriminative_loss_single(
distance
=
norm
(
tmp
)
distance
=
norm
(
tmp
)
distance
=
distance
-
delta_v
distance
=
distance
-
delta_v
distance_pos
=
fluid
.
layers
.
greater_equal
(
distance
,
fluid
.
layers
.
zeros_like
(
distance
))
distance_pos
=
fluid
.
layers
.
greater_equal
(
distance
,
fluid
.
layers
.
zeros_like
(
distance
))
distance_pos
=
fluid
.
layers
.
cast
(
distance_pos
,
'float32'
)
distance_pos
=
fluid
.
layers
.
cast
(
distance_pos
,
'float32'
)
distance
=
distance
*
distance_pos
distance
=
distance
*
distance_pos
distance
=
fluid
.
layers
.
square
(
distance
)
distance
=
fluid
.
layers
.
square
(
distance
)
l_var
=
unsorted_segment_sum
(
distance
,
unique_id
,
unique_labels
,
feature_dims
=
1
)
l_var
=
unsorted_segment_sum
(
distance
,
unique_id
,
unique_labels
,
feature_dims
=
1
)
l_var
=
fluid
.
layers
.
elementwise_div
(
l_var
,
counts_rsp
)
l_var
=
fluid
.
layers
.
elementwise_div
(
l_var
,
counts_rsp
)
l_var
=
fluid
.
layers
.
reduce_sum
(
l_var
)
l_var
=
fluid
.
layers
.
reduce_sum
(
l_var
)
l_var
=
l_var
/
fluid
.
layers
.
cast
(
num_instances
*
(
num_instances
-
1
),
'float32'
)
l_var
=
l_var
/
fluid
.
layers
.
cast
(
num_instances
*
(
num_instances
-
1
),
'float32'
)
mu_interleaved_rep
=
fluid
.
layers
.
expand
(
mu
,
[
num_instances
,
1
])
mu_interleaved_rep
=
fluid
.
layers
.
expand
(
mu
,
[
num_instances
,
1
])
mu_band_rep
=
fluid
.
layers
.
expand
(
mu
,
[
1
,
num_instances
])
mu_band_rep
=
fluid
.
layers
.
expand
(
mu
,
[
1
,
num_instances
])
mu_band_rep
=
fluid
.
layers
.
reshape
(
mu_band_rep
,
(
num_instances
*
num_instances
,
feature_dim
))
mu_band_rep
=
fluid
.
layers
.
reshape
(
mu_band_rep
,
(
num_instances
*
num_instances
,
feature_dim
))
mu_diff
=
fluid
.
layers
.
elementwise_sub
(
mu_band_rep
,
mu_interleaved_rep
)
mu_diff
=
fluid
.
layers
.
elementwise_sub
(
mu_band_rep
,
mu_interleaved_rep
)
intermediate_tensor
=
fluid
.
layers
.
reduce_sum
(
fluid
.
layers
.
abs
(
mu_diff
),
dim
=
1
)
intermediate_tensor
=
fluid
.
layers
.
reduce_sum
(
fluid
.
layers
.
abs
(
mu_diff
),
dim
=
1
)
intermediate_tensor
.
stop_gradient
=
True
intermediate_tensor
.
stop_gradient
=
True
zero_vector
=
fluid
.
layers
.
zeros
([
1
],
'float32'
)
zero_vector
=
fluid
.
layers
.
zeros
([
1
],
'float32'
)
bool_mask
=
fluid
.
layers
.
not_equal
(
intermediate_tensor
,
zero_vector
)
bool_mask
=
fluid
.
layers
.
not_equal
(
intermediate_tensor
,
zero_vector
)
...
@@ -95,7 +95,8 @@ def discriminative_loss_single(
...
@@ -95,7 +95,8 @@ def discriminative_loss_single(
mu_norm
=
norm
(
mu_diff_bool
)
mu_norm
=
norm
(
mu_diff_bool
)
mu_norm
=
2.
*
delta_d
-
mu_norm
mu_norm
=
2.
*
delta_d
-
mu_norm
mu_norm_pos
=
fluid
.
layers
.
greater_equal
(
mu_norm
,
fluid
.
layers
.
zeros_like
(
mu_norm
))
mu_norm_pos
=
fluid
.
layers
.
greater_equal
(
mu_norm
,
fluid
.
layers
.
zeros_like
(
mu_norm
))
mu_norm_pos
=
fluid
.
layers
.
cast
(
mu_norm_pos
,
'float32'
)
mu_norm_pos
=
fluid
.
layers
.
cast
(
mu_norm_pos
,
'float32'
)
mu_norm
=
mu_norm
*
mu_norm_pos
mu_norm
=
mu_norm
*
mu_norm_pos
mu_norm_pos
.
stop_gradient
=
True
mu_norm_pos
.
stop_gradient
=
True
...
@@ -122,8 +123,8 @@ def discriminative_loss(prediction, correct_label, feature_dim, image_shape,
...
@@ -122,8 +123,8 @@ def discriminative_loss(prediction, correct_label, feature_dim, image_shape,
output_ta_reg
=
0.
output_ta_reg
=
0.
for
i
in
range
(
batch_size
):
for
i
in
range
(
batch_size
):
disc_loss_single
,
l_var_single
,
l_dist_single
,
l_reg_single
=
discriminative_loss_single
(
disc_loss_single
,
l_var_single
,
l_dist_single
,
l_reg_single
=
discriminative_loss_single
(
prediction
[
i
],
correct_label
[
i
],
feature_dim
,
image_shape
,
delta_v
,
delta_d
,
param_var
,
param_dist
,
prediction
[
i
],
correct_label
[
i
],
feature_dim
,
image_shape
,
delta_v
,
param_reg
)
delta_d
,
param_var
,
param_dist
,
param_reg
)
output_ta_loss
+=
disc_loss_single
output_ta_loss
+=
disc_loss_single
output_ta_var
+=
l_var_single
output_ta_var
+=
l_var_single
output_ta_dist
+=
l_dist_single
output_ta_dist
+=
l_dist_single
...
@@ -134,5 +135,3 @@ def discriminative_loss(prediction, correct_label, feature_dim, image_shape,
...
@@ -134,5 +135,3 @@ def discriminative_loss(prediction, correct_label, feature_dim, image_shape,
l_dist
=
output_ta_dist
/
batch_size
l_dist
=
output_ta_dist
/
batch_size
l_reg
=
output_ta_reg
/
batch_size
l_reg
=
output_ta_reg
/
batch_size
return
disc_loss
,
l_var
,
l_dist
,
l_reg
return
disc_loss
,
l_var
,
l_dist
,
l_reg
contrib/LaneNet/models/__init__.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/LaneNet/models/model_builder.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/LaneNet/models/modeling/lanenet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -18,7 +18,6 @@ from __future__ import print_function
...
@@ -18,7 +18,6 @@ from __future__ import print_function
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
from
utils.config
import
cfg
from
utils.config
import
cfg
from
pdseg.models.libs.model_libs
import
scope
,
name_scope
from
pdseg.models.libs.model_libs
import
scope
,
name_scope
from
pdseg.models.libs.model_libs
import
bn
,
bn_relu
,
relu
from
pdseg.models.libs.model_libs
import
bn
,
bn_relu
,
relu
...
@@ -86,7 +85,12 @@ def bottleneck(inputs,
...
@@ -86,7 +85,12 @@ def bottleneck(inputs,
with
scope
(
'down_sample'
):
with
scope
(
'down_sample'
):
inputs_shape
=
inputs
.
shape
inputs_shape
=
inputs
.
shape
with
scope
(
'main_max_pool'
):
with
scope
(
'main_max_pool'
):
net_main
=
fluid
.
layers
.
conv2d
(
inputs
,
inputs_shape
[
1
],
filter_size
=
3
,
stride
=
2
,
padding
=
'SAME'
)
net_main
=
fluid
.
layers
.
conv2d
(
inputs
,
inputs_shape
[
1
],
filter_size
=
3
,
stride
=
2
,
padding
=
'SAME'
)
#First get the difference in depth to pad, then pad with zeros only on the last dimension.
#First get the difference in depth to pad, then pad with zeros only on the last dimension.
depth_to_pad
=
abs
(
inputs_shape
[
1
]
-
output_depth
)
depth_to_pad
=
abs
(
inputs_shape
[
1
]
-
output_depth
)
...
@@ -95,12 +99,16 @@ def bottleneck(inputs,
...
@@ -95,12 +99,16 @@ def bottleneck(inputs,
net_main
=
fluid
.
layers
.
pad
(
net_main
,
paddings
=
paddings
)
net_main
=
fluid
.
layers
.
pad
(
net_main
,
paddings
=
paddings
)
with
scope
(
'block1'
):
with
scope
(
'block1'
):
net
=
conv
(
inputs
,
reduced_depth
,
[
2
,
2
],
stride
=
2
,
padding
=
'same'
)
net
=
conv
(
inputs
,
reduced_depth
,
[
2
,
2
],
stride
=
2
,
padding
=
'same'
)
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
with
scope
(
'block2'
):
with
scope
(
'block2'
):
net
=
conv
(
net
,
reduced_depth
,
[
filter_size
,
filter_size
],
padding
=
'same'
)
net
=
conv
(
net
,
reduced_depth
,
[
filter_size
,
filter_size
],
padding
=
'same'
)
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
...
@@ -137,13 +145,18 @@ def bottleneck(inputs,
...
@@ -137,13 +145,18 @@ def bottleneck(inputs,
# Second conv block --- apply dilated convolution here
# Second conv block --- apply dilated convolution here
with
scope
(
'block2'
):
with
scope
(
'block2'
):
net
=
conv
(
net
,
reduced_depth
,
filter_size
,
padding
=
'SAME'
,
dilation
=
dilation_rate
)
net
=
conv
(
net
,
reduced_depth
,
filter_size
,
padding
=
'SAME'
,
dilation
=
dilation_rate
)
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
# Final projection with 1x1 kernel (Expansion)
# Final projection with 1x1 kernel (Expansion)
with
scope
(
'block3'
):
with
scope
(
'block3'
):
net
=
conv
(
net
,
output_depth
,
[
1
,
1
])
net
=
conv
(
net
,
output_depth
,
[
1
,
1
])
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
...
@@ -172,9 +185,11 @@ def bottleneck(inputs,
...
@@ -172,9 +185,11 @@ def bottleneck(inputs,
# Second conv block --- apply asymmetric conv here
# Second conv block --- apply asymmetric conv here
with
scope
(
'block2'
):
with
scope
(
'block2'
):
with
scope
(
'asymmetric_conv2a'
):
with
scope
(
'asymmetric_conv2a'
):
net
=
conv
(
net
,
reduced_depth
,
[
filter_size
,
1
],
padding
=
'same'
)
net
=
conv
(
net
,
reduced_depth
,
[
filter_size
,
1
],
padding
=
'same'
)
with
scope
(
'asymmetric_conv2b'
):
with
scope
(
'asymmetric_conv2b'
):
net
=
conv
(
net
,
reduced_depth
,
[
1
,
filter_size
],
padding
=
'same'
)
net
=
conv
(
net
,
reduced_depth
,
[
1
,
filter_size
],
padding
=
'same'
)
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
...
@@ -211,7 +226,8 @@ def bottleneck(inputs,
...
@@ -211,7 +226,8 @@ def bottleneck(inputs,
with
scope
(
'unpool'
):
with
scope
(
'unpool'
):
net_unpool
=
conv
(
inputs
,
output_depth
,
[
1
,
1
])
net_unpool
=
conv
(
inputs
,
output_depth
,
[
1
,
1
])
net_unpool
=
bn
(
net_unpool
)
net_unpool
=
bn
(
net_unpool
)
net_unpool
=
fluid
.
layers
.
resize_bilinear
(
net_unpool
,
out_shape
=
output_shape
[
2
:])
net_unpool
=
fluid
.
layers
.
resize_bilinear
(
net_unpool
,
out_shape
=
output_shape
[
2
:])
# First 1x1 projection to reduce depth
# First 1x1 projection to reduce depth
with
scope
(
'block1'
):
with
scope
(
'block1'
):
...
@@ -220,7 +236,12 @@ def bottleneck(inputs,
...
@@ -220,7 +236,12 @@ def bottleneck(inputs,
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
with
scope
(
'block2'
):
with
scope
(
'block2'
):
net
=
deconv
(
net
,
reduced_depth
,
filter_size
=
filter_size
,
stride
=
2
,
padding
=
'same'
)
net
=
deconv
(
net
,
reduced_depth
,
filter_size
=
filter_size
,
stride
=
2
,
padding
=
'same'
)
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
...
@@ -253,7 +274,10 @@ def bottleneck(inputs,
...
@@ -253,7 +274,10 @@ def bottleneck(inputs,
# Second conv block
# Second conv block
with
scope
(
'block2'
):
with
scope
(
'block2'
):
net
=
conv
(
net
,
reduced_depth
,
[
filter_size
,
filter_size
],
padding
=
'same'
)
net
=
conv
(
net
,
reduced_depth
,
[
filter_size
,
filter_size
],
padding
=
'same'
)
net
=
bn
(
net
)
net
=
bn
(
net
)
net
=
prelu
(
net
,
decoder
=
decoder
)
net
=
prelu
(
net
,
decoder
=
decoder
)
...
@@ -281,16 +305,32 @@ def ENet_stage1(inputs, name_scope='stage1_block'):
...
@@ -281,16 +305,32 @@ def ENet_stage1(inputs, name_scope='stage1_block'):
=
bottleneck
(
inputs
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
type
=
DOWNSAMPLING
,
=
bottleneck
(
inputs
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
type
=
DOWNSAMPLING
,
name_scope
=
'bottleneck1_0'
)
name_scope
=
'bottleneck1_0'
)
with
scope
(
'bottleneck1_1'
):
with
scope
(
'bottleneck1_1'
):
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
name_scope
=
'bottleneck1_1'
)
name_scope
=
'bottleneck1_1'
)
with
scope
(
'bottleneck1_2'
):
with
scope
(
'bottleneck1_2'
):
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
name_scope
=
'bottleneck1_2'
)
name_scope
=
'bottleneck1_2'
)
with
scope
(
'bottleneck1_3'
):
with
scope
(
'bottleneck1_3'
):
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
name_scope
=
'bottleneck1_3'
)
name_scope
=
'bottleneck1_3'
)
with
scope
(
'bottleneck1_4'
):
with
scope
(
'bottleneck1_4'
):
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.01
,
name_scope
=
'bottleneck1_4'
)
name_scope
=
'bottleneck1_4'
)
return
net
,
inputs_shape_1
return
net
,
inputs_shape_1
...
@@ -302,16 +342,37 @@ def ENet_stage2(inputs, name_scope='stage2_block'):
...
@@ -302,16 +342,37 @@ def ENet_stage2(inputs, name_scope='stage2_block'):
name_scope
=
'bottleneck2_0'
)
name_scope
=
'bottleneck2_0'
)
for
i
in
range
(
2
):
for
i
in
range
(
2
):
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
1
))):
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
1
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
1
)))
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
1
)))
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
2
))):
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
2
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
1
)),
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
1
)),
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
2
)))
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
2
)))
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
3
))):
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
3
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
5
,
regularizer_prob
=
0.1
,
type
=
ASYMMETRIC
,
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
5
,
regularizer_prob
=
0.1
,
type
=
ASYMMETRIC
,
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
3
)))
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
3
)))
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
4
))):
with
scope
(
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
4
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
2
)),
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
2
)),
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
4
)))
name_scope
=
'bottleneck2_{}'
.
format
(
str
(
4
*
i
+
4
)))
return
net
,
inputs_shape_2
return
net
,
inputs_shape_2
...
@@ -320,51 +381,105 @@ def ENet_stage3(inputs, name_scope='stage3_block'):
...
@@ -320,51 +381,105 @@ def ENet_stage3(inputs, name_scope='stage3_block'):
with
scope
(
name_scope
):
with
scope
(
name_scope
):
for
i
in
range
(
2
):
for
i
in
range
(
2
):
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
0
))):
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
0
))):
net
=
bottleneck
(
inputs
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
net
=
bottleneck
(
inputs
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
0
)))
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
0
)))
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
1
))):
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
1
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
1
)),
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
1
)),
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
1
)))
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
1
)))
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
2
))):
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
2
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
5
,
regularizer_prob
=
0.1
,
type
=
ASYMMETRIC
,
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
5
,
regularizer_prob
=
0.1
,
type
=
ASYMMETRIC
,
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
2
)))
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
2
)))
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
3
))):
with
scope
(
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
3
))):
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
2
)),
net
=
bottleneck
(
net
,
output_depth
=
128
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
DILATED
,
dilation_rate
=
(
2
**
(
2
*
i
+
2
)),
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
3
)))
name_scope
=
'bottleneck3_{}'
.
format
(
str
(
4
*
i
+
3
)))
return
net
return
net
def
ENet_stage4
(
inputs
,
inputs_shape
,
connect_tensor
,
def
ENet_stage4
(
inputs
,
skip_connections
=
True
,
name_scope
=
'stage4_block'
):
inputs_shape
,
connect_tensor
,
skip_connections
=
True
,
name_scope
=
'stage4_block'
):
with
scope
(
name_scope
):
with
scope
(
name_scope
):
with
scope
(
'bottleneck4_0'
):
with
scope
(
'bottleneck4_0'
):
net
=
bottleneck
(
inputs
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
net
=
bottleneck
(
type
=
UPSAMPLING
,
decoder
=
True
,
output_shape
=
inputs_shape
,
inputs
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
UPSAMPLING
,
decoder
=
True
,
output_shape
=
inputs_shape
,
name_scope
=
'bottleneck4_0'
)
name_scope
=
'bottleneck4_0'
)
if
skip_connections
:
if
skip_connections
:
net
=
fluid
.
layers
.
elementwise_add
(
net
,
connect_tensor
)
net
=
fluid
.
layers
.
elementwise_add
(
net
,
connect_tensor
)
with
scope
(
'bottleneck4_1'
):
with
scope
(
'bottleneck4_1'
):
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
decoder
=
True
,
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
decoder
=
True
,
name_scope
=
'bottleneck4_1'
)
name_scope
=
'bottleneck4_1'
)
with
scope
(
'bottleneck4_2'
):
with
scope
(
'bottleneck4_2'
):
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
decoder
=
True
,
net
=
bottleneck
(
net
,
output_depth
=
64
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
decoder
=
True
,
name_scope
=
'bottleneck4_2'
)
name_scope
=
'bottleneck4_2'
)
return
net
return
net
def
ENet_stage5
(
inputs
,
inputs_shape
,
connect_tensor
,
skip_connections
=
True
,
def
ENet_stage5
(
inputs
,
inputs_shape
,
connect_tensor
,
skip_connections
=
True
,
name_scope
=
'stage5_block'
):
name_scope
=
'stage5_block'
):
with
scope
(
name_scope
):
with
scope
(
name_scope
):
net
=
bottleneck
(
inputs
,
output_depth
=
16
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
UPSAMPLING
,
net
=
bottleneck
(
decoder
=
True
,
output_shape
=
inputs_shape
,
inputs
,
output_depth
=
16
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
type
=
UPSAMPLING
,
decoder
=
True
,
output_shape
=
inputs_shape
,
name_scope
=
'bottleneck5_0'
)
name_scope
=
'bottleneck5_0'
)
if
skip_connections
:
if
skip_connections
:
net
=
fluid
.
layers
.
elementwise_add
(
net
,
connect_tensor
)
net
=
fluid
.
layers
.
elementwise_add
(
net
,
connect_tensor
)
with
scope
(
'bottleneck5_1'
):
with
scope
(
'bottleneck5_1'
):
net
=
bottleneck
(
net
,
output_depth
=
16
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
decoder
=
True
,
net
=
bottleneck
(
net
,
output_depth
=
16
,
filter_size
=
3
,
regularizer_prob
=
0.1
,
decoder
=
True
,
name_scope
=
'bottleneck5_1'
)
name_scope
=
'bottleneck5_1'
)
return
net
return
net
...
@@ -378,14 +493,16 @@ def decoder(input, num_classes):
...
@@ -378,14 +493,16 @@ def decoder(input, num_classes):
segStage3
=
ENet_stage3
(
stage2
)
segStage3
=
ENet_stage3
(
stage2
)
segStage4
=
ENet_stage4
(
segStage3
,
inputs_shape_2
,
stage1
)
segStage4
=
ENet_stage4
(
segStage3
,
inputs_shape_2
,
stage1
)
segStage5
=
ENet_stage5
(
segStage4
,
inputs_shape_1
,
initial
)
segStage5
=
ENet_stage5
(
segStage4
,
inputs_shape_1
,
initial
)
segLogits
=
deconv
(
segStage5
,
num_classes
,
filter_size
=
2
,
stride
=
2
,
padding
=
'SAME'
)
segLogits
=
deconv
(
segStage5
,
num_classes
,
filter_size
=
2
,
stride
=
2
,
padding
=
'SAME'
)
# Embedding branch
# Embedding branch
with
scope
(
'LaneNetEm'
):
with
scope
(
'LaneNetEm'
):
emStage3
=
ENet_stage3
(
stage2
)
emStage3
=
ENet_stage3
(
stage2
)
emStage4
=
ENet_stage4
(
emStage3
,
inputs_shape_2
,
stage1
)
emStage4
=
ENet_stage4
(
emStage3
,
inputs_shape_2
,
stage1
)
emStage5
=
ENet_stage5
(
emStage4
,
inputs_shape_1
,
initial
)
emStage5
=
ENet_stage5
(
emStage4
,
inputs_shape_1
,
initial
)
emLogits
=
deconv
(
emStage5
,
4
,
filter_size
=
2
,
stride
=
2
,
padding
=
'SAME'
)
emLogits
=
deconv
(
emStage5
,
4
,
filter_size
=
2
,
stride
=
2
,
padding
=
'SAME'
)
elif
'vgg'
in
cfg
.
MODEL
.
LANENET
.
BACKBONE
:
elif
'vgg'
in
cfg
.
MODEL
.
LANENET
.
BACKBONE
:
encoder_list
=
[
'pool5'
,
'pool4'
,
'pool3'
]
encoder_list
=
[
'pool5'
,
'pool4'
,
'pool3'
]
...
@@ -396,14 +513,16 @@ def decoder(input, num_classes):
...
@@ -396,14 +513,16 @@ def decoder(input, num_classes):
encoder_list
=
encoder_list
[
1
:]
encoder_list
=
encoder_list
[
1
:]
for
i
in
range
(
len
(
encoder_list
)):
for
i
in
range
(
len
(
encoder_list
)):
with
scope
(
'deconv_{:d}'
.
format
(
i
+
1
)):
with
scope
(
'deconv_{:d}'
.
format
(
i
+
1
)):
deconv_out
=
deconv
(
score
,
64
,
filter_size
=
4
,
stride
=
2
,
padding
=
'SAME'
)
deconv_out
=
deconv
(
score
,
64
,
filter_size
=
4
,
stride
=
2
,
padding
=
'SAME'
)
input_tensor
=
input
[
encoder_list
[
i
]]
input_tensor
=
input
[
encoder_list
[
i
]]
with
scope
(
'score_{:d}'
.
format
(
i
+
1
)):
with
scope
(
'score_{:d}'
.
format
(
i
+
1
)):
score
=
conv
(
input_tensor
,
64
,
1
)
score
=
conv
(
input_tensor
,
64
,
1
)
score
=
fluid
.
layers
.
elementwise_add
(
deconv_out
,
score
)
score
=
fluid
.
layers
.
elementwise_add
(
deconv_out
,
score
)
with
scope
(
'deconv_final'
):
with
scope
(
'deconv_final'
):
emLogits
=
deconv
(
score
,
64
,
filter_size
=
16
,
stride
=
8
,
padding
=
'SAME'
)
emLogits
=
deconv
(
score
,
64
,
filter_size
=
16
,
stride
=
8
,
padding
=
'SAME'
)
with
scope
(
'score_final'
):
with
scope
(
'score_final'
):
segLogits
=
conv
(
emLogits
,
num_classes
,
1
)
segLogits
=
conv
(
emLogits
,
num_classes
,
1
)
emLogits
=
relu
(
conv
(
emLogits
,
4
,
1
))
emLogits
=
relu
(
conv
(
emLogits
,
4
,
1
))
...
@@ -415,7 +534,8 @@ def encoder(input):
...
@@ -415,7 +534,8 @@ def encoder(input):
model
=
vgg_backbone
(
layers
=
16
)
model
=
vgg_backbone
(
layers
=
16
)
#output = model.net(input)
#output = model.net(input)
_
,
encode_feature_dict
=
model
.
net
(
input
,
end_points
=
13
,
decode_points
=
[
7
,
10
,
13
])
_
,
encode_feature_dict
=
model
.
net
(
input
,
end_points
=
13
,
decode_points
=
[
7
,
10
,
13
])
output
=
{}
output
=
{}
output
[
'pool3'
]
=
encode_feature_dict
[
7
]
output
[
'pool3'
]
=
encode_feature_dict
[
7
]
output
[
'pool4'
]
=
encode_feature_dict
[
10
]
output
[
'pool4'
]
=
encode_feature_dict
[
10
]
...
@@ -427,8 +547,9 @@ def encoder(input):
...
@@ -427,8 +547,9 @@ def encoder(input):
stage2
,
inputs_shape_2
=
ENet_stage2
(
stage1
)
stage2
,
inputs_shape_2
=
ENet_stage2
(
stage1
)
output
=
(
initial
,
stage1
,
stage2
,
inputs_shape_1
,
inputs_shape_2
)
output
=
(
initial
,
stage1
,
stage2
,
inputs_shape_1
,
inputs_shape_2
)
else
:
else
:
raise
Exception
(
"LaneNet expect enet and vgg backbone, but received {}"
.
raise
Exception
(
format
(
cfg
.
MODEL
.
LANENET
.
BACKBONE
))
"LaneNet expect enet and vgg backbone, but received {}"
.
format
(
cfg
.
MODEL
.
LANENET
.
BACKBONE
))
return
output
return
output
...
...
contrib/LaneNet/reader.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -58,7 +58,8 @@ class LaneNetDataset():
...
@@ -58,7 +58,8 @@ class LaneNetDataset():
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
num_lines
=
len
(
self
.
all_lines
)
//
cfg
.
NUM_TRAINERS
num_lines
=
len
(
self
.
all_lines
)
//
cfg
.
NUM_TRAINERS
self
.
lines
=
self
.
all_lines
[
num_lines
*
cfg
.
TRAINER_ID
:
num_lines
*
(
cfg
.
TRAINER_ID
+
1
)]
self
.
lines
=
self
.
all_lines
[
num_lines
*
cfg
.
TRAINER_ID
:
num_lines
*
(
cfg
.
TRAINER_ID
+
1
)]
self
.
shuffle_seed
+=
1
self
.
shuffle_seed
+=
1
elif
self
.
shuffle
:
elif
self
.
shuffle
:
np
.
random
.
shuffle
(
self
.
lines
)
np
.
random
.
shuffle
(
self
.
lines
)
...
@@ -86,7 +87,8 @@ class LaneNetDataset():
...
@@ -86,7 +87,8 @@ class LaneNetDataset():
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
num_lines
=
len
(
self
.
all_lines
)
//
self
.
num_trainers
num_lines
=
len
(
self
.
all_lines
)
//
self
.
num_trainers
self
.
lines
=
self
.
all_lines
[
num_lines
*
self
.
trainer_id
:
num_lines
*
(
self
.
trainer_id
+
1
)]
self
.
lines
=
self
.
all_lines
[
num_lines
*
self
.
trainer_id
:
num_lines
*
(
self
.
trainer_id
+
1
)]
self
.
shuffle_seed
+=
1
self
.
shuffle_seed
+=
1
elif
self
.
shuffle
:
elif
self
.
shuffle
:
np
.
random
.
shuffle
(
self
.
lines
)
np
.
random
.
shuffle
(
self
.
lines
)
...
@@ -118,7 +120,8 @@ class LaneNetDataset():
...
@@ -118,7 +120,8 @@ class LaneNetDataset():
def
batch_reader
(
is_test
=
False
,
drop_last
=
drop_last
):
def
batch_reader
(
is_test
=
False
,
drop_last
=
drop_last
):
if
is_test
:
if
is_test
:
imgs
,
grts
,
grts_instance
,
img_names
,
valid_shapes
,
org_shapes
=
[],
[],
[],
[],
[],
[]
imgs
,
grts
,
grts_instance
,
img_names
,
valid_shapes
,
org_shapes
=
[],
[],
[],
[],
[],
[]
for
img
,
grt
,
grt_instance
,
img_name
,
valid_shape
,
org_shape
in
reader
():
for
img
,
grt
,
grt_instance
,
img_name
,
valid_shape
,
org_shape
in
reader
(
):
imgs
.
append
(
img
)
imgs
.
append
(
img
)
grts
.
append
(
grt
)
grts
.
append
(
grt
)
grts_instance
.
append
(
grt_instance
)
grts_instance
.
append
(
grt_instance
)
...
@@ -126,13 +129,14 @@ class LaneNetDataset():
...
@@ -126,13 +129,14 @@ class LaneNetDataset():
valid_shapes
.
append
(
valid_shape
)
valid_shapes
.
append
(
valid_shape
)
org_shapes
.
append
(
org_shape
)
org_shapes
.
append
(
org_shape
)
if
len
(
imgs
)
==
batch_size
:
if
len
(
imgs
)
==
batch_size
:
yield
np
.
array
(
imgs
),
np
.
array
(
yield
np
.
array
(
imgs
),
np
.
array
(
grts
),
np
.
array
(
grts
),
np
.
array
(
grts_instance
),
img_names
,
np
.
array
(
valid_shapes
)
,
np
.
array
(
grts
_instance
),
img_names
,
np
.
array
(
org_shapes
)
valid_shapes
),
np
.
array
(
org_shapes
)
imgs
,
grts
,
grts_instance
,
img_names
,
valid_shapes
,
org_shapes
=
[],
[],
[],
[],
[],
[]
imgs
,
grts
,
grts_instance
,
img_names
,
valid_shapes
,
org_shapes
=
[],
[],
[],
[],
[],
[]
if
not
drop_last
and
len
(
imgs
)
>
0
:
if
not
drop_last
and
len
(
imgs
)
>
0
:
yield
np
.
array
(
imgs
),
np
.
array
(
grts
),
np
.
array
(
grts_instance
),
img_names
,
np
.
array
(
yield
np
.
array
(
imgs
),
np
.
array
(
grts
),
np
.
array
(
grts_instance
),
img_names
,
np
.
array
(
valid_shapes
),
np
.
array
(
org_shapes
)
valid_shapes
),
np
.
array
(
org_shapes
)
else
:
else
:
imgs
,
labs
,
labs_instance
,
ignore
=
[],
[],
[],
[]
imgs
,
labs
,
labs_instance
,
ignore
=
[],
[],
[],
[]
...
@@ -144,12 +148,14 @@ class LaneNetDataset():
...
@@ -144,12 +148,14 @@ class LaneNetDataset():
ignore
.
append
(
ig
)
ignore
.
append
(
ig
)
bs
+=
1
bs
+=
1
if
bs
==
batch_size
:
if
bs
==
batch_size
:
yield
np
.
array
(
imgs
),
np
.
array
(
labs
),
np
.
array
(
labs_instance
),
np
.
array
(
ignore
)
yield
np
.
array
(
imgs
),
np
.
array
(
labs
),
np
.
array
(
labs_instance
),
np
.
array
(
ignore
)
bs
=
0
bs
=
0
imgs
,
labs
,
labs_instance
,
ignore
=
[],
[],
[],
[]
imgs
,
labs
,
labs_instance
,
ignore
=
[],
[],
[],
[]
if
not
drop_last
and
bs
>
0
:
if
not
drop_last
and
bs
>
0
:
yield
np
.
array
(
imgs
),
np
.
array
(
labs
),
np
.
array
(
labs_instance
),
np
.
array
(
ignore
)
yield
np
.
array
(
imgs
),
np
.
array
(
labs
),
np
.
array
(
labs_instance
),
np
.
array
(
ignore
)
return
batch_reader
(
is_test
,
drop_last
)
return
batch_reader
(
is_test
,
drop_last
)
...
@@ -299,10 +305,12 @@ class LaneNetDataset():
...
@@ -299,10 +305,12 @@ class LaneNetDataset():
img
,
grt
=
aug
.
rand_crop
(
img
,
grt
,
mode
=
mode
)
img
,
grt
=
aug
.
rand_crop
(
img
,
grt
,
mode
=
mode
)
elif
ModelPhase
.
is_eval
(
mode
):
elif
ModelPhase
.
is_eval
(
mode
):
img
,
grt
,
grt_instance
=
aug
.
resize
(
img
,
grt
,
grt_instance
,
mode
=
mode
)
img
,
grt
,
grt_instance
=
aug
.
resize
(
img
,
grt
,
grt_instance
,
mode
=
mode
)
elif
ModelPhase
.
is_visual
(
mode
):
elif
ModelPhase
.
is_visual
(
mode
):
ori_img
=
img
.
copy
()
ori_img
=
img
.
copy
()
img
,
grt
,
grt_instance
=
aug
.
resize
(
img
,
grt
,
grt_instance
,
mode
=
mode
)
img
,
grt
,
grt_instance
=
aug
.
resize
(
img
,
grt
,
grt_instance
,
mode
=
mode
)
valid_shape
=
[
img
.
shape
[
0
],
img
.
shape
[
1
]]
valid_shape
=
[
img
.
shape
[
0
],
img
.
shape
[
1
]]
else
:
else
:
raise
ValueError
(
"Dataset mode={} Error!"
.
format
(
mode
))
raise
ValueError
(
"Dataset mode={} Error!"
.
format
(
mode
))
...
...
contrib/LaneNet/train.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -40,10 +40,10 @@ from pdseg.utils.timer import Timer, calculate_eta
...
@@ -40,10 +40,10 @@ from pdseg.utils.timer import Timer, calculate_eta
from
reader
import
LaneNetDataset
from
reader
import
LaneNetDataset
from
models.model_builder
import
build_model
from
models.model_builder
import
build_model
from
models.model_builder
import
ModelPhase
from
models.model_builder
import
ModelPhase
from
models.model_builder
import
parse_shape_from_file
from
eval
import
evaluate
from
eval
import
evaluate
from
vis
import
visualize
from
vis
import
visualize
from
utils
import
dist_utils
from
utils
import
dist_utils
from
utils.load_model_utils
import
load_pretrained_weights
def
parse_args
():
def
parse_args
():
...
@@ -101,37 +101,6 @@ def parse_args():
...
@@ -101,37 +101,6 @@ def parse_args():
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
save_vars
(
executor
,
dirname
,
program
=
None
,
vars
=
None
):
"""
Temporary resolution for Win save variables compatability.
Will fix in PaddlePaddle v1.5.2
"""
save_program
=
fluid
.
Program
()
save_block
=
save_program
.
global_block
()
for
each_var
in
vars
:
# NOTE: don't save the variable which type is RAW
if
each_var
.
type
==
fluid
.
core
.
VarDesc
.
VarType
.
RAW
:
continue
new_var
=
save_block
.
create_var
(
name
=
each_var
.
name
,
shape
=
each_var
.
shape
,
dtype
=
each_var
.
dtype
,
type
=
each_var
.
type
,
lod_level
=
each_var
.
lod_level
,
persistable
=
True
)
file_path
=
os
.
path
.
join
(
dirname
,
new_var
.
name
)
file_path
=
os
.
path
.
normpath
(
file_path
)
save_block
.
append_op
(
type
=
'save'
,
inputs
=
{
'X'
:
[
new_var
]},
outputs
=
{},
attrs
=
{
'file_path'
:
file_path
})
executor
.
run
(
save_program
)
def
save_checkpoint
(
exe
,
program
,
ckpt_name
):
def
save_checkpoint
(
exe
,
program
,
ckpt_name
):
"""
"""
Save checkpoint for evaluation or resume training
Save checkpoint for evaluation or resume training
...
@@ -141,29 +110,22 @@ def save_checkpoint(exe, program, ckpt_name):
...
@@ -141,29 +110,22 @@ def save_checkpoint(exe, program, ckpt_name):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
os
.
makedirs
(
ckpt_dir
)
os
.
makedirs
(
ckpt_dir
)
save_vars
(
fluid
.
save
(
program
,
os
.
path
.
join
(
ckpt_dir
,
'model'
))
exe
,
ckpt_dir
,
program
,
vars
=
list
(
filter
(
fluid
.
io
.
is_persistable
,
program
.
list_vars
())))
return
ckpt_dir
return
ckpt_dir
def
load_checkpoint
(
exe
,
program
):
def
load_checkpoint
(
exe
,
program
):
"""
"""
Load checkpoiont f
rom pretrained model directory for resume
training
Load checkpoiont f
or resuming
training
"""
"""
print
(
'Resume model training from:'
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
)
if
not
os
.
path
.
exists
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
))
fluid
.
io
.
load_persistables
(
exe
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
,
main_program
=
program
)
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
print
(
'Resume model training from:'
,
model_path
)
if
not
os
.
path
.
exists
(
model_path
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
model_path
))
fluid
.
load
(
program
,
os
.
path
.
join
(
model_path
,
'model'
),
exe
)
# Check is path ended by path spearator
# Check is path ended by path spearator
if
model_path
[
-
1
]
==
os
.
sep
:
if
model_path
[
-
1
]
==
os
.
sep
:
model_path
=
model_path
[
0
:
-
1
]
model_path
=
model_path
[
0
:
-
1
]
...
@@ -178,7 +140,6 @@ def load_checkpoint(exe, program):
...
@@ -178,7 +140,6 @@ def load_checkpoint(exe, program):
else
:
else
:
raise
ValueError
(
"Resume model path is not valid!"
)
raise
ValueError
(
"Resume model path is not valid!"
)
print
(
"Model checkpoint loaded successfully!"
)
print
(
"Model checkpoint loaded successfully!"
)
return
begin_epoch
return
begin_epoch
...
@@ -271,44 +232,7 @@ def train(cfg):
...
@@ -271,44 +232,7 @@ def train(cfg):
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
# Load pretrained model
# Load pretrained model
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
print_info
(
'Pretrained model dir: '
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_pretrained_weights
(
exe
,
train_prog
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_vars
=
[]
load_fail_vars
=
[]
def
var_shape_matched
(
var
,
shape
):
"""
Check whehter persitable variable shape is match with current network
"""
var_exist
=
os
.
path
.
exists
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_exist
:
var_shape
=
parse_shape_from_file
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_shape
!=
shape
:
print
(
var
.
name
,
var_shape
,
shape
)
return
var_shape
==
shape
return
False
for
x
in
train_prog
.
list_vars
():
if
isinstance
(
x
,
fluid
.
framework
.
Parameter
):
shape
=
tuple
(
fluid
.
global_scope
().
find_var
(
x
.
name
).
get_tensor
().
shape
())
if
var_shape_matched
(
x
,
shape
):
load_vars
.
append
(
x
)
else
:
load_fail_vars
.
append
(
x
)
fluid
.
io
.
load_vars
(
exe
,
dirname
=
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
vars
=
load_vars
)
for
var
in
load_vars
:
print_info
(
"Parameter[{}] loaded sucessfully!"
.
format
(
var
.
name
))
for
var
in
load_fail_vars
:
print_info
(
"Parameter[{}] don't exist or shape does not match current network, skip"
" to load it."
.
format
(
var
.
name
))
print_info
(
"{}/{} pretrained parameters loaded successfully!"
.
format
(
len
(
load_vars
),
len
(
load_vars
)
+
len
(
load_fail_vars
)))
else
:
else
:
print_info
(
print_info
(
'Pretrained model dir {} not exists, training from scratch...'
.
'Pretrained model dir {} not exists, training from scratch...'
.
...
@@ -393,8 +317,7 @@ def train(cfg):
...
@@ -393,8 +317,7 @@ def train(cfg):
avg_emb_loss
,
avg_acc
,
avg_fp
,
avg_fn
,
speed
,
avg_emb_loss
,
avg_acc
,
avg_fp
,
avg_fn
,
speed
,
calculate_eta
(
all_step
-
step
,
speed
)))
calculate_eta
(
all_step
-
step
,
speed
)))
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
...
@@ -423,8 +346,7 @@ def train(cfg):
...
@@ -423,8 +346,7 @@ def train(cfg):
use_gpu
=
args
.
use_gpu
,
use_gpu
=
args
.
use_gpu
,
use_mpio
=
args
.
use_mpio
)
use_mpio
=
args
.
use_mpio
)
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Evaluate/accuracy'
,
accuracy
,
log_writer
.
add_scalar
(
'Evaluate/accuracy'
,
accuracy
,
step
)
step
)
log_writer
.
add_scalar
(
'Evaluate/fp'
,
fp
,
step
)
log_writer
.
add_scalar
(
'Evaluate/fp'
,
fp
,
step
)
log_writer
.
add_scalar
(
'Evaluate/fn'
,
fn
,
step
)
log_writer
.
add_scalar
(
'Evaluate/fn'
,
fn
,
step
)
...
...
contrib/LaneNet/utils/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
contrib/LaneNet/utils/config.py
浏览文件 @
7835c042
#
-*- coding: utf-8 -*-
#
coding: utf8
#
Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved
.
#
Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve
.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -81,7 +81,7 @@ cfg.DATASET.SEPARATOR = ' '
...
@@ -81,7 +81,7 @@ cfg.DATASET.SEPARATOR = ' '
# 忽略的像素标签值, 默认为255,一般无需改动
# 忽略的像素标签值, 默认为255,一般无需改动
cfg
.
DATASET
.
IGNORE_INDEX
=
255
cfg
.
DATASET
.
IGNORE_INDEX
=
255
# 数据增强是图像的padding值
# 数据增强是图像的padding值
cfg
.
DATASET
.
PADDING_VALUE
=
[
127.5
,
127.5
,
127.5
]
cfg
.
DATASET
.
PADDING_VALUE
=
[
127.5
,
127.5
,
127.5
]
########################### 数据增强配置 ######################################
########################### 数据增强配置 ######################################
# 图像镜像左右翻转
# 图像镜像左右翻转
...
...
contrib/LaneNet/utils/dist_utils.py
浏览文件 @
7835c042
#copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
#Licensed under the Apache License, Version 2.0 (the "License");
#
Licensed under the Apache License, Version 2.0 (the "License");
#you may not use this file except in compliance with the License.
#
you may not use this file except in compliance with the License.
#You may obtain a copy of the License at
#
You may obtain a copy of the License at
#
#
# http://www.apache.org/licenses/LICENSE-2.0
# http://www.apache.org/licenses/LICENSE-2.0
#
#
#Unless required by applicable law or agreed to in writing, software
#
Unless required by applicable law or agreed to in writing, software
#distributed under the License is distributed on an "AS IS" BASIS,
#
distributed under the License is distributed on an "AS IS" BASIS,
#WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#See the License for the specific language governing permissions and
#
See the License for the specific language governing permissions and
#limitations under the License.
#
limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
...
...
contrib/LaneNet/utils/generate_tusimple_dataset.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
"""
generate tusimple training dataset
generate tusimple training dataset
"""
"""
...
@@ -14,12 +28,16 @@ import numpy as np
...
@@ -14,12 +28,16 @@ import numpy as np
def
init_args
():
def
init_args
():
parser
=
argparse
.
ArgumentParser
()
parser
=
argparse
.
ArgumentParser
()
parser
.
add_argument
(
'--src_dir'
,
type
=
str
,
help
=
'The origin path of unzipped tusimple dataset'
)
parser
.
add_argument
(
'--src_dir'
,
type
=
str
,
help
=
'The origin path of unzipped tusimple dataset'
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
process_json_file
(
json_file_path
,
src_dir
,
ori_dst_dir
,
binary_dst_dir
,
instance_dst_dir
):
def
process_json_file
(
json_file_path
,
src_dir
,
ori_dst_dir
,
binary_dst_dir
,
instance_dst_dir
):
assert
ops
.
exists
(
json_file_path
),
'{:s} not exist'
.
format
(
json_file_path
)
assert
ops
.
exists
(
json_file_path
),
'{:s} not exist'
.
format
(
json_file_path
)
...
@@ -39,11 +57,14 @@ def process_json_file(json_file_path, src_dir, ori_dst_dir, binary_dst_dir, inst
...
@@ -39,11 +57,14 @@ def process_json_file(json_file_path, src_dir, ori_dst_dir, binary_dst_dir, inst
h_samples
=
info_dict
[
'h_samples'
]
h_samples
=
info_dict
[
'h_samples'
]
lanes
=
info_dict
[
'lanes'
]
lanes
=
info_dict
[
'lanes'
]
image_name_new
=
'{:s}.png'
.
format
(
'{:d}'
.
format
(
line_index
+
image_nums
).
zfill
(
4
))
image_name_new
=
'{:s}.png'
.
format
(
'{:d}'
.
format
(
line_index
+
image_nums
).
zfill
(
4
))
src_image
=
cv2
.
imread
(
image_path
,
cv2
.
IMREAD_COLOR
)
src_image
=
cv2
.
imread
(
image_path
,
cv2
.
IMREAD_COLOR
)
dst_binary_image
=
np
.
zeros
([
src_image
.
shape
[
0
],
src_image
.
shape
[
1
]],
np
.
uint8
)
dst_binary_image
=
np
.
zeros
(
dst_instance_image
=
np
.
zeros
([
src_image
.
shape
[
0
],
src_image
.
shape
[
1
]],
np
.
uint8
)
[
src_image
.
shape
[
0
],
src_image
.
shape
[
1
]],
np
.
uint8
)
dst_instance_image
=
np
.
zeros
(
[
src_image
.
shape
[
0
],
src_image
.
shape
[
1
]],
np
.
uint8
)
for
lane_index
,
lane
in
enumerate
(
lanes
):
for
lane_index
,
lane
in
enumerate
(
lanes
):
assert
len
(
h_samples
)
==
len
(
lane
)
assert
len
(
h_samples
)
==
len
(
lane
)
...
@@ -62,13 +83,23 @@ def process_json_file(json_file_path, src_dir, ori_dst_dir, binary_dst_dir, inst
...
@@ -62,13 +83,23 @@ def process_json_file(json_file_path, src_dir, ori_dst_dir, binary_dst_dir, inst
lane_pts
=
np
.
vstack
((
lane_x
,
lane_y
)).
transpose
()
lane_pts
=
np
.
vstack
((
lane_x
,
lane_y
)).
transpose
()
lane_pts
=
np
.
array
([
lane_pts
],
np
.
int64
)
lane_pts
=
np
.
array
([
lane_pts
],
np
.
int64
)
cv2
.
polylines
(
dst_binary_image
,
lane_pts
,
isClosed
=
False
,
cv2
.
polylines
(
color
=
255
,
thickness
=
5
)
dst_binary_image
,
cv2
.
polylines
(
dst_instance_image
,
lane_pts
,
isClosed
=
False
,
lane_pts
,
color
=
lane_index
*
50
+
20
,
thickness
=
5
)
isClosed
=
False
,
color
=
255
,
dst_binary_image_path
=
ops
.
join
(
src_dir
,
binary_dst_dir
,
image_name_new
)
thickness
=
5
)
dst_instance_image_path
=
ops
.
join
(
src_dir
,
instance_dst_dir
,
image_name_new
)
cv2
.
polylines
(
dst_instance_image
,
lane_pts
,
isClosed
=
False
,
color
=
lane_index
*
50
+
20
,
thickness
=
5
)
dst_binary_image_path
=
ops
.
join
(
src_dir
,
binary_dst_dir
,
image_name_new
)
dst_instance_image_path
=
ops
.
join
(
src_dir
,
instance_dst_dir
,
image_name_new
)
dst_rgb_image_path
=
ops
.
join
(
src_dir
,
ori_dst_dir
,
image_name_new
)
dst_rgb_image_path
=
ops
.
join
(
src_dir
,
ori_dst_dir
,
image_name_new
)
cv2
.
imwrite
(
dst_binary_image_path
,
dst_binary_image
)
cv2
.
imwrite
(
dst_binary_image_path
,
dst_binary_image
)
...
@@ -78,7 +109,12 @@ def process_json_file(json_file_path, src_dir, ori_dst_dir, binary_dst_dir, inst
...
@@ -78,7 +109,12 @@ def process_json_file(json_file_path, src_dir, ori_dst_dir, binary_dst_dir, inst
print
(
'Process {:s} success'
.
format
(
image_name
))
print
(
'Process {:s} success'
.
format
(
image_name
))
def
gen_sample
(
src_dir
,
b_gt_image_dir
,
i_gt_image_dir
,
image_dir
,
phase
=
'train'
,
split
=
False
):
def
gen_sample
(
src_dir
,
b_gt_image_dir
,
i_gt_image_dir
,
image_dir
,
phase
=
'train'
,
split
=
False
):
label_list
=
[]
label_list
=
[]
with
open
(
'{:s}/{}ing/{}.txt'
.
format
(
src_dir
,
phase
,
phase
),
'w'
)
as
file
:
with
open
(
'{:s}/{}ing/{}.txt'
.
format
(
src_dir
,
phase
,
phase
),
'w'
)
as
file
:
...
@@ -92,7 +128,8 @@ def gen_sample(src_dir, b_gt_image_dir, i_gt_image_dir, image_dir, phase='train'
...
@@ -92,7 +128,8 @@ def gen_sample(src_dir, b_gt_image_dir, i_gt_image_dir, image_dir, phase='train'
image_path
=
ops
.
join
(
image_dir
,
image_name
)
image_path
=
ops
.
join
(
image_dir
,
image_name
)
assert
ops
.
exists
(
image_path
),
'{:s} not exist'
.
format
(
image_path
)
assert
ops
.
exists
(
image_path
),
'{:s} not exist'
.
format
(
image_path
)
assert
ops
.
exists
(
instance_gt_image_path
),
'{:s} not exist'
.
format
(
instance_gt_image_path
)
assert
ops
.
exists
(
instance_gt_image_path
),
'{:s} not exist'
.
format
(
instance_gt_image_path
)
b_gt_image
=
cv2
.
imread
(
binary_gt_image_path
,
cv2
.
IMREAD_COLOR
)
b_gt_image
=
cv2
.
imread
(
binary_gt_image_path
,
cv2
.
IMREAD_COLOR
)
i_gt_image
=
cv2
.
imread
(
instance_gt_image_path
,
cv2
.
IMREAD_COLOR
)
i_gt_image
=
cv2
.
imread
(
instance_gt_image_path
,
cv2
.
IMREAD_COLOR
)
...
@@ -102,7 +139,8 @@ def gen_sample(src_dir, b_gt_image_dir, i_gt_image_dir, image_dir, phase='train'
...
@@ -102,7 +139,8 @@ def gen_sample(src_dir, b_gt_image_dir, i_gt_image_dir, image_dir, phase='train'
print
(
'image: {:s} corrupt'
.
format
(
image_name
))
print
(
'image: {:s} corrupt'
.
format
(
image_name
))
continue
continue
else
:
else
:
info
=
'{:s} {:s} {:s}'
.
format
(
image_path
,
binary_gt_image_path
,
instance_gt_image_path
)
info
=
'{:s} {:s} {:s}'
.
format
(
image_path
,
binary_gt_image_path
,
instance_gt_image_path
)
file
.
write
(
info
+
'
\n
'
)
file
.
write
(
info
+
'
\n
'
)
label_list
.
append
(
info
)
label_list
.
append
(
info
)
if
phase
==
'train'
and
split
:
if
phase
==
'train'
and
split
:
...
@@ -110,10 +148,12 @@ def gen_sample(src_dir, b_gt_image_dir, i_gt_image_dir, image_dir, phase='train'
...
@@ -110,10 +148,12 @@ def gen_sample(src_dir, b_gt_image_dir, i_gt_image_dir, image_dir, phase='train'
val_list_len
=
len
(
label_list
)
//
10
val_list_len
=
len
(
label_list
)
//
10
val_label_list
=
label_list
[:
val_list_len
]
val_label_list
=
label_list
[:
val_list_len
]
train_label_list
=
label_list
[
val_list_len
:]
train_label_list
=
label_list
[
val_list_len
:]
with
open
(
'{:s}/{}ing/train_part.txt'
.
format
(
src_dir
,
phase
,
phase
),
'w'
)
as
file
:
with
open
(
'{:s}/{}ing/train_part.txt'
.
format
(
src_dir
,
phase
,
phase
),
'w'
)
as
file
:
for
info
in
train_label_list
:
for
info
in
train_label_list
:
file
.
write
(
info
+
'
\n
'
)
file
.
write
(
info
+
'
\n
'
)
with
open
(
'{:s}/{}ing/val_part.txt'
.
format
(
src_dir
,
phase
,
phase
),
'w'
)
as
file
:
with
open
(
'{:s}/{}ing/val_part.txt'
.
format
(
src_dir
,
phase
,
phase
),
'w'
)
as
file
:
for
info
in
val_label_list
:
for
info
in
val_label_list
:
file
.
write
(
info
+
'
\n
'
)
file
.
write
(
info
+
'
\n
'
)
return
return
...
@@ -130,12 +170,14 @@ def process_tusimple_dataset(src_dir):
...
@@ -130,12 +170,14 @@ def process_tusimple_dataset(src_dir):
for
json_label_path
in
glob
.
glob
(
'{:s}/label*.json'
.
format
(
src_dir
)):
for
json_label_path
in
glob
.
glob
(
'{:s}/label*.json'
.
format
(
src_dir
)):
json_label_name
=
ops
.
split
(
json_label_path
)[
1
]
json_label_name
=
ops
.
split
(
json_label_path
)[
1
]
shutil
.
copyfile
(
json_label_path
,
ops
.
join
(
traing_folder_path
,
json_label_name
))
shutil
.
copyfile
(
json_label_path
,
ops
.
join
(
traing_folder_path
,
json_label_name
))
for
json_label_path
in
glob
.
glob
(
'{:s}/test_label.json'
.
format
(
src_dir
)):
for
json_label_path
in
glob
.
glob
(
'{:s}/test_label.json'
.
format
(
src_dir
)):
json_label_name
=
ops
.
split
(
json_label_path
)[
1
]
json_label_name
=
ops
.
split
(
json_label_path
)[
1
]
shutil
.
copyfile
(
json_label_path
,
ops
.
join
(
testing_folder_path
,
json_label_name
))
shutil
.
copyfile
(
json_label_path
,
ops
.
join
(
testing_folder_path
,
json_label_name
))
train_gt_image_dir
=
ops
.
join
(
'training'
,
'gt_image'
)
train_gt_image_dir
=
ops
.
join
(
'training'
,
'gt_image'
)
train_gt_binary_dir
=
ops
.
join
(
'training'
,
'gt_binary_image'
)
train_gt_binary_dir
=
ops
.
join
(
'training'
,
'gt_binary_image'
)
...
@@ -154,9 +196,11 @@ def process_tusimple_dataset(src_dir):
...
@@ -154,9 +196,11 @@ def process_tusimple_dataset(src_dir):
os
.
makedirs
(
os
.
path
.
join
(
src_dir
,
test_gt_instance_dir
),
exist_ok
=
True
)
os
.
makedirs
(
os
.
path
.
join
(
src_dir
,
test_gt_instance_dir
),
exist_ok
=
True
)
for
json_label_path
in
glob
.
glob
(
'{:s}/*.json'
.
format
(
traing_folder_path
)):
for
json_label_path
in
glob
.
glob
(
'{:s}/*.json'
.
format
(
traing_folder_path
)):
process_json_file
(
json_label_path
,
src_dir
,
train_gt_image_dir
,
train_gt_binary_dir
,
train_gt_instance_dir
)
process_json_file
(
json_label_path
,
src_dir
,
train_gt_image_dir
,
train_gt_binary_dir
,
train_gt_instance_dir
)
gen_sample
(
src_dir
,
train_gt_binary_dir
,
train_gt_instance_dir
,
train_gt_image_dir
,
'train'
,
True
)
gen_sample
(
src_dir
,
train_gt_binary_dir
,
train_gt_instance_dir
,
train_gt_image_dir
,
'train'
,
True
)
if
__name__
==
'__main__'
:
if
__name__
==
'__main__'
:
...
...
contrib/LaneNet/utils/lanenet_postprocess.py
浏览文件 @
7835c042
#!/usr/bin/env python3
# coding: utf8
# -*- coding: utf-8 -*-
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# this code heavily base on https://github.com/MaybeShewill-CV/lanenet-lane-detection/blob/master/lanenet_model/lanenet_postprocess.py
# this code heavily base on https://github.com/MaybeShewill-CV/lanenet-lane-detection/blob/master/lanenet_model/lanenet_postprocess.py
"""
"""
LaneNet model post process
LaneNet model post process
...
@@ -22,12 +35,14 @@ def _morphological_process(image, kernel_size=5):
...
@@ -22,12 +35,14 @@ def _morphological_process(image, kernel_size=5):
:return:
:return:
"""
"""
if
len
(
image
.
shape
)
==
3
:
if
len
(
image
.
shape
)
==
3
:
raise
ValueError
(
'Binary segmentation result image should be a single channel image'
)
raise
ValueError
(
'Binary segmentation result image should be a single channel image'
)
if
image
.
dtype
is
not
np
.
uint8
:
if
image
.
dtype
is
not
np
.
uint8
:
image
=
np
.
array
(
image
,
np
.
uint8
)
image
=
np
.
array
(
image
,
np
.
uint8
)
kernel
=
cv2
.
getStructuringElement
(
shape
=
cv2
.
MORPH_ELLIPSE
,
ksize
=
(
kernel_size
,
kernel_size
))
kernel
=
cv2
.
getStructuringElement
(
shape
=
cv2
.
MORPH_ELLIPSE
,
ksize
=
(
kernel_size
,
kernel_size
))
# close operation fille hole
# close operation fille hole
closing
=
cv2
.
morphologyEx
(
image
,
cv2
.
MORPH_CLOSE
,
kernel
,
iterations
=
1
)
closing
=
cv2
.
morphologyEx
(
image
,
cv2
.
MORPH_CLOSE
,
kernel
,
iterations
=
1
)
...
@@ -46,13 +61,15 @@ def _connect_components_analysis(image):
...
@@ -46,13 +61,15 @@ def _connect_components_analysis(image):
else
:
else
:
gray_image
=
image
gray_image
=
image
return
cv2
.
connectedComponentsWithStats
(
gray_image
,
connectivity
=
8
,
ltype
=
cv2
.
CV_32S
)
return
cv2
.
connectedComponentsWithStats
(
gray_image
,
connectivity
=
8
,
ltype
=
cv2
.
CV_32S
)
class
_LaneFeat
(
object
):
class
_LaneFeat
(
object
):
"""
"""
"""
"""
def
__init__
(
self
,
feat
,
coord
,
class_id
=-
1
):
def
__init__
(
self
,
feat
,
coord
,
class_id
=-
1
):
"""
"""
lane feat object
lane feat object
...
@@ -108,18 +125,21 @@ class _LaneNetCluster(object):
...
@@ -108,18 +125,21 @@ class _LaneNetCluster(object):
"""
"""
Instance segmentation result cluster
Instance segmentation result cluster
"""
"""
def
__init__
(
self
):
def
__init__
(
self
):
"""
"""
"""
"""
self
.
_color_map
=
[
np
.
array
([
255
,
0
,
0
]),
self
.
_color_map
=
[
np
.
array
([
255
,
0
,
0
]),
np
.
array
([
0
,
255
,
0
]),
np
.
array
([
0
,
255
,
0
]),
np
.
array
([
0
,
0
,
255
]),
np
.
array
([
0
,
0
,
255
]),
np
.
array
([
125
,
125
,
0
]),
np
.
array
([
125
,
125
,
0
]),
np
.
array
([
0
,
125
,
125
]),
np
.
array
([
0
,
125
,
125
]),
np
.
array
([
125
,
0
,
125
]),
np
.
array
([
125
,
0
,
125
]),
np
.
array
([
50
,
100
,
50
]),
np
.
array
([
50
,
100
,
50
]),
np
.
array
([
100
,
50
,
100
])]
np
.
array
([
100
,
50
,
100
])
]
@
staticmethod
@
staticmethod
def
_embedding_feats_dbscan_cluster
(
embedding_image_feats
):
def
_embedding_feats_dbscan_cluster
(
embedding_image_feats
):
...
@@ -186,15 +206,16 @@ class _LaneNetCluster(object):
...
@@ -186,15 +206,16 @@ class _LaneNetCluster(object):
# get embedding feats and coords
# get embedding feats and coords
get_lane_embedding_feats_result
=
self
.
_get_lane_embedding_feats
(
get_lane_embedding_feats_result
=
self
.
_get_lane_embedding_feats
(
binary_seg_ret
=
binary_seg_result
,
binary_seg_ret
=
binary_seg_result
,
instance_seg_ret
=
instance_seg_result
instance_seg_ret
=
instance_seg_result
)
)
# dbscan cluster
# dbscan cluster
dbscan_cluster_result
=
self
.
_embedding_feats_dbscan_cluster
(
dbscan_cluster_result
=
self
.
_embedding_feats_dbscan_cluster
(
embedding_image_feats
=
get_lane_embedding_feats_result
[
'lane_embedding_feats'
]
embedding_image_feats
=
get_lane_embedding_feats_result
[
)
'lane_embedding_feats'
]
)
mask
=
np
.
zeros
(
shape
=
[
binary_seg_result
.
shape
[
0
],
binary_seg_result
.
shape
[
1
],
3
],
dtype
=
np
.
uint8
)
mask
=
np
.
zeros
(
shape
=
[
binary_seg_result
.
shape
[
0
],
binary_seg_result
.
shape
[
1
],
3
],
dtype
=
np
.
uint8
)
db_labels
=
dbscan_cluster_result
[
'db_labels'
]
db_labels
=
dbscan_cluster_result
[
'db_labels'
]
unique_labels
=
dbscan_cluster_result
[
'unique_labels'
]
unique_labels
=
dbscan_cluster_result
[
'unique_labels'
]
coord
=
get_lane_embedding_feats_result
[
'lane_coordinates'
]
coord
=
get_lane_embedding_feats_result
[
'lane_coordinates'
]
...
@@ -219,11 +240,13 @@ class LaneNetPostProcessor(object):
...
@@ -219,11 +240,13 @@ class LaneNetPostProcessor(object):
"""
"""
lanenet post process for lane generation
lanenet post process for lane generation
"""
"""
def
__init__
(
self
,
ipm_remap_file_path
=
'./utils/tusimple_ipm_remap.yml'
):
def
__init__
(
self
,
ipm_remap_file_path
=
'./utils/tusimple_ipm_remap.yml'
):
"""
"""
convert front car view to bird view
convert front car view to bird view
"""
"""
assert
ops
.
exists
(
ipm_remap_file_path
),
'{:s} not exist'
.
format
(
ipm_remap_file_path
)
assert
ops
.
exists
(
ipm_remap_file_path
),
'{:s} not exist'
.
format
(
ipm_remap_file_path
)
self
.
_cluster
=
_LaneNetCluster
()
self
.
_cluster
=
_LaneNetCluster
()
self
.
_ipm_remap_file_path
=
ipm_remap_file_path
self
.
_ipm_remap_file_path
=
ipm_remap_file_path
...
@@ -232,14 +255,16 @@ class LaneNetPostProcessor(object):
...
@@ -232,14 +255,16 @@ class LaneNetPostProcessor(object):
self
.
_remap_to_ipm_x
=
remap_file_load_ret
[
'remap_to_ipm_x'
]
self
.
_remap_to_ipm_x
=
remap_file_load_ret
[
'remap_to_ipm_x'
]
self
.
_remap_to_ipm_y
=
remap_file_load_ret
[
'remap_to_ipm_y'
]
self
.
_remap_to_ipm_y
=
remap_file_load_ret
[
'remap_to_ipm_y'
]
self
.
_color_map
=
[
np
.
array
([
255
,
0
,
0
]),
self
.
_color_map
=
[
np
.
array
([
255
,
0
,
0
]),
np
.
array
([
0
,
255
,
0
]),
np
.
array
([
0
,
255
,
0
]),
np
.
array
([
0
,
0
,
255
]),
np
.
array
([
0
,
0
,
255
]),
np
.
array
([
125
,
125
,
0
]),
np
.
array
([
125
,
125
,
0
]),
np
.
array
([
0
,
125
,
125
]),
np
.
array
([
0
,
125
,
125
]),
np
.
array
([
125
,
0
,
125
]),
np
.
array
([
125
,
0
,
125
]),
np
.
array
([
50
,
100
,
50
]),
np
.
array
([
50
,
100
,
50
]),
np
.
array
([
100
,
50
,
100
])]
np
.
array
([
100
,
50
,
100
])
]
def
_load_remap_matrix
(
self
):
def
_load_remap_matrix
(
self
):
fs
=
cv2
.
FileStorage
(
self
.
_ipm_remap_file_path
,
cv2
.
FILE_STORAGE_READ
)
fs
=
cv2
.
FileStorage
(
self
.
_ipm_remap_file_path
,
cv2
.
FILE_STORAGE_READ
)
...
@@ -256,15 +281,20 @@ class LaneNetPostProcessor(object):
...
@@ -256,15 +281,20 @@ class LaneNetPostProcessor(object):
return
ret
return
ret
def
postprocess
(
self
,
binary_seg_result
,
instance_seg_result
=
None
,
def
postprocess
(
self
,
min_area_threshold
=
100
,
source_image
=
None
,
binary_seg_result
,
instance_seg_result
=
None
,
min_area_threshold
=
100
,
source_image
=
None
,
data_source
=
'tusimple'
):
data_source
=
'tusimple'
):
# convert binary_seg_result
# convert binary_seg_result
binary_seg_result
=
np
.
array
(
binary_seg_result
*
255
,
dtype
=
np
.
uint8
)
binary_seg_result
=
np
.
array
(
binary_seg_result
*
255
,
dtype
=
np
.
uint8
)
# apply image morphology operation to fill in the hold and reduce the small area
# apply image morphology operation to fill in the hold and reduce the small area
morphological_ret
=
_morphological_process
(
binary_seg_result
,
kernel_size
=
5
)
morphological_ret
=
_morphological_process
(
connect_components_analysis_ret
=
_connect_components_analysis
(
image
=
morphological_ret
)
binary_seg_result
,
kernel_size
=
5
)
connect_components_analysis_ret
=
_connect_components_analysis
(
image
=
morphological_ret
)
labels
=
connect_components_analysis_ret
[
1
]
labels
=
connect_components_analysis_ret
[
1
]
stats
=
connect_components_analysis_ret
[
2
]
stats
=
connect_components_analysis_ret
[
2
]
...
@@ -276,8 +306,7 @@ class LaneNetPostProcessor(object):
...
@@ -276,8 +306,7 @@ class LaneNetPostProcessor(object):
# apply embedding features cluster
# apply embedding features cluster
mask_image
,
lane_coords
=
self
.
_cluster
.
apply_lane_feats_cluster
(
mask_image
,
lane_coords
=
self
.
_cluster
.
apply_lane_feats_cluster
(
binary_seg_result
=
morphological_ret
,
binary_seg_result
=
morphological_ret
,
instance_seg_result
=
instance_seg_result
instance_seg_result
=
instance_seg_result
)
)
if
mask_image
is
None
:
if
mask_image
is
None
:
return
{
return
{
...
@@ -292,15 +321,15 @@ class LaneNetPostProcessor(object):
...
@@ -292,15 +321,15 @@ class LaneNetPostProcessor(object):
for
lane_index
,
coords
in
enumerate
(
lane_coords
):
for
lane_index
,
coords
in
enumerate
(
lane_coords
):
if
data_source
==
'tusimple'
:
if
data_source
==
'tusimple'
:
tmp_mask
=
np
.
zeros
(
shape
=
(
720
,
1280
),
dtype
=
np
.
uint8
)
tmp_mask
=
np
.
zeros
(
shape
=
(
720
,
1280
),
dtype
=
np
.
uint8
)
tmp_mask
[
tuple
((
np
.
int_
(
coords
[:,
1
]
*
720
/
256
),
np
.
int_
(
coords
[:,
0
]
*
1280
/
512
)))]
=
255
tmp_mask
[
tuple
((
np
.
int_
(
coords
[:,
1
]
*
720
/
256
),
np
.
int_
(
coords
[:,
0
]
*
1280
/
512
)))]
=
255
else
:
else
:
raise
ValueError
(
'Wrong data source now only support tusimple'
)
raise
ValueError
(
'Wrong data source now only support tusimple'
)
tmp_ipm_mask
=
cv2
.
remap
(
tmp_ipm_mask
=
cv2
.
remap
(
tmp_mask
,
tmp_mask
,
self
.
_remap_to_ipm_x
,
self
.
_remap_to_ipm_x
,
self
.
_remap_to_ipm_y
,
self
.
_remap_to_ipm_y
,
interpolation
=
cv2
.
INTER_NEAREST
interpolation
=
cv2
.
INTER_NEAREST
)
)
nonzero_y
=
np
.
array
(
tmp_ipm_mask
.
nonzero
()[
0
])
nonzero_y
=
np
.
array
(
tmp_ipm_mask
.
nonzero
()[
0
])
nonzero_x
=
np
.
array
(
tmp_ipm_mask
.
nonzero
()[
1
])
nonzero_x
=
np
.
array
(
tmp_ipm_mask
.
nonzero
()[
1
])
...
@@ -309,16 +338,19 @@ class LaneNetPostProcessor(object):
...
@@ -309,16 +338,19 @@ class LaneNetPostProcessor(object):
[
ipm_image_height
,
ipm_image_width
]
=
tmp_ipm_mask
.
shape
[
ipm_image_height
,
ipm_image_width
]
=
tmp_ipm_mask
.
shape
plot_y
=
np
.
linspace
(
10
,
ipm_image_height
,
ipm_image_height
-
10
)
plot_y
=
np
.
linspace
(
10
,
ipm_image_height
,
ipm_image_height
-
10
)
fit_x
=
fit_param
[
0
]
*
plot_y
**
2
+
fit_param
[
1
]
*
plot_y
+
fit_param
[
2
]
fit_x
=
fit_param
[
0
]
*
plot_y
**
2
+
fit_param
[
1
]
*
plot_y
+
fit_param
[
2
]
lane_pts
=
[]
lane_pts
=
[]
for
index
in
range
(
0
,
plot_y
.
shape
[
0
],
5
):
for
index
in
range
(
0
,
plot_y
.
shape
[
0
],
5
):
src_x
=
self
.
_remap_to_ipm_x
[
src_x
=
self
.
_remap_to_ipm_x
[
int
(
plot_y
[
index
]),
int
(
np
.
clip
(
fit_x
[
index
],
0
,
ipm_image_width
-
1
))]
int
(
plot_y
[
index
]),
int
(
np
.
clip
(
fit_x
[
index
],
0
,
ipm_image_width
-
1
))]
if
src_x
<=
0
:
if
src_x
<=
0
:
continue
continue
src_y
=
self
.
_remap_to_ipm_y
[
src_y
=
self
.
_remap_to_ipm_y
[
int
(
plot_y
[
index
]),
int
(
np
.
clip
(
fit_x
[
index
],
0
,
ipm_image_width
-
1
))]
int
(
plot_y
[
index
]),
int
(
np
.
clip
(
fit_x
[
index
],
0
,
ipm_image_width
-
1
))]
src_y
=
src_y
if
src_y
>
0
else
0
src_y
=
src_y
if
src_y
>
0
else
0
lane_pts
.
append
([
src_x
,
src_y
])
lane_pts
.
append
([
src_x
,
src_y
])
...
@@ -366,8 +398,10 @@ class LaneNetPostProcessor(object):
...
@@ -366,8 +398,10 @@ class LaneNetPostProcessor(object):
continue
continue
lane_color
=
self
.
_color_map
[
index
].
tolist
()
lane_color
=
self
.
_color_map
[
index
].
tolist
()
cv2
.
circle
(
source_image
,
(
int
(
interpolation_src_pt_x
),
cv2
.
circle
(
int
(
interpolation_src_pt_y
)),
5
,
lane_color
,
-
1
)
source_image
,
(
int
(
interpolation_src_pt_x
),
int
(
interpolation_src_pt_y
)),
5
,
lane_color
,
-
1
)
ret
=
{
ret
=
{
'mask_image'
:
mask_image
,
'mask_image'
:
mask_image
,
'fit_params'
:
fit_params
,
'fit_params'
:
fit_params
,
...
...
contrib/LaneNet/utils/load_model_utils.py
0 → 100644
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os
import
os.path
as
osp
import
six
import
numpy
as
np
def
parse_param_file
(
param_file
,
return_shape
=
True
):
from
paddle.fluid.proto.framework_pb2
import
VarType
f
=
open
(
param_file
,
'rb'
)
version
=
np
.
fromstring
(
f
.
read
(
4
),
dtype
=
'int32'
)
lod_level
=
np
.
fromstring
(
f
.
read
(
8
),
dtype
=
'int64'
)
for
i
in
range
(
int
(
lod_level
)):
_size
=
np
.
fromstring
(
f
.
read
(
8
),
dtype
=
'int64'
)
_
=
f
.
read
(
_size
)
version
=
np
.
fromstring
(
f
.
read
(
4
),
dtype
=
'int32'
)
tensor_desc
=
VarType
.
TensorDesc
()
tensor_desc_size
=
np
.
fromstring
(
f
.
read
(
4
),
dtype
=
'int32'
)
tensor_desc
.
ParseFromString
(
f
.
read
(
int
(
tensor_desc_size
)))
tensor_shape
=
tuple
(
tensor_desc
.
dims
)
if
return_shape
:
f
.
close
()
return
tuple
(
tensor_desc
.
dims
)
if
tensor_desc
.
data_type
!=
5
:
raise
Exception
(
"Unexpected data type while parse {}"
.
format
(
param_file
))
data_size
=
4
for
i
in
range
(
len
(
tensor_shape
)):
data_size
*=
tensor_shape
[
i
]
weight
=
np
.
fromstring
(
f
.
read
(
data_size
),
dtype
=
'float32'
)
f
.
close
()
return
np
.
reshape
(
weight
,
tensor_shape
)
def
load_pdparams
(
exe
,
main_prog
,
model_dir
):
import
paddle.fluid
as
fluid
from
paddle.fluid.proto.framework_pb2
import
VarType
from
paddle.fluid.framework
import
Program
vars_to_load
=
list
()
vars_not_load
=
list
()
import
pickle
with
open
(
osp
.
join
(
model_dir
,
'model.pdparams'
),
'rb'
)
as
f
:
params_dict
=
pickle
.
load
(
f
)
if
six
.
PY2
else
pickle
.
load
(
f
,
encoding
=
'latin1'
)
unused_vars
=
list
()
for
var
in
main_prog
.
list_vars
():
if
not
isinstance
(
var
,
fluid
.
framework
.
Parameter
):
continue
if
var
.
name
not
in
params_dict
:
print
(
"{} is not in saved model"
.
format
(
var
.
name
))
vars_not_load
.
append
(
var
.
name
)
continue
if
var
.
shape
!=
params_dict
[
var
.
name
].
shape
:
unused_vars
.
append
(
var
.
name
)
vars_not_load
.
append
(
var
.
name
)
print
(
"[SKIP] Shape of pretrained weight {} doesn't match.(Pretrained: {}, Actual: {})"
.
format
(
var
.
name
,
params_dict
[
var
.
name
].
shape
,
var
.
shape
))
continue
vars_to_load
.
append
(
var
)
for
var_name
in
unused_vars
:
del
params_dict
[
var_name
]
fluid
.
io
.
set_program_state
(
main_prog
,
params_dict
)
if
len
(
vars_to_load
)
==
0
:
print
(
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
)
else
:
print
(
"There are {}/{} varaibles in {} are loaded."
.
format
(
len
(
vars_to_load
),
len
(
vars_to_load
)
+
len
(
vars_not_load
),
model_dir
))
def
load_pretrained_weights
(
exe
,
main_prog
,
weights_dir
):
if
not
osp
.
exists
(
weights_dir
):
raise
Exception
(
"Path {} not exists."
.
format
(
weights_dir
))
if
osp
.
exists
(
osp
.
join
(
weights_dir
,
"model.pdparams"
)):
return
load_pdparams
(
exe
,
main_prog
,
weights_dir
)
import
paddle.fluid
as
fluid
vars_to_load
=
list
()
vars_not_load
=
list
()
for
var
in
main_prog
.
list_vars
():
if
not
isinstance
(
var
,
fluid
.
framework
.
Parameter
):
continue
if
not
osp
.
exists
(
osp
.
join
(
weights_dir
,
var
.
name
)):
print
(
"[SKIP] Pretrained weight {}/{} doesn't exist"
.
format
(
weights_dir
,
var
.
name
))
vars_not_load
.
append
(
var
)
continue
pretrained_shape
=
parse_param_file
(
osp
.
join
(
weights_dir
,
var
.
name
))
actual_shape
=
tuple
(
var
.
shape
)
if
pretrained_shape
!=
actual_shape
:
print
(
"[SKIP] Shape of pretrained weight {}/{} doesn't match.(Pretrained: {}, Actual: {})"
.
format
(
weights_dir
,
var
.
name
,
pretrained_shape
,
actual_shape
))
vars_not_load
.
append
(
var
)
continue
vars_to_load
.
append
(
var
)
params_dict
=
fluid
.
io
.
load_program_state
(
weights_dir
,
var_list
=
vars_to_load
)
fluid
.
io
.
set_program_state
(
main_prog
,
params_dict
)
if
len
(
vars_to_load
)
==
0
:
print
(
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
)
else
:
print
(
"There are {}/{} varaibles in {} are loaded."
.
format
(
len
(
vars_to_load
),
len
(
vars_to_load
)
+
len
(
vars_not_load
),
weights_dir
))
contrib/LaneNet/vis.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -45,6 +45,7 @@ from models.model_builder import ModelPhase
...
@@ -45,6 +45,7 @@ from models.model_builder import ModelPhase
from
utils
import
lanenet_postprocess
from
utils
import
lanenet_postprocess
import
matplotlib.pyplot
as
plt
import
matplotlib.pyplot
as
plt
def
parse_args
():
def
parse_args
():
parser
=
argparse
.
ArgumentParser
(
description
=
'PaddeSeg visualization tools'
)
parser
=
argparse
.
ArgumentParser
(
description
=
'PaddeSeg visualization tools'
)
parser
.
add_argument
(
parser
.
add_argument
(
...
@@ -106,7 +107,6 @@ def minmax_scale(input_arr):
...
@@ -106,7 +107,6 @@ def minmax_scale(input_arr):
return
output_arr
return
output_arr
def
visualize
(
cfg
,
def
visualize
(
cfg
,
vis_file_list
=
None
,
vis_file_list
=
None
,
use_gpu
=
False
,
use_gpu
=
False
,
...
@@ -119,7 +119,6 @@ def visualize(cfg,
...
@@ -119,7 +119,6 @@ def visualize(cfg,
if
vis_file_list
is
None
:
if
vis_file_list
is
None
:
vis_file_list
=
cfg
.
DATASET
.
TEST_FILE_LIST
vis_file_list
=
cfg
.
DATASET
.
TEST_FILE_LIST
dataset
=
LaneNetDataset
(
dataset
=
LaneNetDataset
(
file_list
=
vis_file_list
,
file_list
=
vis_file_list
,
mode
=
ModelPhase
.
VISUAL
,
mode
=
ModelPhase
.
VISUAL
,
...
@@ -139,6 +138,11 @@ def visualize(cfg,
...
@@ -139,6 +138,11 @@ def visualize(cfg,
ckpt_dir
=
cfg
.
TEST
.
TEST_MODEL
if
not
ckpt_dir
else
ckpt_dir
ckpt_dir
=
cfg
.
TEST
.
TEST_MODEL
if
not
ckpt_dir
else
ckpt_dir
if
ckpt_dir
is
not
None
:
print
(
'load test model:'
,
ckpt_dir
)
try
:
fluid
.
load
(
test_prog
,
os
.
path
.
join
(
ckpt_dir
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
save_dir
=
os
.
path
.
join
(
vis_dir
,
'visual_results'
)
save_dir
=
os
.
path
.
join
(
vis_dir
,
'visual_results'
)
...
@@ -161,22 +165,26 @@ def visualize(cfg,
...
@@ -161,22 +165,26 @@ def visualize(cfg,
for
i
in
range
(
num_imgs
):
for
i
in
range
(
num_imgs
):
gt_image
=
org_imgs
[
i
]
gt_image
=
org_imgs
[
i
]
binary_seg_image
,
instance_seg_image
=
segLogits
[
i
].
squeeze
(
-
1
),
emLogits
[
i
].
transpose
((
1
,
2
,
0
))
binary_seg_image
,
instance_seg_image
=
segLogits
[
i
].
squeeze
(
-
1
),
emLogits
[
i
].
transpose
((
1
,
2
,
0
))
postprocess_result
=
postprocessor
.
postprocess
(
postprocess_result
=
postprocessor
.
postprocess
(
binary_seg_result
=
binary_seg_image
,
binary_seg_result
=
binary_seg_image
,
instance_seg_result
=
instance_seg_image
,
instance_seg_result
=
instance_seg_image
,
source_image
=
gt_image
source_image
=
gt_image
)
)
pred_binary_fn
=
os
.
path
.
join
(
pred_binary_fn
=
os
.
path
.
join
(
save_dir
,
to_png_fn
(
img_names
[
i
],
name
=
'_pred_binary'
))
save_dir
,
to_png_fn
(
img_names
[
i
],
name
=
'_pred_binary'
))
pred_lane_fn
=
os
.
path
.
join
(
save_dir
,
to_png_fn
(
img_names
[
i
],
name
=
'_pred_lane'
))
pred_lane_fn
=
os
.
path
.
join
(
pred_instance_fn
=
os
.
path
.
join
(
save_dir
,
to_png_fn
(
img_names
[
i
],
name
=
'_pred_instance'
))
save_dir
,
to_png_fn
(
img_names
[
i
],
name
=
'_pred_lane'
))
pred_instance_fn
=
os
.
path
.
join
(
save_dir
,
to_png_fn
(
img_names
[
i
],
name
=
'_pred_instance'
))
dirname
=
os
.
path
.
dirname
(
pred_binary_fn
)
dirname
=
os
.
path
.
dirname
(
pred_binary_fn
)
makedirs
(
dirname
)
makedirs
(
dirname
)
mask_image
=
postprocess_result
[
'mask_image'
]
mask_image
=
postprocess_result
[
'mask_image'
]
for
i
in
range
(
4
):
for
i
in
range
(
4
):
instance_seg_image
[:,
:,
i
]
=
minmax_scale
(
instance_seg_image
[:,
:,
i
])
instance_seg_image
[:,
:,
i
]
=
minmax_scale
(
instance_seg_image
[:,
:,
i
])
embedding_image
=
np
.
array
(
instance_seg_image
).
astype
(
np
.
uint8
)
embedding_image
=
np
.
array
(
instance_seg_image
).
astype
(
np
.
uint8
)
plt
.
figure
(
'mask_image'
)
plt
.
figure
(
'mask_image'
)
...
@@ -189,13 +197,13 @@ def visualize(cfg,
...
@@ -189,13 +197,13 @@ def visualize(cfg,
plt
.
imshow
(
binary_seg_image
*
255
,
cmap
=
'gray'
)
plt
.
imshow
(
binary_seg_image
*
255
,
cmap
=
'gray'
)
plt
.
show
()
plt
.
show
()
cv2
.
imwrite
(
pred_binary_fn
,
np
.
array
(
binary_seg_image
*
255
).
astype
(
np
.
uint8
))
cv2
.
imwrite
(
pred_binary_fn
,
np
.
array
(
binary_seg_image
*
255
).
astype
(
np
.
uint8
))
cv2
.
imwrite
(
pred_lane_fn
,
postprocess_result
[
'source_image'
])
cv2
.
imwrite
(
pred_lane_fn
,
postprocess_result
[
'source_image'
])
cv2
.
imwrite
(
pred_instance_fn
,
mask_image
)
cv2
.
imwrite
(
pred_instance_fn
,
mask_image
)
print
(
pred_lane_fn
,
'saved!'
)
print
(
pred_lane_fn
,
'saved!'
)
if
__name__
==
'__main__'
:
if
__name__
==
'__main__'
:
args
=
parse_args
()
args
=
parse_args
()
if
args
.
cfg_file
is
not
None
:
if
args
.
cfg_file
is
not
None
:
...
...
contrib/MechanicalIndustryMeter/download_mini_mechanical_industry_meter.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/MechanicalIndustryMeter/download_unet_mechanical_industry_meter.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -23,7 +24,8 @@ from test_utils import download_file_and_uncompress
...
@@ -23,7 +24,8 @@ from test_utils import download_file_and_uncompress
if
__name__
==
"__main__"
:
if
__name__
==
"__main__"
:
download_file_and_uncompress
(
download_file_and_uncompress
(
url
=
'https://paddleseg.bj.bcebos.com/models/unet_mechanical_industry_meter.tar'
,
url
=
'https://paddleseg.bj.bcebos.com/models/unet_mechanical_industry_meter.tar'
,
savepath
=
LOCAL_PATH
,
savepath
=
LOCAL_PATH
,
extrapath
=
LOCAL_PATH
)
extrapath
=
LOCAL_PATH
)
...
...
contrib/README.md
浏览文件 @
7835c042
...
@@ -3,6 +3,7 @@
...
@@ -3,6 +3,7 @@
提供基于PaddlSeg最新的分割特色模型:
提供基于PaddlSeg最新的分割特色模型:
-
[
人像分割
](
./HumanSeg
)
-
[
人像分割
](
./HumanSeg
)
-
[
遥感分割
](
./RemoteSensing
)
-
[
人体解析
](
./ACE2P
)
-
[
人体解析
](
./ACE2P
)
-
[
车道线分割
](
./LaneNet
)
-
[
车道线分割
](
./LaneNet
)
-
[
工业表盘分割
](
#工业表盘分割
)
-
[
工业表盘分割
](
#工业表盘分割
)
...
@@ -12,6 +13,14 @@
...
@@ -12,6 +13,14 @@
HumanSeg系列全新升级,提供三个适用于不同场景,包含适用于移动端实时分割场景的模型
`HumanSeg-lite`
,提供了包含光流的后处理的优化,使人像分割在视频场景中更加顺畅,更多详情请参考
[
HumanSeg
](
./HumanSeg
)
HumanSeg系列全新升级,提供三个适用于不同场景,包含适用于移动端实时分割场景的模型
`HumanSeg-lite`
,提供了包含光流的后处理的优化,使人像分割在视频场景中更加顺畅,更多详情请参考
[
HumanSeg
](
./HumanSeg
)
## 遥感分割 Remote Sensing Segmentation
PaddleSeg遥感影像分割涵盖图像预处理、数据增强、模型训练、预测流程。
针对遥感数据多通道、分布范围大、分布不均的特点,我们支持多通道训练预测,内置10+多通道预处理和数据增强的策略,可结合实际业务场景进行定制组合,提升模型泛化能力和鲁棒性。
内置U-Net, HRNet两种主流分割网络,可选择不同的损失函数如Dice Loss, BCE Loss等方式强化小目标和不均衡样本场景下的分割精度。更多详情请参考
[
RemoteSensing
](
./RemoteSensing
)
以下是遥感云检测的示例效果:

## 人体解析 Human Parsing
## 人体解析 Human Parsing
...
...
contrib/RemoteSensing/README.md
浏览文件 @
7835c042
#
遥感分割(RemoteSensing)
#
PaddleSeg遥感影像分割
遥感影像分割是图像分割领域中的重要应用场景,广泛应用于土地测绘、环境监测、城市建设等领域。遥感影像分割的目标多种多样,有诸如积雪、农作物、道路、建筑、水源等地物目标,也有例如云层的空中目标。
遥感影像分割是图像分割领域中的重要应用场景,广泛应用于土地测绘、环境监测、城市建设等领域。遥感影像分割的目标多种多样,有诸如积雪、农作物、道路、建筑、水源等地物目标,也有例如云层的空中目标。
PaddleSeg
提供了针对遥感专题的语义分割库RemoteSensing,
涵盖图像预处理、数据增强、模型训练、预测流程,帮助用户利用深度学习技术解决遥感影像分割问题。
PaddleSeg
遥感影像分割
涵盖图像预处理、数据增强、模型训练、预测流程,帮助用户利用深度学习技术解决遥感影像分割问题。
## 特点
## 特点
针对遥感数据多通道、分布范围大、分布不均的特点,我们支持多通道训练预测,内置一系列
多通道预处理和数据增强的策略,可结合实际业务场景进行定制组合,提升模型泛化能力和鲁棒性。
-
针对遥感数据多通道、分布范围大、分布不均的特点,我们支持多通道训练预测,内置10+
多通道预处理和数据增强的策略,可结合实际业务场景进行定制组合,提升模型泛化能力和鲁棒性。
**Note:**
所有命令需要在
`PaddleSeg/contrib/RemoteSensing/`
目录下执行。
-
内置U-Net, HRNet两种主流分割网络,可选择不同的损失函数如Dice Loss, BCE Loss等方式强化小目标和不均衡样本场景下的分割精度。
以下是遥感云检测的示例效果:

## 前置依赖
## 前置依赖
**Note:**
若没有特殊说明,以下所有命令需要在
`PaddleSeg/contrib/RemoteSensing/`
目录下执行。
-
Paddle 1.7.1+
-
Paddle 1.7.1+
由于图像分割模型计算开销大,推荐在GPU版本的PaddlePaddle下使用。
由于图像分割模型计算开销大,推荐在GPU版本的PaddlePaddle下使用。
PaddlePaddle的安装, 请按照
[
官网指引
](
https://paddlepaddle.org.cn/install/quick
)
安装合适自己的版本。
PaddlePaddle的安装, 请按照
[
官网指引
](
https://paddlepaddle.org.cn/install/quick
)
安装合适自己的版本。
...
@@ -18,7 +24,6 @@ PaddlePaddle的安装, 请按照[官网指引](https://paddlepaddle.org.cn/insta
...
@@ -18,7 +24,6 @@ PaddlePaddle的安装, 请按照[官网指引](https://paddlepaddle.org.cn/insta
-
其他依赖安装
-
其他依赖安装
通过以下命令安装python包依赖,请确保至少执行过一次以下命令:
通过以下命令安装python包依赖,请确保至少执行过一次以下命令:
```
```
cd RemoteSensing
pip install -r requirements.txt
pip install -r requirements.txt
```
```
...
@@ -63,9 +68,9 @@ RemoteSensing # 根目录
...
@@ -63,9 +68,9 @@ RemoteSensing # 根目录
```
```
其中,相应的文件名可根据需要自行定义。
其中,相应的文件名可根据需要自行定义。
遥感
领域图像格式多种多样,不同传感器产生的数据格式可能不同。为方便数据加载,本分割库统一
采用numpy存储格式
`npy`
作为原图格式,采用
`png`
无损压缩格式作为标注图片格式。
遥感
影像的格式多种多样,不同传感器产生的数据格式也可能不同。PaddleSeg以numpy.ndarray数据类型进行图像预处理。为统一接口并方便数据加载,我们
采用numpy存储格式
`npy`
作为原图格式,采用
`png`
无损压缩格式作为标注图片格式。
原图的
前两维是图像的尺寸,第3维是
图像的通道数。
原图的
尺寸应为(h, w, channel),其中h, w为图像的高和宽,channel为
图像的通道数。
标注图像为单通道图像,像素值即为对应的类别,像素标注类别需要从0开始递增
,
标注图像为单通道图像,像素值即为对应的类别,像素标注类别需要从0开始递增
。
例如0,1,2,3表示有4种类别,标注类别最多为256类。其中可以指定特定的像素值用于表示该值的像素不参与训练和评估(默认为255)。
例如0,1,2,3表示有4种类别,标注类别最多为256类。其中可以指定特定的像素值用于表示该值的像素不参与训练和评估(默认为255)。
`train_list.txt`
和
`val_list.txt`
文本以空格为分割符分为两列,第一列为图像文件相对于dataset的相对路径,第二列为标注图像文件相对于dataset的相对路径。如下所示:
`train_list.txt`
和
`val_list.txt`
文本以空格为分割符分为两列,第一列为图像文件相对于dataset的相对路径,第二列为标注图像文件相对于dataset的相对路径。如下所示:
...
@@ -93,154 +98,38 @@ labelB
...
@@ -93,154 +98,38 @@ labelB
### 1. 准备数据集
### 1. 准备数据集
为了快速体验,我们准备了一个小型demo数据集,已位于
`RemoteSensing/dataset/demo/`
目录下.
为了快速体验,我们准备了一个小型demo数据集,已位于
`RemoteSensing/dataset/demo/`
目录下.
对于您自己的数据集,您需要按照上述的数据协议进行格式转换,可分别使用numpy和
pil库保存遥感数据和标注图片。其中numpy api
示例如下:
对于您自己的数据集,您需要按照上述的数据协议进行格式转换,可分别使用numpy和
Pillow库保存遥感数据和标注图片。其中numpy API
示例如下:
```
python
```
python
import
numpy
as
np
import
numpy
as
np
#
保存遥感数据
#
将遥感数据保存到以 .npy 为扩展名的文件中
# img类型:numpy.ndarray
# img类型:numpy.ndarray
np
.
save
(
save_path
,
img
)
np
.
save
(
save_path
,
img
)
```
```
### 2. 训练代码开发
### 2. 模型训练
通过如下
`train_demo.py`
代码进行训练。
#### (1) 设置GPU卡号
> 导入RemoteSensing api
```
python
import
transforms.transforms
as
T
from
readers.reader
import
Reader
from
models
import
UNet
```
> 定义训练和验证时的数据处理和增强流程, 在`train_transforms`中加入了`RandomVerticalFlip`,`RandomHorizontalFlip`等数据增强方式。
```
python
train_transforms
=
T
.
Compose
([
T
.
RandomVerticalFlip
(
0.5
),
T
.
RandomHorizontalFlip
(
0.5
),
T
.
ResizeStepScaling
(
0.5
,
2.0
,
0.25
),
T
.
RandomPaddingCrop
(
256
),
T
.
Normalize
(
mean
=
[
0.5
]
*
channel
,
std
=
[
0.5
]
*
channel
),
])
eval_transforms
=
T
.
Compose
([
T
.
Normalize
(
mean
=
[
0.5
]
*
channel
,
std
=
[
0.5
]
*
channel
),
])
```
> 定义数据读取器
```
python
import
os
import
os.path
as
osp
train_list
=
osp
.
join
(
data_dir
,
'train.txt'
)
val_list
=
osp
.
join
(
data_dir
,
'val.txt'
)
label_list
=
osp
.
join
(
data_dir
,
'labels.txt'
)
train_reader
=
Reader
(
data_dir
=
data_dir
,
file_list
=
train_list
,
label_list
=
label_list
,
transforms
=
train_transforms
,
num_workers
=
8
,
buffer_size
=
16
,
shuffle
=
True
,
parallel_method
=
'thread'
)
eval_reader
=
Reader
(
data_dir
=
data_dir
,
file_list
=
val_list
,
label_list
=
label_list
,
transforms
=
eval_transforms
,
num_workers
=
8
,
buffer_size
=
16
,
shuffle
=
False
,
parallel_method
=
'thread'
)
```
> 模型构建
```
python
model
=
UNet
(
num_classes
=
2
,
input_channel
=
channel
,
use_bce_loss
=
True
,
use_dice_loss
=
True
)
```
> 模型训练,并开启边训边评估
```
python
model
.
train
(
num_epochs
=
num_epochs
,
train_reader
=
train_reader
,
train_batch_size
=
train_batch_size
,
eval_reader
=
eval_reader
,
save_interval_epochs
=
5
,
log_interval_steps
=
10
,
save_dir
=
save_dir
,
pretrain_weights
=
None
,
optimizer
=
None
,
learning_rate
=
lr
,
use_vdl
=
True
)
```
### 3. 模型训练
> 设置GPU卡号
```
shell script
```
shell script
export CUDA_VISIBLE_DEVICES=0
export CUDA_VISIBLE_DEVICES=0
```
```
>
在RemoteSensing目录下运行`train_demo.py`即可开始训练。
#### (2) 以U-Net为例,
在RemoteSensing目录下运行`train_demo.py`即可开始训练。
```
shell script
```
shell script
python train_demo.py --data_dir dataset/demo/ --save_dir saved_model/unet/ --channel 3 --num_epochs 20
python train_demo.py --model_type unet --data_dir dataset/demo/ --save_dir saved_model/unet/ --channel 3 --num_epochs 20
```
### 4. 模型预测代码开发
通过如下
`predict_demo.py`
代码进行预测。
> 导入RemoteSensing api
```
python
from
models
import
load_model
```
> 加载训练过程中最好的模型,设置预测结果保存路径。
```
python
import
os
import
os.path
as
osp
model
=
load_model
(
osp
.
join
(
save_dir
,
'best_model'
))
pred_dir
=
osp
.
join
(
save_dir
,
'pred'
)
if
not
osp
.
exists
(
pred_dir
):
os
.
mkdir
(
pred_dir
)
```
> 使用模型对验证集进行测试,并保存预测结果。
```
python
import
numpy
as
np
from
PIL
import
Image
as
Image
val_list
=
osp
.
join
(
data_dir
,
'val.txt'
)
color_map
=
[
0
,
0
,
0
,
255
,
255
,
255
]
with
open
(
val_list
)
as
f
:
lines
=
f
.
readlines
()
for
line
in
lines
:
img_path
=
line
.
split
(
' '
)[
0
]
print
(
'Predicting {}'
.
format
(
img_path
))
img_path_
=
osp
.
join
(
data_dir
,
img_path
)
pred
=
model
.
predict
(
img_path_
)
# 以伪彩色png图片保存预测结果
pred_name
=
osp
.
basename
(
img_path
).
rstrip
(
'npy'
)
+
'png'
pred_path
=
osp
.
join
(
pred_dir
,
pred_name
)
pred_mask
=
Image
.
fromarray
(
pred
.
astype
(
np
.
uint8
),
mode
=
'P'
)
pred_mask
.
putpalette
(
color_map
)
pred_mask
.
save
(
pred_path
)
```
```
###
5
. 模型预测
###
3
. 模型预测
>
设置GPU卡号
#### (1)
设置GPU卡号
```
shell script
```
shell script
export CUDA_VISIBLE_DEVICES=0
export CUDA_VISIBLE_DEVICES=0
```
```
>
在RemoteSensing目录下运行`predict_demo.py`即可开始训练。
#### (2) 以刚训练好的U-Net最优模型为例,
在RemoteSensing目录下运行`predict_demo.py`即可开始训练。
```
shell script
```
shell script
python predict_demo.py --data_dir dataset/demo/ --
load_model_dir saved_model/unet/best_model/
python predict_demo.py --data_dir dataset/demo/ --
file_list val.txt --load_model_dir saved_model/unet/best_model
```
```
## A
pi
说明
## A
PI
说明
您可以使用
`RemoteSensing`
目录下提供的
api
构建自己的分割代码。
您可以使用
`RemoteSensing`
目录下提供的
API
构建自己的分割代码。
-
[
数据处理-transforms
](
docs/transforms.md
)
-
[
数据处理-transforms
](
docs/transforms.md
)
contrib/RemoteSensing/__init__.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/RemoteSensing/docs/imgs/rs.png
0 → 100644
浏览文件 @
7835c042
90.0 KB
contrib/RemoteSensing/models/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
.load_model
import
*
from
.load_model
import
*
from
.unet
import
*
from
.unet
import
*
from
.hrnet
import
*
contrib/RemoteSensing/models/base.py
浏览文件 @
7835c042
#copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
#Licensed under the Apache License, Version 2.0 (the "License");
#
Licensed under the Apache License, Version 2.0 (the "License");
#you may not use this file except in compliance with the License.
#
you may not use this file except in compliance with the License.
#You may obtain a copy of the License at
#
You may obtain a copy of the License at
#
#
# http://www.apache.org/licenses/LICENSE-2.0
# http://www.apache.org/licenses/LICENSE-2.0
#
#
#Unless required by applicable law or agreed to in writing, software
#
Unless required by applicable law or agreed to in writing, software
#distributed under the License is distributed on an "AS IS" BASIS,
#
distributed under the License is distributed on an "AS IS" BASIS,
#WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#See the License for the specific language governing permissions and
#
See the License for the specific language governing permissions and
#limitations under the License.
#
limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
...
@@ -19,15 +20,16 @@ import numpy as np
...
@@ -19,15 +20,16 @@ import numpy as np
import
time
import
time
import
math
import
math
import
yaml
import
yaml
import
tqdm
import
cv2
import
copy
import
copy
import
json
import
utils.logging
as
logging
import
utils.logging
as
logging
from
collections
import
OrderedDict
from
collections
import
OrderedDict
from
os
import
path
as
osp
from
os
import
path
as
osp
from
utils.pretrain_weights
import
get_pretrain_weights
from
utils.utils
import
seconds_to_hms
,
get_environ_info
from
utils.metrics
import
ConfusionMatrix
import
transforms.transforms
as
T
import
transforms.transforms
as
T
import
utils
import
utils
import
__init__
def
dict2str
(
dict_input
):
def
dict2str
(
dict_input
):
...
@@ -41,12 +43,45 @@ def dict2str(dict_input):
...
@@ -41,12 +43,45 @@ def dict2str(dict_input):
return
out
.
strip
(
', '
)
return
out
.
strip
(
', '
)
class
BaseAPI
:
class
BaseModel
(
object
):
def
__init__
(
self
):
def
__init__
(
self
,
# 现有的CV模型都有这个属性,而这个属且也需要在eval时用到
num_classes
=
2
,
self
.
num_classes
=
None
use_bce_loss
=
False
,
use_dice_loss
=
False
,
class_weight
=
None
,
ignore_index
=
255
,
sync_bn
=
True
):
self
.
init_params
=
locals
()
if
num_classes
>
2
and
(
use_bce_loss
or
use_dice_loss
):
raise
ValueError
(
"dice loss and bce loss is only applicable to binary classfication"
)
if
class_weight
is
not
None
:
if
isinstance
(
class_weight
,
list
):
if
len
(
class_weight
)
!=
num_classes
:
raise
ValueError
(
"Length of class_weight should be equal to number of classes"
)
elif
isinstance
(
class_weight
,
str
):
if
class_weight
.
lower
()
!=
'dynamic'
:
raise
ValueError
(
"if class_weight is string, must be dynamic!"
)
else
:
raise
TypeError
(
'Expect class_weight is a list or string but receive {}'
.
format
(
type
(
class_weight
)))
self
.
num_classes
=
num_classes
self
.
use_bce_loss
=
use_bce_loss
self
.
use_dice_loss
=
use_dice_loss
self
.
class_weight
=
class_weight
self
.
ignore_index
=
ignore_index
self
.
sync_bn
=
sync_bn
self
.
labels
=
None
self
.
labels
=
None
if
__init__
.
env_info
[
'place'
]
==
'cpu'
:
self
.
env_info
=
get_environ_info
()
if
self
.
env_info
[
'place'
]
==
'cpu'
:
self
.
places
=
fluid
.
cpu_places
()
self
.
places
=
fluid
.
cpu_places
()
else
:
else
:
self
.
places
=
fluid
.
cuda_places
()
self
.
places
=
fluid
.
cuda_places
()
...
@@ -60,10 +95,6 @@ class BaseAPI:
...
@@ -60,10 +95,6 @@ class BaseAPI:
self
.
test_outputs
=
None
self
.
test_outputs
=
None
self
.
train_data_loader
=
None
self
.
train_data_loader
=
None
self
.
eval_metrics
=
None
self
.
eval_metrics
=
None
# 若模型是从inference model加载进来的,无法调用训练接口进行训练
self
.
trainable
=
True
# 是否使用多卡间同步BatchNorm均值和方差
self
.
sync_bn
=
False
# 当前模型状态
# 当前模型状态
self
.
status
=
'Normal'
self
.
status
=
'Normal'
...
@@ -73,16 +104,20 @@ class BaseAPI:
...
@@ -73,16 +104,20 @@ class BaseAPI:
else
:
else
:
raise
Exception
(
"Please support correct batch_size,
\
raise
Exception
(
"Please support correct batch_size,
\
which can be divided by available cards({}) in {}"
.
which can be divided by available cards({}) in {}"
.
format
(
__init__
.
env_info
[
'num'
],
format
(
self
.
env_info
[
'num'
],
__init__
.
env_info
[
'place'
]))
self
.
env_info
[
'place'
]))
def
build_net
(
self
,
mode
=
'train'
):
"""应根据不同的情况进行构建"""
pass
def
build_program
(
self
):
def
build_program
(
self
):
#
构建训练网络
#
build training network
self
.
train_inputs
,
self
.
train_outputs
=
self
.
build_net
(
mode
=
'train'
)
self
.
train_inputs
,
self
.
train_outputs
=
self
.
build_net
(
mode
=
'train'
)
self
.
train_prog
=
fluid
.
default_main_program
()
self
.
train_prog
=
fluid
.
default_main_program
()
startup_prog
=
fluid
.
default_startup_program
()
startup_prog
=
fluid
.
default_startup_program
()
#
构建预测网络
#
build prediction network
self
.
test_prog
=
fluid
.
Program
()
self
.
test_prog
=
fluid
.
Program
()
with
fluid
.
program_guard
(
self
.
test_prog
,
startup_prog
):
with
fluid
.
program_guard
(
self
.
test_prog
,
startup_prog
):
with
fluid
.
unique_name
.
guard
():
with
fluid
.
unique_name
.
guard
():
...
@@ -90,15 +125,15 @@ class BaseAPI:
...
@@ -90,15 +125,15 @@ class BaseAPI:
mode
=
'test'
)
mode
=
'test'
)
self
.
test_prog
=
self
.
test_prog
.
clone
(
for_test
=
True
)
self
.
test_prog
=
self
.
test_prog
.
clone
(
for_test
=
True
)
def
arrange_transform
s
(
self
,
transforms
,
mode
=
'train'
):
def
arrange_transform
(
self
,
transforms
,
mode
=
'train'
):
# 给transforms添加arrange操作
arrange_transform
=
T
.
ArrangeSegmenter
if
t
ransforms
.
transforms
[
-
1
].
__class__
.
__name__
.
startswith
(
'Arrange'
):
if
t
ype
(
transforms
.
transforms
[
-
1
])
.
__name__
.
startswith
(
'Arrange'
):
transforms
.
transforms
[
-
1
]
=
T
.
ArrangeSegmenter
(
mode
=
mode
)
transforms
.
transforms
[
-
1
]
=
arrange_transform
(
mode
=
mode
)
else
:
else
:
transforms
.
transforms
.
append
(
T
.
ArrangeSegmenter
(
mode
=
mode
))
transforms
.
transforms
.
append
(
arrange_transform
(
mode
=
mode
))
def
build_train_data_loader
(
self
,
reader
,
batch_size
):
def
build_train_data_loader
(
self
,
dataset
,
batch_size
):
#
初始化
data_loader
#
init
data_loader
if
self
.
train_data_loader
is
None
:
if
self
.
train_data_loader
is
None
:
self
.
train_data_loader
=
fluid
.
io
.
DataLoader
.
from_generator
(
self
.
train_data_loader
=
fluid
.
io
.
DataLoader
.
from_generator
(
feed_list
=
list
(
self
.
train_inputs
.
values
()),
feed_list
=
list
(
self
.
train_inputs
.
values
()),
...
@@ -106,72 +141,92 @@ class BaseAPI:
...
@@ -106,72 +141,92 @@ class BaseAPI:
use_double_buffer
=
True
,
use_double_buffer
=
True
,
iterable
=
True
)
iterable
=
True
)
batch_size_each_gpu
=
self
.
_get_single_card_bs
(
batch_size
)
batch_size_each_gpu
=
self
.
_get_single_card_bs
(
batch_size
)
generator
=
reader
.
generator
(
batch_size
=
batch_size_each_gpu
,
drop_last
=
True
)
self
.
train_data_loader
.
set_sample_list_generator
(
self
.
train_data_loader
.
set_sample_list_generator
(
reader
.
generator
(
batch_size
=
batch_size_each_gpu
),
dataset
.
generator
(
batch_size
=
batch_size_each_gpu
),
places
=
self
.
places
)
places
=
self
.
places
)
def
net_initialize
(
self
,
def
net_initialize
(
self
,
startup_prog
=
None
,
startup_prog
=
None
,
pretrain_weights
=
None
,
pretrain_weights
=
None
,
fuse_bn
=
False
,
resume_weights
=
None
):
save_dir
=
'.'
,
sensitivities_file
=
None
,
eval_metric_loss
=
0.05
):
if
hasattr
(
self
,
'backbone'
):
backbone
=
self
.
backbone
else
:
backbone
=
self
.
__class__
.
__name__
pretrain_weights
=
get_pretrain_weights
(
pretrain_weights
,
backbone
,
save_dir
)
if
startup_prog
is
None
:
if
startup_prog
is
None
:
startup_prog
=
fluid
.
default_startup_program
()
startup_prog
=
fluid
.
default_startup_program
()
self
.
exe
.
run
(
startup_prog
)
self
.
exe
.
run
(
startup_prog
)
if
pretrain_weights
is
not
None
:
if
resume_weights
is
not
None
:
logging
.
info
(
"Resume weights from {}"
.
format
(
resume_weights
))
if
not
osp
.
exists
(
resume_weights
):
raise
Exception
(
"Path {} not exists."
.
format
(
resume_weights
))
fluid
.
load
(
self
.
train_prog
,
osp
.
join
(
resume_weights
,
'model'
),
self
.
exe
)
# Check is path ended by path spearator
if
resume_weights
[
-
1
]
==
os
.
sep
:
resume_weights
=
resume_weights
[
0
:
-
1
]
epoch_name
=
osp
.
basename
(
resume_weights
)
# If resume weights is end of digit, restore epoch status
epoch
=
epoch_name
.
split
(
'_'
)[
-
1
]
if
epoch
.
isdigit
():
self
.
begin_epoch
=
int
(
epoch
)
else
:
raise
ValueError
(
"Resume model path is not valid!"
)
logging
.
info
(
"Model checkpoint loaded successfully!"
)
elif
pretrain_weights
is
not
None
:
logging
.
info
(
logging
.
info
(
"Load pretrain weights from {}."
.
format
(
pretrain_weights
))
"Load pretrain weights from {}."
.
format
(
pretrain_weights
))
utils
.
utils
.
load_pretrain_weights
(
self
.
exe
,
self
.
train_prog
,
utils
.
load_pretrained_weights
(
self
.
exe
,
self
.
train_prog
,
pretrain_weights
,
fuse_bn
)
pretrain_weights
)
# 进行裁剪
if
sensitivities_file
is
not
None
:
from
.slim.prune_config
import
get_sensitivities
sensitivities_file
=
get_sensitivities
(
sensitivities_file
,
self
,
save_dir
)
from
.slim.prune
import
get_params_ratios
,
prune_program
prune_params_ratios
=
get_params_ratios
(
sensitivities_file
,
eval_metric_loss
=
eval_metric_loss
)
prune_program
(
self
,
prune_params_ratios
)
self
.
status
=
'Prune'
def
get_model_info
(
self
):
def
get_model_info
(
self
):
# 存储相应的信息到yml文件
info
=
dict
()
info
=
dict
()
info
[
'Model'
]
=
self
.
__class__
.
__name__
info
[
'Model'
]
=
self
.
__class__
.
__name__
info
[
'_Attributes'
]
=
{}
if
'self'
in
self
.
init_params
:
if
'self'
in
self
.
init_params
:
del
self
.
init_params
[
'self'
]
del
self
.
init_params
[
'self'
]
if
'__class__'
in
self
.
init_params
:
if
'__class__'
in
self
.
init_params
:
del
self
.
init_params
[
'__class__'
]
del
self
.
init_params
[
'__class__'
]
info
[
'_init_params'
]
=
self
.
init_params
info
[
'_init_params'
]
=
self
.
init_params
info
[
'_Attributes'
]
=
dict
()
info
[
'_Attributes'
][
'num_classes'
]
=
self
.
num_classes
info
[
'_Attributes'
][
'num_classes'
]
=
self
.
num_classes
info
[
'_Attributes'
][
'labels'
]
=
self
.
labels
info
[
'_Attributes'
][
'labels'
]
=
self
.
labels
try
:
try
:
primary_metric_key
=
list
(
self
.
eval_metrics
.
keys
())[
0
]
info
[
'_Attributes'
][
'eval_metric'
]
=
dict
()
primary_metric_value
=
float
(
self
.
eval_metrics
[
primary_metric_key
])
for
k
,
v
in
self
.
eval_metrics
.
items
():
info
[
'_Attributes'
][
'eval_metrics'
]
=
{
if
isinstance
(
v
,
np
.
ndarray
):
primary_metric_key
:
primary_metric_value
if
v
.
size
>
1
:
}
v
=
[
float
(
i
)
for
i
in
v
]
else
:
v
=
float
(
v
)
info
[
'_Attributes'
][
'eval_metric'
][
k
]
=
v
except
:
except
:
pass
pass
if
hasattr
(
self
,
'test_transforms'
):
if
hasattr
(
self
,
'test_transforms'
):
if
self
.
test_transforms
is
not
None
:
if
self
.
test_transforms
is
not
None
:
info
[
'
T
ransforms'
]
=
list
()
info
[
'
test_t
ransforms'
]
=
list
()
for
op
in
self
.
test_transforms
.
transforms
:
for
op
in
self
.
test_transforms
.
transforms
:
name
=
op
.
__class__
.
__name__
name
=
op
.
__class__
.
__name__
attr
=
op
.
__dict__
attr
=
op
.
__dict__
info
[
'Transforms'
].
append
({
name
:
attr
})
info
[
'test_transforms'
].
append
({
name
:
attr
})
if
hasattr
(
self
,
'train_transforms'
):
if
self
.
train_transforms
is
not
None
:
info
[
'train_transforms'
]
=
list
()
for
op
in
self
.
train_transforms
.
transforms
:
name
=
op
.
__class__
.
__name__
attr
=
op
.
__dict__
info
[
'train_transforms'
].
append
({
name
:
attr
})
if
hasattr
(
self
,
'train_init'
):
if
'self'
in
self
.
train_init
:
del
self
.
train_init
[
'self'
]
if
'train_reader'
in
self
.
train_init
:
del
self
.
train_init
[
'train_reader'
]
if
'eval_reader'
in
self
.
train_init
:
del
self
.
train_init
[
'eval_reader'
]
if
'optimizer'
in
self
.
train_init
:
del
self
.
train_init
[
'optimizer'
]
info
[
'train_init'
]
=
self
.
train_init
return
info
return
info
def
save_model
(
self
,
save_dir
):
def
save_model
(
self
,
save_dir
):
...
@@ -179,76 +234,139 @@ class BaseAPI:
...
@@ -179,76 +234,139 @@ class BaseAPI:
if
osp
.
exists
(
save_dir
):
if
osp
.
exists
(
save_dir
):
os
.
remove
(
save_dir
)
os
.
remove
(
save_dir
)
os
.
makedirs
(
save_dir
)
os
.
makedirs
(
save_dir
)
fluid
.
save
(
self
.
train_prog
,
osp
.
join
(
save_dir
,
'model'
))
model_info
=
self
.
get_model_info
()
model_info
=
self
.
get_model_info
()
if
self
.
status
==
'Normal'
:
fluid
.
save
(
self
.
train_prog
,
osp
.
join
(
save_dir
,
'model'
))
model_info
[
'status'
]
=
self
.
status
model_info
[
'status'
]
=
self
.
status
with
open
(
with
open
(
osp
.
join
(
save_dir
,
'model.yml'
),
encoding
=
'utf-8'
,
osp
.
join
(
save_dir
,
'model.yml'
),
encoding
=
'utf-8'
,
mode
=
'w'
)
as
f
:
mode
=
'w'
)
as
f
:
yaml
.
dump
(
model_info
,
f
)
yaml
.
dump
(
model_info
,
f
)
# 评估结果保存
if
hasattr
(
self
,
'eval_details'
):
# The flag of model for saving successfully
with
open
(
osp
.
join
(
save_dir
,
'eval_details.json'
),
'w'
)
as
f
:
open
(
osp
.
join
(
save_dir
,
'.success'
),
'w'
).
close
()
json
.
dump
(
self
.
eval_details
,
f
)
logging
.
info
(
"Model saved in {}."
.
format
(
save_dir
))
if
self
.
status
==
'Prune'
:
def
export_inference_model
(
self
,
save_dir
):
# 保存裁剪的shape
test_input_names
=
[
var
.
name
for
var
in
list
(
self
.
test_inputs
.
values
())]
shapes
=
{}
test_outputs
=
list
(
self
.
test_outputs
.
values
())
for
block
in
self
.
train_prog
.
blocks
:
fluid
.
io
.
save_inference_model
(
for
param
in
block
.
all_parameters
():
dirname
=
save_dir
,
pd_var
=
fluid
.
global_scope
().
find_var
(
param
.
name
)
executor
=
self
.
exe
,
pd_param
=
pd_var
.
get_tensor
()
params_filename
=
'__params__'
,
shapes
[
param
.
name
]
=
np
.
array
(
pd_param
).
shape
feeded_var_names
=
test_input_names
,
target_vars
=
test_outputs
,
main_program
=
self
.
test_prog
)
model_info
=
self
.
get_model_info
()
model_info
[
'status'
]
=
'Infer'
# Save input and output descrition of model
model_info
[
'_ModelInputsOutputs'
]
=
dict
()
model_info
[
'_ModelInputsOutputs'
][
'test_inputs'
]
=
[
[
k
,
v
.
name
]
for
k
,
v
in
self
.
test_inputs
.
items
()
]
model_info
[
'_ModelInputsOutputs'
][
'test_outputs'
]
=
[
[
k
,
v
.
name
]
for
k
,
v
in
self
.
test_outputs
.
items
()
]
with
open
(
with
open
(
osp
.
join
(
save_dir
,
'prune
.yml'
),
encoding
=
'utf-8'
,
osp
.
join
(
save_dir
,
'model
.yml'
),
encoding
=
'utf-8'
,
mode
=
'w'
)
as
f
:
mode
=
'w'
)
as
f
:
yaml
.
dump
(
shapes
,
f
)
yaml
.
dump
(
model_info
,
f
)
#
模型保存成功的标志
#
The flag of model for saving successfully
open
(
osp
.
join
(
save_dir
,
'.success'
),
'w'
).
close
()
open
(
osp
.
join
(
save_dir
,
'.success'
),
'w'
).
close
()
logging
.
info
(
"Model saved in {}."
.
format
(
save_dir
))
logging
.
info
(
"Model
for inference deploy
saved in {}."
.
format
(
save_dir
))
def
train_loop
(
self
,
def
default_optimizer
(
self
,
learning_rate
,
num_epochs
,
num_steps_each_epoch
,
lr_decay_power
=
0.9
,
regularization_coeff
=
4e-5
):
decay_step
=
num_epochs
*
num_steps_each_epoch
lr_decay
=
fluid
.
layers
.
polynomial_decay
(
learning_rate
,
decay_step
,
end_learning_rate
=
0
,
power
=
lr_decay_power
)
optimizer
=
fluid
.
optimizer
.
Momentum
(
lr_decay
,
momentum
=
0.9
,
regularization
=
fluid
.
regularizer
.
L2Decay
(
regularization_coeff
=
regularization_coeff
))
return
optimizer
def
train
(
self
,
num_epochs
,
num_epochs
,
train_reader
,
train_reader
,
train_batch_size
,
train_batch_size
=
2
,
eval_reader
=
None
,
eval_reader
=
None
,
eval_best_metric
=
None
,
eval_best_metric
=
None
,
save_interval_epochs
=
1
,
save_interval_epochs
=
1
,
log_interval_steps
=
10
,
log_interval_steps
=
2
,
save_dir
=
'output'
,
save_dir
=
'output'
,
pretrain_weights
=
None
,
resume_weights
=
None
,
optimizer
=
None
,
learning_rate
=
0.01
,
lr_decay_power
=
0.9
,
regularization_coeff
=
4e-5
,
use_vdl
=
False
):
use_vdl
=
False
):
self
.
labels
=
train_reader
.
labels
self
.
train_transforms
=
train_reader
.
transforms
self
.
train_init
=
locals
()
self
.
begin_epoch
=
0
if
optimizer
is
None
:
num_steps_each_epoch
=
train_reader
.
num_samples
//
train_batch_size
optimizer
=
self
.
default_optimizer
(
learning_rate
=
learning_rate
,
num_epochs
=
num_epochs
,
num_steps_each_epoch
=
num_steps_each_epoch
,
lr_decay_power
=
lr_decay_power
,
regularization_coeff
=
regularization_coeff
)
self
.
optimizer
=
optimizer
self
.
build_program
()
self
.
net_initialize
(
startup_prog
=
fluid
.
default_startup_program
(),
pretrain_weights
=
pretrain_weights
,
resume_weights
=
resume_weights
)
if
self
.
begin_epoch
>=
num_epochs
:
raise
ValueError
(
(
"begin epoch[{}] is larger than num_epochs[{}]"
).
format
(
self
.
begin_epoch
,
num_epochs
))
if
not
osp
.
isdir
(
save_dir
):
if
not
osp
.
isdir
(
save_dir
):
if
osp
.
exists
(
save_dir
):
if
osp
.
exists
(
save_dir
):
os
.
remove
(
save_dir
)
os
.
remove
(
save_dir
)
os
.
makedirs
(
save_dir
)
os
.
makedirs
(
save_dir
)
if
use_vdl
:
from
visualdl
import
LogWriter
# add arrange op tor transforms
vdl_logdir
=
osp
.
join
(
save_dir
,
'vdl_log'
)
self
.
arrange_transform
(
transforms
=
train_reader
.
transforms
,
mode
=
'train'
)
# 给transform添加arrange操作
self
.
arrange_transforms
(
transforms
=
train_reader
.
transforms
,
mode
=
'train'
)
# 构建train_data_loader
self
.
build_train_data_loader
(
self
.
build_train_data_loader
(
reader
=
train_reader
,
batch_size
=
train_batch_size
)
dataset
=
train_reader
,
batch_size
=
train_batch_size
)
if
eval_reader
is
not
None
:
if
eval_reader
is
not
None
:
self
.
eval_transforms
=
eval_reader
.
transforms
self
.
eval_transforms
=
eval_reader
.
transforms
self
.
test_transforms
=
copy
.
deepcopy
(
eval_reader
.
transforms
)
self
.
test_transforms
=
copy
.
deepcopy
(
eval_reader
.
transforms
)
# 获取实时变化的learning rate
lr
=
self
.
optimizer
.
_learning_rate
lr
=
self
.
optimizer
.
_learning_rate
lr
.
persistable
=
True
if
isinstance
(
lr
,
fluid
.
framework
.
Variable
):
if
isinstance
(
lr
,
fluid
.
framework
.
Variable
):
self
.
train_outputs
[
'lr'
]
=
lr
self
.
train_outputs
[
'lr'
]
=
lr
#
在多卡上跑
训练
#
多卡
训练
if
self
.
parallel_train_prog
is
None
:
if
self
.
parallel_train_prog
is
None
:
build_strategy
=
fluid
.
compiler
.
BuildStrategy
()
build_strategy
=
fluid
.
compiler
.
BuildStrategy
()
build_strategy
.
fuse_all_optimizer_ops
=
False
if
self
.
env_info
[
'place'
]
!=
'cpu'
and
len
(
self
.
places
)
>
1
:
if
__init__
.
env_info
[
'place'
]
!=
'cpu'
and
len
(
self
.
places
)
>
1
:
build_strategy
.
sync_batch_norm
=
self
.
sync_bn
build_strategy
.
sync_batch_norm
=
self
.
sync_bn
exec_strategy
=
fluid
.
ExecutionStrategy
()
exec_strategy
=
fluid
.
ExecutionStrategy
()
exec_strategy
.
num_iteration_per_drop_scope
=
1
exec_strategy
.
num_iteration_per_drop_scope
=
1
self
.
parallel_train_prog
=
fluid
.
CompiledProgram
(
self
.
parallel_train_prog
=
fluid
.
CompiledProgram
(
self
.
train_prog
).
with_data_parallel
(
self
.
train_prog
).
with_data_parallel
(
loss_name
=
self
.
train_outputs
[
'loss'
].
name
,
loss_name
=
self
.
train_outputs
[
'loss'
].
name
,
...
@@ -259,16 +377,27 @@ class BaseAPI:
...
@@ -259,16 +377,27 @@ class BaseAPI:
train_reader
.
num_samples
/
train_batch_size
)
train_reader
.
num_samples
/
train_batch_size
)
num_steps
=
0
num_steps
=
0
time_stat
=
list
()
time_stat
=
list
()
time_train_one_epoch
=
None
time_eval_one_epoch
=
None
total_num_steps_eval
=
0
# eval times
total_eval_times
=
math
.
ceil
(
num_epochs
/
save_interval_epochs
)
eval_batch_size
=
train_batch_size
if
eval_reader
is
not
None
:
total_num_steps_eval
=
math
.
ceil
(
eval_reader
.
num_samples
/
eval_batch_size
)
if
use_vdl
:
if
use_vdl
:
# VisualDL component
from
visualdl
import
LogWriter
vdl_logdir
=
osp
.
join
(
save_dir
,
'vdl_log'
)
log_writer
=
LogWriter
(
vdl_logdir
)
log_writer
=
LogWriter
(
vdl_logdir
)
best_metric
=
-
1.0
best_accuracy
=
-
1.0
best_model_epoch
=
1
best_model_epoch
=
1
for
i
in
range
(
num_epochs
):
for
i
in
range
(
self
.
begin_epoch
,
num_epochs
):
records
=
list
()
records
=
list
()
step_start_time
=
time
.
time
()
step_start_time
=
time
.
time
()
epoch_start_time
=
time
.
time
()
for
step
,
data
in
enumerate
(
self
.
train_data_loader
()):
for
step
,
data
in
enumerate
(
self
.
train_data_loader
()):
outputs
=
self
.
exe
.
run
(
outputs
=
self
.
exe
.
run
(
self
.
parallel_train_prog
,
self
.
parallel_train_prog
,
...
@@ -277,22 +406,15 @@ class BaseAPI:
...
@@ -277,22 +406,15 @@ class BaseAPI:
outputs_avg
=
np
.
mean
(
np
.
array
(
outputs
),
axis
=
1
)
outputs_avg
=
np
.
mean
(
np
.
array
(
outputs
),
axis
=
1
)
records
.
append
(
outputs_avg
)
records
.
append
(
outputs_avg
)
#
训练完成剩余时间预估
#
time estimated to complete the training
curren
t
_time
=
time
.
time
()
curren
d
_time
=
time
.
time
()
step_cost_time
=
curren
t
_time
-
step_start_time
step_cost_time
=
curren
d
_time
-
step_start_time
step_start_time
=
curren
t
_time
step_start_time
=
curren
d
_time
if
len
(
time_stat
)
<
20
:
if
len
(
time_stat
)
<
20
:
time_stat
.
append
(
step_cost_time
)
time_stat
.
append
(
step_cost_time
)
else
:
else
:
time_stat
[
num_steps
%
20
]
=
step_cost_time
time_stat
[
num_steps
%
20
]
=
step_cost_time
eta
=
((
num_epochs
-
i
)
*
total_num_steps
-
step
-
1
)
*
np
.
mean
(
time_stat
)
eta_h
=
math
.
floor
(
eta
/
3600
)
eta_m
=
math
.
floor
((
eta
-
eta_h
*
3600
)
/
60
)
eta_s
=
int
(
eta
-
eta_h
*
3600
-
eta_m
*
60
)
eta_str
=
"{}:{}:{}"
.
format
(
eta_h
,
eta_m
,
eta_s
)
# 每间隔log_interval_steps,输出loss信息
num_steps
+=
1
num_steps
+=
1
if
num_steps
%
log_interval_steps
==
0
:
if
num_steps
%
log_interval_steps
==
0
:
step_metrics
=
OrderedDict
(
step_metrics
=
OrderedDict
(
...
@@ -301,38 +423,52 @@ class BaseAPI:
...
@@ -301,38 +423,52 @@ class BaseAPI:
if
use_vdl
:
if
use_vdl
:
for
k
,
v
in
step_metrics
.
items
():
for
k
,
v
in
step_metrics
.
items
():
log_writer
.
add_scalar
(
log_writer
.
add_scalar
(
tag
=
"Training: {}"
.
format
(
k
),
step
=
num_steps
,
value
=
v
,
tag
=
'train/{}'
.
format
(
k
),
step
=
num_steps
)
value
=
v
)
# 计算剩余时间
avg_step_time
=
np
.
mean
(
time_stat
)
if
time_train_one_epoch
is
not
None
:
eta
=
(
num_epochs
-
i
-
1
)
*
time_train_one_epoch
+
(
total_num_steps
-
step
-
1
)
*
avg_step_time
else
:
eta
=
((
num_epochs
-
i
)
*
total_num_steps
-
step
-
1
)
*
avg_step_time
if
time_eval_one_epoch
is
not
None
:
eval_eta
=
(
total_eval_times
-
i
//
save_interval_epochs
)
*
time_eval_one_epoch
else
:
eval_eta
=
(
total_eval_times
-
i
//
save_interval_epochs
)
*
total_num_steps_eval
*
avg_step_time
eta_str
=
seconds_to_hms
(
eta
+
eval_eta
)
logging
.
info
(
logging
.
info
(
"[TRAIN] Epoch={}/{}, Step={}/{}, {}, eta={}"
.
format
(
"[TRAIN] Epoch={}/{}, Step={}/{}, {}, time_each_step={}s, eta={}"
i
+
1
,
num_epochs
,
step
+
1
,
total_num_steps
,
.
format
(
i
+
1
,
num_epochs
,
step
+
1
,
total_num_steps
,
dict2str
(
step_metrics
),
eta_str
))
dict2str
(
step_metrics
),
round
(
avg_step_time
,
2
),
eta_str
))
train_metrics
=
OrderedDict
(
train_metrics
=
OrderedDict
(
zip
(
list
(
self
.
train_outputs
.
keys
()),
np
.
mean
(
records
,
axis
=
0
)))
zip
(
list
(
self
.
train_outputs
.
keys
()),
np
.
mean
(
records
,
axis
=
0
)))
logging
.
info
(
'[TRAIN] Epoch {} finished, {} .'
.
format
(
logging
.
info
(
'[TRAIN] Epoch {} finished, {} .'
.
format
(
i
+
1
,
dict2str
(
train_metrics
)))
i
+
1
,
dict2str
(
train_metrics
)))
time_train_one_epoch
=
time
.
time
()
-
epoch_start_time
# 每间隔save_interval_epochs, 在验证集上评估和对模型进行保存
eval_epoch_start_time
=
time
.
time
()
if
(
i
+
1
)
%
save_interval_epochs
==
0
or
i
==
num_epochs
-
1
:
if
(
i
+
1
)
%
save_interval_epochs
==
0
or
i
==
num_epochs
-
1
:
current_save_dir
=
osp
.
join
(
save_dir
,
"epoch_{}"
.
format
(
i
+
1
))
current_save_dir
=
osp
.
join
(
save_dir
,
"epoch_{}"
.
format
(
i
+
1
))
if
not
osp
.
isdir
(
current_save_dir
):
if
not
osp
.
isdir
(
current_save_dir
):
os
.
makedirs
(
current_save_dir
)
os
.
makedirs
(
current_save_dir
)
if
eval_reader
is
not
None
:
if
eval_reader
is
not
None
:
# 检测目前仅支持单卡评估,训练数据batch大小与显卡数量之商为验证数据batch大小。
self
.
eval_metrics
=
self
.
evaluate
(
eval_batch_size
=
train_batch_size
self
.
eval_metrics
,
self
.
eval_details
=
self
.
evaluate
(
eval_reader
=
eval_reader
,
eval_reader
=
eval_reader
,
batch_size
=
eval_batch_size
,
batch_size
=
eval_batch_size
,
verbose
=
True
,
epoch_id
=
i
+
1
)
epoch_id
=
i
+
1
,
return_details
=
True
)
logging
.
info
(
'[EVAL] Finished, Epoch={}, {} .'
.
format
(
i
+
1
,
dict2str
(
self
.
eval_metrics
)))
# 保存最优模型
# 保存最优模型
current_metric
=
self
.
eval_metrics
[
eval_best_metric
]
current_metric
=
self
.
eval_metrics
[
eval_best_metric
]
if
current_metric
>
best_
accuracy
:
if
current_metric
>
best_
metric
:
best_
accuracy
=
current_metric
best_
metric
=
current_metric
best_model_epoch
=
i
+
1
best_model_epoch
=
i
+
1
best_model_dir
=
osp
.
join
(
save_dir
,
"best_model"
)
best_model_dir
=
osp
.
join
(
save_dir
,
"best_model"
)
self
.
save_model
(
save_dir
=
best_model_dir
)
self
.
save_model
(
save_dir
=
best_model_dir
)
...
@@ -344,10 +480,131 @@ class BaseAPI:
...
@@ -344,10 +480,131 @@ class BaseAPI:
if
v
.
size
>
1
:
if
v
.
size
>
1
:
continue
continue
log_writer
.
add_scalar
(
log_writer
.
add_scalar
(
tag
=
"Evaluation: {}"
.
format
(
k
)
,
step
=
num_steps
,
step
=
i
+
1
,
tag
=
'evaluate/{}'
.
format
(
k
)
,
value
=
v
)
value
=
v
)
self
.
save_model
(
save_dir
=
current_save_dir
)
self
.
save_model
(
save_dir
=
current_save_dir
)
time_eval_one_epoch
=
time
.
time
()
-
eval_epoch_start_time
if
eval_reader
is
not
None
:
logging
.
info
(
logging
.
info
(
'Current evaluated best model in eval_reader is epoch_{}, {}={}'
'Current evaluated best model in validation dataset is epoch_{}, {}={}'
.
format
(
best_model_epoch
,
eval_best_metric
,
best_accuracy
))
.
format
(
best_model_epoch
,
eval_best_metric
,
best_metric
))
def
evaluate
(
self
,
eval_reader
,
batch_size
=
1
,
epoch_id
=
None
):
"""评估。
Args:
eval_reader (reader): 评估数据读取器。
batch_size (int): 评估时的batch大小。默认1。
epoch_id (int): 当前评估模型所在的训练轮数。
return_details (bool): 是否返回详细信息。默认False。
Returns:
dict: 当return_details为False时,返回dict。包含关键字:'miou'、'category_iou'、'macc'、
'category_acc'和'kappa',分别表示平均iou、各类别iou、平均准确率、各类别准确率和kappa系数。
tuple (metrics, eval_details):当return_details为True时,增加返回dict (eval_details),
包含关键字:'confusion_matrix',表示评估的混淆矩阵。
"""
self
.
arrange_transform
(
transforms
=
eval_reader
.
transforms
,
mode
=
'train'
)
total_steps
=
math
.
ceil
(
eval_reader
.
num_samples
*
1.0
/
batch_size
)
conf_mat
=
ConfusionMatrix
(
self
.
num_classes
,
streaming
=
True
)
data_generator
=
eval_reader
.
generator
(
batch_size
=
batch_size
,
drop_last
=
False
)
if
not
hasattr
(
self
,
'parallel_test_prog'
):
self
.
parallel_test_prog
=
fluid
.
CompiledProgram
(
self
.
test_prog
).
with_data_parallel
(
share_vars_from
=
self
.
parallel_train_prog
)
logging
.
info
(
"Start to evaluating(total_samples={}, total_steps={})..."
.
format
(
eval_reader
.
num_samples
,
total_steps
))
for
step
,
data
in
tqdm
.
tqdm
(
enumerate
(
data_generator
()),
total
=
total_steps
):
images
=
np
.
array
([
d
[
0
]
for
d
in
data
])
images
=
images
.
astype
(
np
.
float32
)
labels
=
np
.
array
([
d
[
1
]
for
d
in
data
])
num_samples
=
images
.
shape
[
0
]
if
num_samples
<
batch_size
:
num_pad_samples
=
batch_size
-
num_samples
pad_images
=
np
.
tile
(
images
[
0
:
1
],
(
num_pad_samples
,
1
,
1
,
1
))
images
=
np
.
concatenate
([
images
,
pad_images
])
feed_data
=
{
'image'
:
images
}
outputs
=
self
.
exe
.
run
(
self
.
parallel_test_prog
,
feed
=
feed_data
,
fetch_list
=
list
(
self
.
test_outputs
.
values
()),
return_numpy
=
True
)
pred
=
outputs
[
0
]
if
num_samples
<
batch_size
:
pred
=
pred
[
0
:
num_samples
]
mask
=
labels
!=
self
.
ignore_index
conf_mat
.
calculate
(
pred
=
pred
,
label
=
labels
,
ignore
=
mask
)
_
,
iou
=
conf_mat
.
mean_iou
()
logging
.
debug
(
"[EVAL] Epoch={}, Step={}/{}, iou={}"
.
format
(
epoch_id
,
step
+
1
,
total_steps
,
iou
))
category_iou
,
miou
=
conf_mat
.
mean_iou
()
category_acc
,
macc
=
conf_mat
.
accuracy
()
precision
,
recall
=
conf_mat
.
precision_recall
()
metrics
=
OrderedDict
(
zip
([
'miou'
,
'category_iou'
,
'macc'
,
'category_acc'
,
'kappa'
,
'precision'
,
'recall'
],
[
miou
,
category_iou
,
macc
,
category_acc
,
conf_mat
.
kappa
(),
precision
,
recall
]))
logging
.
info
(
'[EVAL] Finished, Epoch={}, {} .'
.
format
(
epoch_id
,
dict2str
(
metrics
)))
return
metrics
def
predict
(
self
,
im_file
,
transforms
=
None
):
"""预测。
Args:
img_file(str|np.ndarray): 预测图像。
transforms(transforms.transforms): 数据预处理操作。
Returns:
dict: 包含关键字'label_map'和'score_map', 'label_map'存储预测结果灰度图,
像素值表示对应的类别,'score_map'存储各类别的概率,shape=(h, w, num_classes)
"""
if
isinstance
(
im_file
,
str
):
if
not
osp
.
exists
(
im_file
):
raise
ValueError
(
'The Image file does not exist: {}'
.
format
(
im_file
))
if
transforms
is
None
and
not
hasattr
(
self
,
'test_transforms'
):
raise
Exception
(
"transforms need to be defined, now is None."
)
if
transforms
is
not
None
:
self
.
arrange_transform
(
transforms
=
transforms
,
mode
=
'test'
)
im
,
im_info
=
transforms
(
im_file
)
else
:
self
.
arrange_transform
(
transforms
=
self
.
test_transforms
,
mode
=
'test'
)
im
,
im_info
=
self
.
test_transforms
(
im_file
)
im
=
im
.
astype
(
np
.
float32
)
im
=
np
.
expand_dims
(
im
,
axis
=
0
)
result
=
self
.
exe
.
run
(
self
.
test_prog
,
feed
=
{
'image'
:
im
},
fetch_list
=
list
(
self
.
test_outputs
.
values
()))
pred
=
result
[
0
]
logit
=
result
[
1
]
logit
=
np
.
squeeze
(
logit
)
logit
=
np
.
transpose
(
logit
,
(
1
,
2
,
0
))
pred
=
np
.
squeeze
(
pred
).
astype
(
'uint8'
)
keys
=
list
(
im_info
.
keys
())
for
k
in
keys
[::
-
1
]:
if
k
==
'shape_before_resize'
:
h
,
w
=
im_info
[
k
][
0
],
im_info
[
k
][
1
]
pred
=
cv2
.
resize
(
pred
,
(
w
,
h
),
cv2
.
INTER_NEAREST
)
logit
=
cv2
.
resize
(
logit
,
(
w
,
h
),
cv2
.
INTER_LINEAR
)
elif
k
==
'shape_before_padding'
:
h
,
w
=
im_info
[
k
][
0
],
im_info
[
k
][
1
]
pred
=
pred
[
0
:
h
,
0
:
w
]
logit
=
logit
[
0
:
h
,
0
:
w
,
:]
return
{
'label_map'
:
pred
,
'score_map'
:
logit
}
contrib/RemoteSensing/models/hrnet.py
0 → 100644
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License"
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
absolute_import
import
paddle.fluid
as
fluid
import
os
from
os
import
path
as
osp
import
numpy
as
np
from
collections
import
OrderedDict
import
copy
import
math
import
time
import
tqdm
import
cv2
import
yaml
import
utils
import
utils.logging
as
logging
from
utils.utils
import
seconds_to_hms
,
get_environ_info
from
utils.metrics
import
ConfusionMatrix
import
nets
import
transforms.transforms
as
T
from
.base
import
BaseModel
def
dict2str
(
dict_input
):
out
=
''
for
k
,
v
in
dict_input
.
items
():
try
:
v
=
round
(
float
(
v
),
6
)
except
:
pass
out
=
out
+
'{}={}, '
.
format
(
k
,
v
)
return
out
.
strip
(
', '
)
class
HRNet
(
BaseModel
):
def
__init__
(
self
,
num_classes
=
2
,
input_channel
=
3
,
stage1_num_modules
=
1
,
stage1_num_blocks
=
[
4
],
stage1_num_channels
=
[
64
],
stage2_num_modules
=
1
,
stage2_num_blocks
=
[
4
,
4
],
stage2_num_channels
=
[
18
,
36
],
stage3_num_modules
=
4
,
stage3_num_blocks
=
[
4
,
4
,
4
],
stage3_num_channels
=
[
18
,
36
,
72
],
stage4_num_modules
=
3
,
stage4_num_blocks
=
[
4
,
4
,
4
,
4
],
stage4_num_channels
=
[
18
,
36
,
72
,
144
],
use_bce_loss
=
False
,
use_dice_loss
=
False
,
class_weight
=
None
,
ignore_index
=
255
,
sync_bn
=
True
):
super
().
__init__
(
num_classes
=
num_classes
,
use_bce_loss
=
use_bce_loss
,
use_dice_loss
=
use_dice_loss
,
class_weight
=
class_weight
,
ignore_index
=
ignore_index
,
sync_bn
=
sync_bn
)
self
.
init_params
=
locals
()
self
.
input_channel
=
input_channel
self
.
stage1_num_modules
=
stage1_num_modules
self
.
stage1_num_blocks
=
stage1_num_blocks
self
.
stage1_num_channels
=
stage1_num_channels
self
.
stage2_num_modules
=
stage2_num_modules
self
.
stage2_num_blocks
=
stage2_num_blocks
self
.
stage2_num_channels
=
stage2_num_channels
self
.
stage3_num_modules
=
stage3_num_modules
self
.
stage3_num_blocks
=
stage3_num_blocks
self
.
stage3_num_channels
=
stage3_num_channels
self
.
stage4_num_modules
=
stage4_num_modules
self
.
stage4_num_blocks
=
stage4_num_blocks
self
.
stage4_num_channels
=
stage4_num_channels
def
build_net
(
self
,
mode
=
'train'
):
"""应根据不同的情况进行构建"""
model
=
nets
.
HRNet
(
self
.
num_classes
,
self
.
input_channel
,
mode
=
mode
,
stage1_num_modules
=
self
.
stage1_num_modules
,
stage1_num_blocks
=
self
.
stage1_num_blocks
,
stage1_num_channels
=
self
.
stage1_num_channels
,
stage2_num_modules
=
self
.
stage2_num_modules
,
stage2_num_blocks
=
self
.
stage2_num_blocks
,
stage2_num_channels
=
self
.
stage2_num_channels
,
stage3_num_modules
=
self
.
stage3_num_modules
,
stage3_num_blocks
=
self
.
stage3_num_blocks
,
stage3_num_channels
=
self
.
stage3_num_channels
,
stage4_num_modules
=
self
.
stage4_num_modules
,
stage4_num_blocks
=
self
.
stage4_num_blocks
,
stage4_num_channels
=
self
.
stage4_num_channels
,
use_bce_loss
=
self
.
use_bce_loss
,
use_dice_loss
=
self
.
use_dice_loss
,
class_weight
=
self
.
class_weight
,
ignore_index
=
self
.
ignore_index
)
inputs
=
model
.
generate_inputs
()
model_out
=
model
.
build_net
(
inputs
)
outputs
=
OrderedDict
()
if
mode
==
'train'
:
self
.
optimizer
.
minimize
(
model_out
)
outputs
[
'loss'
]
=
model_out
else
:
outputs
[
'pred'
]
=
model_out
[
0
]
outputs
[
'logit'
]
=
model_out
[
1
]
return
inputs
,
outputs
def
train
(
self
,
num_epochs
,
train_reader
,
train_batch_size
=
2
,
eval_reader
=
None
,
eval_best_metric
=
'kappa'
,
save_interval_epochs
=
1
,
log_interval_steps
=
2
,
save_dir
=
'output'
,
pretrain_weights
=
None
,
resume_weights
=
None
,
optimizer
=
None
,
learning_rate
=
0.01
,
lr_decay_power
=
0.9
,
regularization_coeff
=
5e-4
,
use_vdl
=
False
):
super
().
train
(
num_epochs
=
num_epochs
,
train_reader
=
train_reader
,
train_batch_size
=
train_batch_size
,
eval_reader
=
eval_reader
,
eval_best_metric
=
eval_best_metric
,
save_interval_epochs
=
save_interval_epochs
,
log_interval_steps
=
log_interval_steps
,
save_dir
=
save_dir
,
pretrain_weights
=
pretrain_weights
,
resume_weights
=
resume_weights
,
optimizer
=
optimizer
,
learning_rate
=
learning_rate
,
lr_decay_power
=
lr_decay_power
,
regularization_coeff
=
regularization_coeff
,
use_vdl
=
use_vdl
)
contrib/RemoteSensing/models/load_model.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -25,7 +26,7 @@ import models
...
@@ -25,7 +26,7 @@ import models
def
load_model
(
model_dir
):
def
load_model
(
model_dir
):
if
not
osp
.
exists
(
osp
.
join
(
model_dir
,
"model.yml"
)):
if
not
osp
.
exists
(
osp
.
join
(
model_dir
,
"model.yml"
)):
raise
Exception
(
"There's no
t
model.yml in {}"
.
format
(
model_dir
))
raise
Exception
(
"There's no model.yml in {}"
.
format
(
model_dir
))
with
open
(
osp
.
join
(
model_dir
,
"model.yml"
))
as
f
:
with
open
(
osp
.
join
(
model_dir
,
"model.yml"
))
as
f
:
info
=
yaml
.
load
(
f
.
read
(),
Loader
=
yaml
.
Loader
)
info
=
yaml
.
load
(
f
.
read
(),
Loader
=
yaml
.
Loader
)
status
=
info
[
'status'
]
status
=
info
[
'status'
]
...
@@ -35,8 +36,7 @@ def load_model(model_dir):
...
@@ -35,8 +36,7 @@ def load_model(model_dir):
info
[
'Model'
]))
info
[
'Model'
]))
model
=
getattr
(
models
,
info
[
'Model'
])(
**
info
[
'_init_params'
])
model
=
getattr
(
models
,
info
[
'Model'
])(
**
info
[
'_init_params'
])
if
status
==
"Normal"
or
\
if
status
==
"Normal"
:
status
==
"Prune"
:
startup_prog
=
fluid
.
Program
()
startup_prog
=
fluid
.
Program
()
model
.
test_prog
=
fluid
.
Program
()
model
.
test_prog
=
fluid
.
Program
()
with
fluid
.
program_guard
(
model
.
test_prog
,
startup_prog
):
with
fluid
.
program_guard
(
model
.
test_prog
,
startup_prog
):
...
@@ -45,17 +45,12 @@ def load_model(model_dir):
...
@@ -45,17 +45,12 @@ def load_model(model_dir):
mode
=
'test'
)
mode
=
'test'
)
model
.
test_prog
=
model
.
test_prog
.
clone
(
for_test
=
True
)
model
.
test_prog
=
model
.
test_prog
.
clone
(
for_test
=
True
)
model
.
exe
.
run
(
startup_prog
)
model
.
exe
.
run
(
startup_prog
)
if
status
==
"Prune"
:
from
.slim.prune
import
update_program
model
.
test_prog
=
update_program
(
model
.
test_prog
,
model_dir
,
model
.
places
[
0
])
import
pickle
import
pickle
with
open
(
osp
.
join
(
model_dir
,
'model.pdparams'
),
'rb'
)
as
f
:
with
open
(
osp
.
join
(
model_dir
,
'model.pdparams'
),
'rb'
)
as
f
:
load_dict
=
pickle
.
load
(
f
)
load_dict
=
pickle
.
load
(
f
)
fluid
.
io
.
set_program_state
(
model
.
test_prog
,
load_dict
)
fluid
.
io
.
set_program_state
(
model
.
test_prog
,
load_dict
)
elif
status
==
"Infer"
or
\
elif
status
==
"Infer"
:
status
==
"Quant"
:
[
prog
,
input_names
,
outputs
]
=
fluid
.
io
.
load_inference_model
(
[
prog
,
input_names
,
outputs
]
=
fluid
.
io
.
load_inference_model
(
model_dir
,
model
.
exe
,
params_filename
=
'__params__'
)
model_dir
,
model
.
exe
,
params_filename
=
'__params__'
)
model
.
test_prog
=
prog
model
.
test_prog
=
prog
...
@@ -67,8 +62,8 @@ def load_model(model_dir):
...
@@ -67,8 +62,8 @@ def load_model(model_dir):
for
i
,
out
in
enumerate
(
outputs
):
for
i
,
out
in
enumerate
(
outputs
):
var_desc
=
test_outputs_info
[
i
]
var_desc
=
test_outputs_info
[
i
]
model
.
test_outputs
[
var_desc
[
0
]]
=
out
model
.
test_outputs
[
var_desc
[
0
]]
=
out
if
'
T
ransforms'
in
info
:
if
'
test_t
ransforms'
in
info
:
model
.
test_transforms
=
build_transforms
(
info
[
'
T
ransforms'
])
model
.
test_transforms
=
build_transforms
(
info
[
'
test_t
ransforms'
])
model
.
eval_transforms
=
copy
.
deepcopy
(
model
.
test_transforms
)
model
.
eval_transforms
=
copy
.
deepcopy
(
model
.
test_transforms
)
if
'_Attributes'
in
info
:
if
'_Attributes'
in
info
:
...
...
contrib/RemoteSensing/models/unet.py
浏览文件 @
7835c042
#copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
#Licensed under the Apache License, Version 2.0 (the "License");
#
Licensed under the Apache License, Version 2.0 (the "License");
#you may not use this file except in compliance with the License.
#
you may not use this file except in compliance with the License.
#You may obtain a copy of the License at
#
You may obtain a copy of the License at
#
#
# http://www.apache.org/licenses/LICENSE-2.0
# http://www.apache.org/licenses/LICENSE-2.0
#
#
#Unless required by applicable law or agreed to in writing, software
#
Unless required by applicable law or agreed to in writing, software
#distributed under the License is distributed on an "AS IS" BASIS,
#
distributed under the License is distributed on an "AS IS" BASIS,
#WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#See the License for the specific language governing permissions and
#
See the License for the specific language governing permissions and
#limitations under the License.
#
limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
import
os.path
as
osp
import
numpy
as
np
import
numpy
as
np
import
math
import
math
import
cv2
import
cv2
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
import
utils.logging
as
logging
import
utils.logging
as
logging
from
collections
import
OrderedDict
from
collections
import
OrderedDict
from
.base
import
Base
API
from
.base
import
Base
Model
from
utils.metrics
import
ConfusionMatrix
from
utils.metrics
import
ConfusionMatrix
import
nets
import
nets
class
UNet
(
Base
API
):
class
UNet
(
Base
Model
):
"""实现UNet网络的构建并进行训练、评估、预测和模型导出。
"""实现UNet网络的构建并进行训练、评估、预测和模型导出。
Args:
Args:
...
@@ -55,9 +55,16 @@ class UNet(BaseAPI):
...
@@ -55,9 +55,16 @@ class UNet(BaseAPI):
use_bce_loss
=
False
,
use_bce_loss
=
False
,
use_dice_loss
=
False
,
use_dice_loss
=
False
,
class_weight
=
None
,
class_weight
=
None
,
ignore_index
=
255
):
ignore_index
=
255
,
sync_bn
=
True
):
super
().
__init__
(
num_classes
=
num_classes
,
use_bce_loss
=
use_bce_loss
,
use_dice_loss
=
use_dice_loss
,
class_weight
=
class_weight
,
ignore_index
=
ignore_index
,
sync_bn
=
sync_bn
)
self
.
init_params
=
locals
()
self
.
init_params
=
locals
()
super
(
UNet
,
self
).
__init__
()
# dice_loss或bce_loss只适用两类分割中
# dice_loss或bce_loss只适用两类分割中
if
num_classes
>
2
and
(
use_bce_loss
or
use_dice_loss
):
if
num_classes
>
2
and
(
use_bce_loss
or
use_dice_loss
):
raise
ValueError
(
raise
ValueError
(
...
@@ -115,24 +122,6 @@ class UNet(BaseAPI):
...
@@ -115,24 +122,6 @@ class UNet(BaseAPI):
outputs
[
'logit'
]
=
model_out
[
1
]
outputs
[
'logit'
]
=
model_out
[
1
]
return
inputs
,
outputs
return
inputs
,
outputs
def
default_optimizer
(
self
,
learning_rate
,
num_epochs
,
num_steps_each_epoch
,
lr_decay_power
=
0.9
):
decay_step
=
num_epochs
*
num_steps_each_epoch
lr_decay
=
fluid
.
layers
.
polynomial_decay
(
learning_rate
,
decay_step
,
end_learning_rate
=
0
,
power
=
lr_decay_power
)
optimizer
=
fluid
.
optimizer
.
Momentum
(
lr_decay
,
momentum
=
0.9
,
regularization
=
fluid
.
regularizer
.
L2Decay
(
regularization_coeff
=
4e-05
))
return
optimizer
def
train
(
self
,
def
train
(
self
,
num_epochs
,
num_epochs
,
train_reader
,
train_reader
,
...
@@ -142,13 +131,13 @@ class UNet(BaseAPI):
...
@@ -142,13 +131,13 @@ class UNet(BaseAPI):
save_interval_epochs
=
1
,
save_interval_epochs
=
1
,
log_interval_steps
=
2
,
log_interval_steps
=
2
,
save_dir
=
'output'
,
save_dir
=
'output'
,
pretrain_weights
=
'COCO'
,
pretrain_weights
=
None
,
resume_weights
=
None
,
optimizer
=
None
,
optimizer
=
None
,
learning_rate
=
0.01
,
learning_rate
=
0.01
,
lr_decay_power
=
0.9
,
lr_decay_power
=
0.9
,
use_vdl
=
False
,
regularization_coeff
=
5e-4
,
sensitivities_file
=
None
,
use_vdl
=
False
):
eval_metric_loss
=
0.05
):
"""训练。
"""训练。
Args:
Args:
...
@@ -160,46 +149,17 @@ class UNet(BaseAPI):
...
@@ -160,46 +149,17 @@ class UNet(BaseAPI):
save_interval_epochs (int): 模型保存间隔(单位:迭代轮数)。默认为1。
save_interval_epochs (int): 模型保存间隔(单位:迭代轮数)。默认为1。
log_interval_steps (int): 训练日志输出间隔(单位:迭代次数)。默认为2。
log_interval_steps (int): 训练日志输出间隔(单位:迭代次数)。默认为2。
save_dir (str): 模型保存路径。默认'output'。
save_dir (str): 模型保存路径。默认'output'。
pretrain_weights (str): 若指定为路径时,则加载路径下预训练模型;若为字符串'COCO',
pretrain_weights (str): 若指定为路径时,则加载路径下预训练模型;若为None,则不使用预训练模型。
则自动下载在COCO图片数据上预训练的模型权重;若为None,则不使用预训练模型。默认为'COCO'。
optimizer (paddle.fluid.optimizer): 优化器。当改参数为None时,使用默认的优化器:使用
optimizer (paddle.fluid.optimizer): 优化器。当改参数为None时,使用默认的优化器:使用
fluid.optimizer.Momentum优化方法,polynomial的学习率衰减策略。
fluid.optimizer.Momentum优化方法,polynomial的学习率衰减策略。
learning_rate (float): 默认优化器的初始学习率。默认0.01。
learning_rate (float): 默认优化器的初始学习率。默认0.01。
lr_decay_power (float): 默认优化器学习率多项式衰减系数。默认0.9。
lr_decay_power (float): 默认优化器学习率多项式衰减系数。默认0.9。
use_vdl (bool): 是否使用VisualDL进行可视化。默认False。
use_vdl (bool): 是否使用VisualDL进行可视化。默认False。
sensitivities_file (str): 若指定为路径时,则加载路径下敏感度信息进行裁剪;若为字符串'DEFAULT',
则自动下载在ImageNet图片数据上获得的敏感度信息进行裁剪;若为None,则不进行裁剪。默认为None。
eval_metric_loss (float): 可容忍的精度损失。默认为0.05。
Raises:
Raises:
ValueError: 模型从inference model进行加载。
ValueError: 模型从inference model进行加载。
"""
"""
if
not
self
.
trainable
:
super
().
train
(
raise
ValueError
(
"Model is not trainable since it was loaded from a inference model."
)
self
.
labels
=
train_reader
.
labels
if
optimizer
is
None
:
num_steps_each_epoch
=
train_reader
.
num_samples
//
train_batch_size
optimizer
=
self
.
default_optimizer
(
learning_rate
=
learning_rate
,
num_epochs
=
num_epochs
,
num_steps_each_epoch
=
num_steps_each_epoch
,
lr_decay_power
=
lr_decay_power
)
self
.
optimizer
=
optimizer
# 构建训练、验证、预测网络
self
.
build_program
()
# 初始化网络权重
self
.
net_initialize
(
startup_prog
=
fluid
.
default_startup_program
(),
pretrain_weights
=
pretrain_weights
,
save_dir
=
save_dir
,
sensitivities_file
=
sensitivities_file
,
eval_metric_loss
=
eval_metric_loss
)
# 训练
self
.
train_loop
(
num_epochs
=
num_epochs
,
num_epochs
=
num_epochs
,
train_reader
=
train_reader
,
train_reader
=
train_reader
,
train_batch_size
=
train_batch_size
,
train_batch_size
=
train_batch_size
,
...
@@ -208,6 +168,12 @@ class UNet(BaseAPI):
...
@@ -208,6 +168,12 @@ class UNet(BaseAPI):
save_interval_epochs
=
save_interval_epochs
,
save_interval_epochs
=
save_interval_epochs
,
log_interval_steps
=
log_interval_steps
,
log_interval_steps
=
log_interval_steps
,
save_dir
=
save_dir
,
save_dir
=
save_dir
,
pretrain_weights
=
pretrain_weights
,
resume_weights
=
resume_weights
,
optimizer
=
optimizer
,
learning_rate
=
learning_rate
,
lr_decay_power
=
lr_decay_power
,
regularization_coeff
=
regularization_coeff
,
use_vdl
=
use_vdl
)
use_vdl
=
use_vdl
)
def
evaluate
(
self
,
def
evaluate
(
self
,
...
@@ -231,7 +197,7 @@ class UNet(BaseAPI):
...
@@ -231,7 +197,7 @@ class UNet(BaseAPI):
tuple (metrics, eval_details):当return_details为True时,增加返回dict (eval_details),
tuple (metrics, eval_details):当return_details为True时,增加返回dict (eval_details),
包含关键字:'confusion_matrix',表示评估的混淆矩阵。
包含关键字:'confusion_matrix',表示评估的混淆矩阵。
"""
"""
self
.
arrange_transform
s
(
transforms
=
eval_reader
.
transforms
,
mode
=
'eval'
)
self
.
arrange_transform
(
transforms
=
eval_reader
.
transforms
,
mode
=
'eval'
)
total_steps
=
math
.
ceil
(
eval_reader
.
num_samples
*
1.0
/
batch_size
)
total_steps
=
math
.
ceil
(
eval_reader
.
num_samples
*
1.0
/
batch_size
)
conf_mat
=
ConfusionMatrix
(
self
.
num_classes
,
streaming
=
True
)
conf_mat
=
ConfusionMatrix
(
self
.
num_classes
,
streaming
=
True
)
data_generator
=
eval_reader
.
generator
(
data_generator
=
eval_reader
.
generator
(
...
@@ -272,11 +238,16 @@ class UNet(BaseAPI):
...
@@ -272,11 +238,16 @@ class UNet(BaseAPI):
category_iou
,
miou
=
conf_mat
.
mean_iou
()
category_iou
,
miou
=
conf_mat
.
mean_iou
()
category_acc
,
macc
=
conf_mat
.
accuracy
()
category_acc
,
macc
=
conf_mat
.
accuracy
()
precision
,
recall
=
conf_mat
.
precision_recall
()
metrics
=
OrderedDict
(
metrics
=
OrderedDict
(
zip
([
'miou'
,
'category_iou'
,
'macc'
,
'category_acc'
,
'kappa'
],
zip
([
[
miou
,
category_iou
,
macc
,
category_acc
,
'miou'
,
'category_iou'
,
'macc'
,
'category_acc'
,
'kappa'
,
conf_mat
.
kappa
()]))
'precision'
,
'recall'
],
[
miou
,
category_iou
,
macc
,
category_acc
,
conf_mat
.
kappa
(),
precision
,
recall
]))
if
return_details
:
if
return_details
:
eval_details
=
{
eval_details
=
{
'confusion_matrix'
:
conf_mat
.
confusion_matrix
.
tolist
()
'confusion_matrix'
:
conf_mat
.
confusion_matrix
.
tolist
()
...
@@ -296,11 +267,10 @@ class UNet(BaseAPI):
...
@@ -296,11 +267,10 @@ class UNet(BaseAPI):
if
transforms
is
None
and
not
hasattr
(
self
,
'test_transforms'
):
if
transforms
is
None
and
not
hasattr
(
self
,
'test_transforms'
):
raise
Exception
(
"transforms need to be defined, now is None."
)
raise
Exception
(
"transforms need to be defined, now is None."
)
if
transforms
is
not
None
:
if
transforms
is
not
None
:
self
.
arrange_transform
s
(
transforms
=
transforms
,
mode
=
'test'
)
self
.
arrange_transform
(
transforms
=
transforms
,
mode
=
'test'
)
im
,
im_info
=
transforms
(
im_file
)
im
,
im_info
=
transforms
(
im_file
)
else
:
else
:
self
.
arrange_transforms
(
self
.
arrange_transform
(
transforms
=
self
.
test_transforms
,
mode
=
'test'
)
transforms
=
self
.
test_transforms
,
mode
=
'test'
)
im
,
im_info
=
self
.
test_transforms
(
im_file
)
im
,
im_info
=
self
.
test_transforms
(
im_file
)
im
=
im
.
astype
(
np
.
float32
)
im
=
im
.
astype
(
np
.
float32
)
im
=
np
.
expand_dims
(
im
,
axis
=
0
)
im
=
np
.
expand_dims
(
im
,
axis
=
0
)
...
@@ -319,4 +289,4 @@ class UNet(BaseAPI):
...
@@ -319,4 +289,4 @@ class UNet(BaseAPI):
h
,
w
=
im_info
[
k
][
0
],
im_info
[
k
][
1
]
h
,
w
=
im_info
[
k
][
0
],
im_info
[
k
][
1
]
pred
=
pred
[
0
:
h
,
0
:
w
]
pred
=
pred
[
0
:
h
,
0
:
w
]
return
pred
return
{
'label_map'
:
pred
}
contrib/RemoteSensing/nets/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
.unet
import
UNet
from
.unet
import
UNet
from
.hrnet
import
HRNet
contrib/RemoteSensing/nets/hrnet.py
0 → 100644
浏览文件 @
7835c042
# coding: utf8
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
print_function
from
collections
import
OrderedDict
import
paddle.fluid
as
fluid
from
paddle.fluid.initializer
import
MSRA
from
paddle.fluid.param_attr
import
ParamAttr
from
.loss
import
softmax_with_loss
from
.loss
import
dice_loss
from
.loss
import
bce_loss
from
.libs
import
sigmoid_to_softmax
class
HRNet
(
object
):
def
__init__
(
self
,
num_classes
,
input_channel
=
3
,
mode
=
'train'
,
stage1_num_modules
=
1
,
stage1_num_blocks
=
[
4
],
stage1_num_channels
=
[
64
],
stage2_num_modules
=
1
,
stage2_num_blocks
=
[
4
,
4
],
stage2_num_channels
=
[
18
,
36
],
stage3_num_modules
=
4
,
stage3_num_blocks
=
[
4
,
4
,
4
],
stage3_num_channels
=
[
18
,
36
,
72
],
stage4_num_modules
=
3
,
stage4_num_blocks
=
[
4
,
4
,
4
,
4
],
stage4_num_channels
=
[
18
,
36
,
72
,
144
],
use_bce_loss
=
False
,
use_dice_loss
=
False
,
class_weight
=
None
,
ignore_index
=
255
):
# dice_loss或bce_loss只适用两类分割中
if
num_classes
>
2
and
(
use_bce_loss
or
use_dice_loss
):
raise
ValueError
(
"dice loss and bce loss is only applicable to binary classfication"
)
if
class_weight
is
not
None
:
if
isinstance
(
class_weight
,
list
):
if
len
(
class_weight
)
!=
num_classes
:
raise
ValueError
(
"Length of class_weight should be equal to number of classes"
)
elif
isinstance
(
class_weight
,
str
):
if
class_weight
.
lower
()
!=
'dynamic'
:
raise
ValueError
(
"if class_weight is string, must be dynamic!"
)
else
:
raise
TypeError
(
'Expect class_weight is a list or string but receive {}'
.
format
(
type
(
class_weight
)))
self
.
num_classes
=
num_classes
self
.
input_channel
=
input_channel
self
.
mode
=
mode
self
.
use_bce_loss
=
use_bce_loss
self
.
use_dice_loss
=
use_dice_loss
self
.
class_weight
=
class_weight
self
.
ignore_index
=
ignore_index
self
.
stage1_num_modules
=
stage1_num_modules
self
.
stage1_num_blocks
=
stage1_num_blocks
self
.
stage1_num_channels
=
stage1_num_channels
self
.
stage2_num_modules
=
stage2_num_modules
self
.
stage2_num_blocks
=
stage2_num_blocks
self
.
stage2_num_channels
=
stage2_num_channels
self
.
stage3_num_modules
=
stage3_num_modules
self
.
stage3_num_blocks
=
stage3_num_blocks
self
.
stage3_num_channels
=
stage3_num_channels
self
.
stage4_num_modules
=
stage4_num_modules
self
.
stage4_num_blocks
=
stage4_num_blocks
self
.
stage4_num_channels
=
stage4_num_channels
def
build_net
(
self
,
inputs
):
if
self
.
use_dice_loss
or
self
.
use_bce_loss
:
self
.
num_classes
=
1
image
=
inputs
[
'image'
]
logit
=
self
.
_high_resolution_net
(
image
,
self
.
num_classes
)
if
self
.
num_classes
==
1
:
out
=
sigmoid_to_softmax
(
logit
)
out
=
fluid
.
layers
.
transpose
(
out
,
[
0
,
2
,
3
,
1
])
else
:
out
=
fluid
.
layers
.
transpose
(
logit
,
[
0
,
2
,
3
,
1
])
pred
=
fluid
.
layers
.
argmax
(
out
,
axis
=
3
)
pred
=
fluid
.
layers
.
unsqueeze
(
pred
,
axes
=
[
3
])
if
self
.
mode
==
'train'
:
label
=
inputs
[
'label'
]
mask
=
label
!=
self
.
ignore_index
return
self
.
_get_loss
(
logit
,
label
,
mask
)
else
:
if
self
.
num_classes
==
1
:
logit
=
sigmoid_to_softmax
(
logit
)
else
:
logit
=
fluid
.
layers
.
softmax
(
logit
,
axis
=
1
)
return
pred
,
logit
return
logit
def
generate_inputs
(
self
):
inputs
=
OrderedDict
()
inputs
[
'image'
]
=
fluid
.
data
(
dtype
=
'float32'
,
shape
=
[
None
,
self
.
input_channel
,
None
,
None
],
name
=
'image'
)
if
self
.
mode
==
'train'
:
inputs
[
'label'
]
=
fluid
.
data
(
dtype
=
'int32'
,
shape
=
[
None
,
1
,
None
,
None
],
name
=
'label'
)
elif
self
.
mode
==
'eval'
:
inputs
[
'label'
]
=
fluid
.
data
(
dtype
=
'int32'
,
shape
=
[
None
,
1
,
None
,
None
],
name
=
'label'
)
return
inputs
def
_get_loss
(
self
,
logit
,
label
,
mask
):
avg_loss
=
0
if
not
(
self
.
use_dice_loss
or
self
.
use_bce_loss
):
avg_loss
+=
softmax_with_loss
(
logit
,
label
,
mask
,
num_classes
=
self
.
num_classes
,
weight
=
self
.
class_weight
,
ignore_index
=
self
.
ignore_index
)
else
:
if
self
.
use_dice_loss
:
avg_loss
+=
dice_loss
(
logit
,
label
,
mask
)
if
self
.
use_bce_loss
:
avg_loss
+=
bce_loss
(
logit
,
label
,
mask
,
ignore_index
=
self
.
ignore_index
)
return
avg_loss
def
_conv_bn_layer
(
self
,
input
,
filter_size
,
num_filters
,
stride
=
1
,
padding
=
1
,
num_groups
=
1
,
if_act
=
True
,
name
=
None
):
conv
=
fluid
.
layers
.
conv2d
(
input
=
input
,
num_filters
=
num_filters
,
filter_size
=
filter_size
,
stride
=
stride
,
padding
=
(
filter_size
-
1
)
//
2
,
groups
=
num_groups
,
act
=
None
,
param_attr
=
ParamAttr
(
initializer
=
MSRA
(),
name
=
name
+
'_weights'
),
bias_attr
=
False
)
bn_name
=
name
+
'_bn'
bn
=
fluid
.
layers
.
batch_norm
(
input
=
conv
,
param_attr
=
ParamAttr
(
name
=
bn_name
+
"_scale"
,
initializer
=
fluid
.
initializer
.
Constant
(
1.0
)),
bias_attr
=
ParamAttr
(
name
=
bn_name
+
"_offset"
,
initializer
=
fluid
.
initializer
.
Constant
(
0.0
)),
moving_mean_name
=
bn_name
+
'_mean'
,
moving_variance_name
=
bn_name
+
'_variance'
)
if
if_act
:
bn
=
fluid
.
layers
.
relu
(
bn
)
return
bn
def
_basic_block
(
self
,
input
,
num_filters
,
stride
=
1
,
downsample
=
False
,
name
=
None
):
residual
=
input
conv
=
self
.
_conv_bn_layer
(
input
=
input
,
filter_size
=
3
,
num_filters
=
num_filters
,
stride
=
stride
,
name
=
name
+
'_conv1'
)
conv
=
self
.
_conv_bn_layer
(
input
=
conv
,
filter_size
=
3
,
num_filters
=
num_filters
,
if_act
=
False
,
name
=
name
+
'_conv2'
)
if
downsample
:
residual
=
self
.
_conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
,
if_act
=
False
,
name
=
name
+
'_downsample'
)
return
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
conv
,
act
=
'relu'
)
def
_bottleneck_block
(
self
,
input
,
num_filters
,
stride
=
1
,
downsample
=
False
,
name
=
None
):
residual
=
input
conv
=
self
.
_conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
,
name
=
name
+
'_conv1'
)
conv
=
self
.
_conv_bn_layer
(
input
=
conv
,
filter_size
=
3
,
num_filters
=
num_filters
,
stride
=
stride
,
name
=
name
+
'_conv2'
)
conv
=
self
.
_conv_bn_layer
(
input
=
conv
,
filter_size
=
1
,
num_filters
=
num_filters
*
4
,
if_act
=
False
,
name
=
name
+
'_conv3'
)
if
downsample
:
residual
=
self
.
_conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
*
4
,
if_act
=
False
,
name
=
name
+
'_downsample'
)
return
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
conv
,
act
=
'relu'
)
def
_fuse_layers
(
self
,
x
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
out
=
[]
for
i
in
range
(
len
(
channels
)
if
multi_scale_output
else
1
):
residual
=
x
[
i
]
shape
=
fluid
.
layers
.
shape
(
residual
)[
-
2
:]
for
j
in
range
(
len
(
channels
)):
if
j
>
i
:
y
=
self
.
_conv_bn_layer
(
x
[
j
],
filter_size
=
1
,
num_filters
=
channels
[
i
],
if_act
=
False
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
))
y
=
fluid
.
layers
.
resize_bilinear
(
input
=
y
,
out_shape
=
shape
)
residual
=
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
y
,
act
=
None
)
elif
j
<
i
:
y
=
x
[
j
]
for
k
in
range
(
i
-
j
):
if
k
==
i
-
j
-
1
:
y
=
self
.
_conv_bn_layer
(
y
,
filter_size
=
3
,
num_filters
=
channels
[
i
],
stride
=
2
,
if_act
=
False
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
)
+
'_'
+
str
(
k
+
1
))
else
:
y
=
self
.
_conv_bn_layer
(
y
,
filter_size
=
3
,
num_filters
=
channels
[
j
],
stride
=
2
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
)
+
'_'
+
str
(
k
+
1
))
residual
=
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
y
,
act
=
None
)
residual
=
fluid
.
layers
.
relu
(
residual
)
out
.
append
(
residual
)
return
out
def
_branches
(
self
,
x
,
block_num
,
channels
,
name
=
None
):
out
=
[]
for
i
in
range
(
len
(
channels
)):
residual
=
x
[
i
]
for
j
in
range
(
block_num
[
i
]):
residual
=
self
.
_basic_block
(
residual
,
channels
[
i
],
name
=
name
+
'_branch_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
))
out
.
append
(
residual
)
return
out
def
_high_resolution_module
(
self
,
x
,
blocks
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
residual
=
self
.
_branches
(
x
,
blocks
,
channels
,
name
=
name
)
out
=
self
.
_fuse_layers
(
residual
,
channels
,
multi_scale_output
=
multi_scale_output
,
name
=
name
)
return
out
def
_transition_layer
(
self
,
x
,
in_channels
,
out_channels
,
name
=
None
):
num_in
=
len
(
in_channels
)
num_out
=
len
(
out_channels
)
out
=
[]
for
i
in
range
(
num_out
):
if
i
<
num_in
:
if
in_channels
[
i
]
!=
out_channels
[
i
]:
residual
=
self
.
_conv_bn_layer
(
x
[
i
],
filter_size
=
3
,
num_filters
=
out_channels
[
i
],
name
=
name
+
'_layer_'
+
str
(
i
+
1
))
out
.
append
(
residual
)
else
:
out
.
append
(
x
[
i
])
else
:
residual
=
self
.
_conv_bn_layer
(
x
[
-
1
],
filter_size
=
3
,
num_filters
=
out_channels
[
i
],
stride
=
2
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
))
out
.
append
(
residual
)
return
out
def
_stage
(
self
,
x
,
num_modules
,
num_blocks
,
num_channels
,
multi_scale_output
=
True
,
name
=
None
):
out
=
x
for
i
in
range
(
num_modules
):
if
i
==
num_modules
-
1
and
multi_scale_output
==
False
:
out
=
self
.
_high_resolution_module
(
out
,
num_blocks
,
num_channels
,
multi_scale_output
=
False
,
name
=
name
+
'_'
+
str
(
i
+
1
))
else
:
out
=
self
.
_high_resolution_module
(
out
,
num_blocks
,
num_channels
,
name
=
name
+
'_'
+
str
(
i
+
1
))
return
out
def
_layer1
(
self
,
input
,
num_modules
,
num_blocks
,
num_channels
,
name
=
None
):
# num_modules 默认为1,是否增加处理,官网实现为[1],是否对齐。
conv
=
input
for
i
in
range
(
num_blocks
[
0
]):
conv
=
self
.
_bottleneck_block
(
conv
,
num_filters
=
num_channels
[
0
],
downsample
=
True
if
i
==
0
else
False
,
name
=
name
+
'_'
+
str
(
i
+
1
))
return
conv
def
_high_resolution_net
(
self
,
input
,
num_classes
):
x
=
self
.
_conv_bn_layer
(
input
=
input
,
filter_size
=
3
,
num_filters
=
self
.
stage1_num_channels
[
0
],
stride
=
2
,
if_act
=
True
,
name
=
'layer1_1'
)
x
=
self
.
_conv_bn_layer
(
input
=
x
,
filter_size
=
3
,
num_filters
=
self
.
stage1_num_channels
[
0
],
stride
=
2
,
if_act
=
True
,
name
=
'layer1_2'
)
la1
=
self
.
_layer1
(
x
,
self
.
stage1_num_modules
,
self
.
stage1_num_blocks
,
self
.
stage1_num_channels
,
name
=
'layer2'
)
tr1
=
self
.
_transition_layer
([
la1
],
self
.
stage1_num_channels
,
self
.
stage2_num_channels
,
name
=
'tr1'
)
st2
=
self
.
_stage
(
tr1
,
self
.
stage2_num_modules
,
self
.
stage2_num_blocks
,
self
.
stage2_num_channels
,
name
=
'st2'
)
tr2
=
self
.
_transition_layer
(
st2
,
self
.
stage2_num_channels
,
self
.
stage3_num_channels
,
name
=
'tr2'
)
st3
=
self
.
_stage
(
tr2
,
self
.
stage3_num_modules
,
self
.
stage3_num_blocks
,
self
.
stage3_num_channels
,
name
=
'st3'
)
tr3
=
self
.
_transition_layer
(
st3
,
self
.
stage3_num_channels
,
self
.
stage4_num_channels
,
name
=
'tr3'
)
st4
=
self
.
_stage
(
tr3
,
self
.
stage4_num_modules
,
self
.
stage4_num_blocks
,
self
.
stage4_num_channels
,
name
=
'st4'
)
# upsample
shape
=
fluid
.
layers
.
shape
(
st4
[
0
])[
-
2
:]
st4
[
1
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
1
],
out_shape
=
shape
)
st4
[
2
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
2
],
out_shape
=
shape
)
st4
[
3
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
3
],
out_shape
=
shape
)
out
=
fluid
.
layers
.
concat
(
st4
,
axis
=
1
)
last_channels
=
sum
(
self
.
stage4_num_channels
)
out
=
self
.
_conv_bn_layer
(
input
=
out
,
filter_size
=
1
,
num_filters
=
last_channels
,
stride
=
1
,
if_act
=
True
,
name
=
'conv-2'
)
out
=
fluid
.
layers
.
conv2d
(
input
=
out
,
num_filters
=
num_classes
,
filter_size
=
1
,
stride
=
1
,
padding
=
0
,
act
=
None
,
param_attr
=
ParamAttr
(
initializer
=
MSRA
(),
name
=
'conv-1_weights'
),
bias_attr
=
False
)
input_shape
=
fluid
.
layers
.
shape
(
input
)[
-
2
:]
out
=
fluid
.
layers
.
resize_bilinear
(
out
,
input_shape
)
return
out
contrib/RemoteSensing/nets/libs.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
copyright (c) 2020
PaddlePaddle Authors. All Rights Reserve.
#
Copyright (c) 2019
PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/nets/loss.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/nets/unet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
copyright (c) 2020
PaddlePaddle Authors. All Rights Reserve.
#
Copyright (c) 2019
PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/predict_demo.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os
import
os
import
os.path
as
osp
import
os.path
as
osp
import
sys
import
numpy
as
np
import
numpy
as
np
from
PIL
import
Image
as
Image
from
PIL
import
Image
as
Image
import
argparse
import
argparse
...
@@ -8,35 +24,65 @@ from models import load_model
...
@@ -8,35 +24,65 @@ from models import load_model
def
parse_args
():
def
parse_args
():
parser
=
argparse
.
ArgumentParser
(
description
=
'RemoteSensing predict'
)
parser
=
argparse
.
ArgumentParser
(
description
=
'RemoteSensing predict'
)
parser
.
add_argument
(
'--single_img'
,
dest
=
'single_img'
,
help
=
'single image path to predict'
,
default
=
None
,
type
=
str
)
parser
.
add_argument
(
parser
.
add_argument
(
'--data_dir'
,
'--data_dir'
,
dest
=
'data_dir'
,
dest
=
'data_dir'
,
help
=
'dataset directory'
,
help
=
'dataset directory'
,
default
=
None
,
default
=
None
,
type
=
str
)
type
=
str
)
parser
.
add_argument
(
'--file_list'
,
dest
=
'file_list'
,
help
=
'file name of predict file list'
,
default
=
None
,
type
=
str
)
parser
.
add_argument
(
parser
.
add_argument
(
'--load_model_dir'
,
'--load_model_dir'
,
dest
=
'load_model_dir'
,
dest
=
'load_model_dir'
,
help
=
'model load directory'
,
help
=
'model load directory'
,
default
=
None
,
default
=
None
,
type
=
str
)
type
=
str
)
parser
.
add_argument
(
'--save_img_dir'
,
dest
=
'save_img_dir'
,
help
=
'save directory name of predict results'
,
default
=
'predict_results'
,
type
=
str
)
if
len
(
sys
.
argv
)
<
2
:
parser
.
print_help
()
sys
.
exit
(
1
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
args
=
parse_args
()
args
=
parse_args
()
data_dir
=
args
.
data_dir
data_dir
=
args
.
data_dir
file_list
=
args
.
file_list
single_img
=
args
.
single_img
load_model_dir
=
args
.
load_model_dir
load_model_dir
=
args
.
load_model_dir
save_img_dir
=
args
.
save_img_dir
if
not
osp
.
exists
(
save_img_dir
):
os
.
makedirs
(
save_img_dir
)
# predict
# predict
model
=
load_model
(
load_model_dir
)
model
=
load_model
(
load_model_dir
)
pred_dir
=
osp
.
join
(
load_model_dir
,
'predict'
)
if
not
osp
.
exists
(
pred_dir
):
os
.
mkdir
(
pred_dir
)
val_list
=
osp
.
join
(
data_dir
,
'val.txt'
)
color_map
=
[
0
,
0
,
0
,
0
,
255
,
0
]
color_map
=
[
0
,
0
,
0
,
255
,
255
,
255
]
if
single_img
is
not
None
:
with
open
(
val_list
)
as
f
:
pred
=
model
.
predict
(
single_img
)
# 以伪彩色png图片保存预测结果
pred_name
=
osp
.
basename
(
single_img
).
rstrip
(
'npy'
)
+
'png'
pred_path
=
osp
.
join
(
save_img_dir
,
pred_name
)
pred_mask
=
Image
.
fromarray
(
pred
[
'label_map'
].
astype
(
np
.
uint8
),
mode
=
'P'
)
pred_mask
.
putpalette
(
color_map
)
pred_mask
.
save
(
pred_path
)
elif
(
file_list
is
not
None
)
and
(
data_dir
is
not
None
):
with
open
(
osp
.
join
(
data_dir
,
file_list
))
as
f
:
lines
=
f
.
readlines
()
lines
=
f
.
readlines
()
for
line
in
lines
:
for
line
in
lines
:
img_path
=
line
.
split
(
' '
)[
0
]
img_path
=
line
.
split
(
' '
)[
0
]
...
@@ -47,7 +93,12 @@ with open(val_list) as f:
...
@@ -47,7 +93,12 @@ with open(val_list) as f:
# 以伪彩色png图片保存预测结果
# 以伪彩色png图片保存预测结果
pred_name
=
osp
.
basename
(
img_path
).
rstrip
(
'npy'
)
+
'png'
pred_name
=
osp
.
basename
(
img_path
).
rstrip
(
'npy'
)
+
'png'
pred_path
=
osp
.
join
(
pred_dir
,
pred_name
)
pred_path
=
osp
.
join
(
save_img_dir
,
pred_name
)
pred_mask
=
Image
.
fromarray
(
pred
.
astype
(
np
.
uint8
),
mode
=
'P'
)
pred_mask
=
Image
.
fromarray
(
pred
[
'label_map'
].
astype
(
np
.
uint8
),
mode
=
'P'
)
pred_mask
.
putpalette
(
color_map
)
pred_mask
.
putpalette
(
color_map
)
pred_mask
.
save
(
pred_path
)
pred_mask
.
save
(
pred_path
)
else
:
raise
Exception
(
'You should either set the parameter single_img, or set the parameters data_dir, file_list.'
)
contrib/RemoteSensing/readers/__init__.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/readers/base.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/readers/reader.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/requirements.txt
浏览文件 @
7835c042
visualdl
== 2.0.0b1
visualdl
>= 2.0.0b
contrib/RemoteSensing/tools/create_dataset_list.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/tools/split_dataset_list.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/train_demo.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os.path
as
osp
import
os.path
as
osp
import
argparse
import
argparse
import
transforms.transforms
as
T
import
transforms.transforms
as
T
from
readers.reader
import
Reader
from
readers.reader
import
Reader
from
models
import
UNet
from
models
import
UNet
,
HRNet
def
parse_args
():
def
parse_args
():
parser
=
argparse
.
ArgumentParser
(
description
=
'RemoteSensing training'
)
parser
=
argparse
.
ArgumentParser
(
description
=
'RemoteSensing training'
)
parser
.
add_argument
(
'--model_type'
,
dest
=
'model_type'
,
help
=
"Model type for traing, which is one of ('unet', 'hrnet')"
,
type
=
str
,
default
=
'hrnet'
)
parser
.
add_argument
(
parser
.
add_argument
(
'--data_dir'
,
'--data_dir'
,
dest
=
'data_dir'
,
dest
=
'data_dir'
,
...
@@ -43,7 +64,6 @@ def parse_args():
...
@@ -43,7 +64,6 @@ def parse_args():
args
=
parse_args
()
args
=
parse_args
()
data_dir
=
args
.
data_dir
data_dir
=
args
.
data_dir
save_dir
=
args
.
save_dir
save_dir
=
args
.
save_dir
channel
=
args
.
channel
channel
=
args
.
channel
...
@@ -52,17 +72,9 @@ train_batch_size = args.train_batch_size
...
@@ -52,17 +72,9 @@ train_batch_size = args.train_batch_size
lr
=
args
.
lr
lr
=
args
.
lr
# 定义训练和验证时的transforms
# 定义训练和验证时的transforms
train_transforms
=
T
.
Compose
([
train_transforms
=
T
.
Compose
([
T
.
RandomHorizontalFlip
(
0.5
),
T
.
Normalize
()])
T
.
RandomVerticalFlip
(
0.5
),
T
.
RandomHorizontalFlip
(
0.5
),
T
.
ResizeStepScaling
(
0.5
,
2.0
,
0.25
),
T
.
RandomPaddingCrop
(
256
),
T
.
Normalize
(
mean
=
[
0.5
]
*
channel
,
std
=
[
0.5
]
*
channel
),
])
eval_transforms
=
T
.
Compose
([
eval_transforms
=
T
.
Compose
([
T
.
Normalize
()])
T
.
Normalize
(
mean
=
[
0.5
]
*
channel
,
std
=
[
0.5
]
*
channel
),
])
train_list
=
osp
.
join
(
data_dir
,
'train.txt'
)
train_list
=
osp
.
join
(
data_dir
,
'train.txt'
)
val_list
=
osp
.
join
(
data_dir
,
'val.txt'
)
val_list
=
osp
.
join
(
data_dir
,
'val.txt'
)
...
@@ -74,23 +86,30 @@ train_reader = Reader(
...
@@ -74,23 +86,30 @@ train_reader = Reader(
file_list
=
train_list
,
file_list
=
train_list
,
label_list
=
label_list
,
label_list
=
label_list
,
transforms
=
train_transforms
,
transforms
=
train_transforms
,
num_workers
=
8
,
shuffle
=
True
)
buffer_size
=
16
,
shuffle
=
True
,
parallel_method
=
'thread'
)
eval_reader
=
Reader
(
eval_reader
=
Reader
(
data_dir
=
data_dir
,
data_dir
=
data_dir
,
file_list
=
val_list
,
file_list
=
val_list
,
label_list
=
label_list
,
label_list
=
label_list
,
transforms
=
eval_transforms
,
transforms
=
eval_transforms
)
num_workers
=
8
,
buffer_size
=
16
,
shuffle
=
False
,
parallel_method
=
'thread'
)
model
=
UNet
(
if
args
.
model_type
==
'unet'
:
num_classes
=
2
,
input_channel
=
channel
,
use_bce_loss
=
True
,
use_dice_loss
=
True
)
model
=
UNet
(
num_classes
=
2
,
input_channel
=
channel
,
use_bce_loss
=
True
,
use_dice_loss
=
True
)
elif
args
.
model_type
==
'hrnet'
:
model
=
HRNet
(
num_classes
=
2
,
input_channel
=
channel
,
use_bce_loss
=
True
,
use_dice_loss
=
True
)
else
:
raise
ValueError
(
"--model_type: {} is set wrong, it shold be one of ('unet', "
"'hrnet')"
.
format
(
args
.
model_type
))
model
.
train
(
model
.
train
(
num_epochs
=
num_epochs
,
num_epochs
=
num_epochs
,
...
@@ -100,7 +119,5 @@ model.train(
...
@@ -100,7 +119,5 @@ model.train(
save_interval_epochs
=
5
,
save_interval_epochs
=
5
,
log_interval_steps
=
10
,
log_interval_steps
=
10
,
save_dir
=
save_dir
,
save_dir
=
save_dir
,
pretrain_weights
=
None
,
optimizer
=
None
,
learning_rate
=
lr
,
learning_rate
=
lr
,
use_vdl
=
True
)
use_vdl
=
True
)
contrib/RemoteSensing/transforms/__init__.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/RemoteSensing/transforms/ops.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/transforms/transforms.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
copyright (c) 2020
PaddlePaddle Authors. All Rights Reserve.
#
Copyright (c) 2019
PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/utils/__init__.py
浏览文件 @
7835c042
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/RemoteSensing/utils/logging.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
contrib/RemoteSensing/utils/metrics.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -143,3 +143,14 @@ class ConfusionMatrix(object):
...
@@ -143,3 +143,14 @@ class ConfusionMatrix(object):
kappa
=
(
po
-
pe
)
/
(
1
-
pe
)
kappa
=
(
po
-
pe
)
/
(
1
-
pe
)
return
kappa
return
kappa
def
precision_recall
(
self
):
'''
precision, recall of foreground(value=1) for 2 categories
'''
TP
=
self
.
confusion_matrix
[
1
,
1
]
FN
=
self
.
confusion_matrix
[
1
,
0
]
FP
=
self
.
confusion_matrix
[
0
,
1
]
recall
=
TP
/
(
TP
+
FN
)
precision
=
TP
/
(
TP
+
FP
)
return
precision
,
recall
contrib/RemoteSensing/utils/pretrain_weights.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os.path
as
osp
import
os.path
as
osp
...
...
contrib/RemoteSensing/utils/utils.py
浏览文件 @
7835c042
# copyright (c) 2020 PaddlePaddle Authors. All Rights Reserve.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -12,13 +13,10 @@
...
@@ -12,13 +13,10 @@
# See the License for the specific language governing permissions and
# See the License for the specific language governing permissions and
# limitations under the License.
# limitations under the License.
import
sys
import
time
import
os
import
os
import
os.path
as
osp
import
os.path
as
osp
import
numpy
as
np
import
numpy
as
np
import
six
import
six
import
yaml
import
math
import
math
from
.
import
logging
from
.
import
logging
...
@@ -204,11 +202,9 @@ def load_pretrain_weights(exe, main_prog, weights_dir, fuse_bn=False):
...
@@ -204,11 +202,9 @@ def load_pretrain_weights(exe, main_prog, weights_dir, fuse_bn=False):
vars_to_load
.
append
(
var
)
vars_to_load
.
append
(
var
)
logging
.
debug
(
"Weight {} will be load"
.
format
(
var
.
name
))
logging
.
debug
(
"Weight {} will be load"
.
format
(
var
.
name
))
fluid
.
io
.
load_vars
(
params_dict
=
fluid
.
io
.
load_program_state
(
executor
=
exe
,
weights_dir
,
var_list
=
vars_to_load
)
dirname
=
weights_dir
,
fluid
.
io
.
set_program_state
(
main_prog
,
params_dict
)
main_program
=
main_prog
,
vars
=
vars_to_load
)
if
len
(
vars_to_load
)
==
0
:
if
len
(
vars_to_load
)
==
0
:
logging
.
warning
(
logging
.
warning
(
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
...
...
contrib/RoadLine/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
contrib/RoadLine/config.py
浏览文件 @
7835c042
# -*- coding: utf-8 -*-
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
utils.util
import
AttrDict
,
merge_cfg_from_args
,
get_arguments
from
utils.util
import
AttrDict
,
merge_cfg_from_args
,
get_arguments
import
os
import
os
...
@@ -6,13 +20,13 @@ args = get_arguments()
...
@@ -6,13 +20,13 @@ args = get_arguments()
cfg
=
AttrDict
()
cfg
=
AttrDict
()
# 待预测图像所在路径
# 待预测图像所在路径
cfg
.
data_dir
=
os
.
path
.
join
(
args
.
example
,
"data"
,
"test_images"
)
cfg
.
data_dir
=
os
.
path
.
join
(
args
.
example
,
"data"
,
"test_images"
)
# 待预测图像名称列表
# 待预测图像名称列表
cfg
.
data_list_file
=
os
.
path
.
join
(
args
.
example
,
"data"
,
"test.txt"
)
cfg
.
data_list_file
=
os
.
path
.
join
(
args
.
example
,
"data"
,
"test.txt"
)
# 模型加载路径
# 模型加载路径
cfg
.
model_path
=
os
.
path
.
join
(
args
.
example
,
"model"
)
cfg
.
model_path
=
os
.
path
.
join
(
args
.
example
,
"model"
)
# 预测结果保存路径
# 预测结果保存路径
cfg
.
vis_dir
=
os
.
path
.
join
(
args
.
example
,
"result"
)
cfg
.
vis_dir
=
os
.
path
.
join
(
args
.
example
,
"result"
)
# 预测类别数
# 预测类别数
cfg
.
class_num
=
2
cfg
.
class_num
=
2
...
...
contrib/RoadLine/download_RoadLine.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
contrib/RoadLine/infer.py
浏览文件 @
7835c042
# -*- coding: utf-8 -*-
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os
import
os
import
cv2
import
cv2
import
numpy
as
np
import
numpy
as
np
...
@@ -12,10 +26,11 @@ config = importlib.import_module('config')
...
@@ -12,10 +26,11 @@ config = importlib.import_module('config')
cfg
=
getattr
(
config
,
'cfg'
)
cfg
=
getattr
(
config
,
'cfg'
)
# paddle垃圾回收策略FLAG,ACE2P模型较大,当显存不够时建议开启
# paddle垃圾回收策略FLAG,ACE2P模型较大,当显存不够时建议开启
os
.
environ
[
'FLAGS_eager_delete_tensor_gb'
]
=
'0.0'
os
.
environ
[
'FLAGS_eager_delete_tensor_gb'
]
=
'0.0'
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
# 预测数据集类
# 预测数据集类
class
TestDataSet
():
class
TestDataSet
():
def
__init__
(
self
):
def
__init__
(
self
):
...
@@ -40,7 +55,7 @@ class TestDataSet():
...
@@ -40,7 +55,7 @@ class TestDataSet():
def
preprocess
(
self
,
img
):
def
preprocess
(
self
,
img
):
# 图像预处理
# 图像预处理
if
cfg
.
example
==
'ACE2P'
:
if
cfg
.
example
==
'ACE2P'
:
reader
=
importlib
.
import_module
(
args
.
example
+
'.reader'
)
reader
=
importlib
.
import_module
(
args
.
example
+
'.reader'
)
ACE2P_preprocess
=
getattr
(
reader
,
'preprocess'
)
ACE2P_preprocess
=
getattr
(
reader
,
'preprocess'
)
img
=
ACE2P_preprocess
(
img
)
img
=
ACE2P_preprocess
(
img
)
else
:
else
:
...
@@ -56,10 +71,10 @@ class TestDataSet():
...
@@ -56,10 +71,10 @@ class TestDataSet():
img_path
=
self
.
data_list
[
index
]
img_path
=
self
.
data_list
[
index
]
img
=
cv2
.
imread
(
img_path
,
cv2
.
IMREAD_COLOR
)
img
=
cv2
.
imread
(
img_path
,
cv2
.
IMREAD_COLOR
)
if
img
is
None
:
if
img
is
None
:
return
img
,
img
,
img_path
,
None
return
img
,
img
,
img_path
,
None
img_name
=
img_path
.
split
(
os
.
sep
)[
-
1
]
img_name
=
img_path
.
split
(
os
.
sep
)[
-
1
]
name_prefix
=
img_name
.
replace
(
'.'
+
img_name
.
split
(
'.'
)[
-
1
],
''
)
name_prefix
=
img_name
.
replace
(
'.'
+
img_name
.
split
(
'.'
)[
-
1
],
''
)
img_shape
=
img
.
shape
[:
2
]
img_shape
=
img
.
shape
[:
2
]
img_process
=
self
.
preprocess
(
img
)
img_process
=
self
.
preprocess
(
img
)
...
@@ -94,24 +109,29 @@ def infer():
...
@@ -94,24 +109,29 @@ def infer():
# 预测
# 预测
if
cfg
.
example
==
'ACE2P'
:
if
cfg
.
example
==
'ACE2P'
:
# ACE2P模型使用多尺度预测
# ACE2P模型使用多尺度预测
reader
=
importlib
.
import_module
(
args
.
example
+
'.reader'
)
reader
=
importlib
.
import_module
(
args
.
example
+
'.reader'
)
multi_scale_test
=
getattr
(
reader
,
'multi_scale_test'
)
multi_scale_test
=
getattr
(
reader
,
'multi_scale_test'
)
parsing
,
logits
=
multi_scale_test
(
exe
,
test_prog
,
feed_name
,
fetch_list
,
image
,
im_shape
)
parsing
,
logits
=
multi_scale_test
(
exe
,
test_prog
,
feed_name
,
fetch_list
,
image
,
im_shape
)
else
:
else
:
# HumanSeg,RoadLine模型单尺度预测
# HumanSeg,RoadLine模型单尺度预测
result
=
exe
.
run
(
program
=
test_prog
,
feed
=
{
feed_name
[
0
]:
image
},
fetch_list
=
fetch_list
)
result
=
exe
.
run
(
program
=
test_prog
,
feed
=
{
feed_name
[
0
]:
image
},
fetch_list
=
fetch_list
)
parsing
=
np
.
argmax
(
result
[
0
][
0
],
axis
=
0
)
parsing
=
np
.
argmax
(
result
[
0
][
0
],
axis
=
0
)
parsing
=
cv2
.
resize
(
parsing
.
astype
(
np
.
uint8
),
im_shape
[::
-
1
])
parsing
=
cv2
.
resize
(
parsing
.
astype
(
np
.
uint8
),
im_shape
[::
-
1
])
# 预测结果保存
# 预测结果保存
result_path
=
os
.
path
.
join
(
cfg
.
vis_dir
,
im_name
+
'.png'
)
result_path
=
os
.
path
.
join
(
cfg
.
vis_dir
,
im_name
+
'.png'
)
if
cfg
.
example
==
'HumanSeg'
:
if
cfg
.
example
==
'HumanSeg'
:
logits
=
result
[
0
][
0
][
1
]
*
255
logits
=
result
[
0
][
0
][
1
]
*
255
logits
=
cv2
.
resize
(
logits
,
im_shape
[::
-
1
])
logits
=
cv2
.
resize
(
logits
,
im_shape
[::
-
1
])
ret
,
logits
=
cv2
.
threshold
(
logits
,
thresh
,
0
,
cv2
.
THRESH_TOZERO
)
ret
,
logits
=
cv2
.
threshold
(
logits
,
thresh
,
0
,
cv2
.
THRESH_TOZERO
)
logits
=
255
*
(
logits
-
thresh
)
/
(
255
-
thresh
)
logits
=
255
*
(
logits
-
thresh
)
/
(
255
-
thresh
)
# 将分割结果添加到alpha通道
# 将分割结果添加到alpha通道
rgba
=
np
.
concatenate
((
ori_img
,
np
.
expand_dims
(
logits
,
axis
=
2
)),
axis
=
2
)
rgba
=
np
.
concatenate
((
ori_img
,
np
.
expand_dims
(
logits
,
axis
=
2
)),
axis
=
2
)
cv2
.
imwrite
(
result_path
,
rgba
)
cv2
.
imwrite
(
result_path
,
rgba
)
else
:
else
:
output_im
=
PILImage
.
fromarray
(
np
.
asarray
(
parsing
,
dtype
=
np
.
uint8
))
output_im
=
PILImage
.
fromarray
(
np
.
asarray
(
parsing
,
dtype
=
np
.
uint8
))
...
...
contrib/RoadLine/utils/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
contrib/RoadLine/utils/palette.py
浏览文件 @
7835c042
##+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
# coding: utf8
## Created by: RainbowSecret
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
## Microsoft Research
#
## yuyua@microsoft.com
# Licensed under the Apache License, Version 2.0 (the "License");
## Copyright (c) 2018
# you may not use this file except in compliance with the License.
##
# You may obtain a copy of the License at
## This source code is licensed under the MIT-style license found in the
#
## LICENSE file in the root directory of this source tree
# http://www.apache.org/licenses/LICENSE-2.0
##+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
from
__future__
import
print_function
from
__future__
import
print_function
...
...
contrib/RoadLine/utils/util.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
division
from
__future__
import
division
from
__future__
import
print_function
from
__future__
import
print_function
from
__future__
import
unicode_literals
from
__future__
import
unicode_literals
import
argparse
import
argparse
import
os
import
os
def
get_arguments
():
def
get_arguments
():
parser
=
argparse
.
ArgumentParser
()
parser
=
argparse
.
ArgumentParser
()
parser
.
add_argument
(
"--use_gpu"
,
parser
.
add_argument
(
action
=
"store_true"
,
"--use_gpu"
,
action
=
"store_true"
,
help
=
"Use gpu or cpu to test."
)
help
=
"Use gpu or cpu to test."
)
parser
.
add_argument
(
parser
.
add_argument
(
'--example'
,
'--example'
,
type
=
str
,
help
=
'RoadLine, HumanSeg or ACE2P'
)
type
=
str
,
help
=
'RoadLine, HumanSeg or ACE2P'
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
...
@@ -34,6 +48,7 @@ class AttrDict(dict):
...
@@ -34,6 +48,7 @@ class AttrDict(dict):
else
:
else
:
self
[
name
]
=
value
self
[
name
]
=
value
def
merge_cfg_from_args
(
args
,
cfg
):
def
merge_cfg_from_args
(
args
,
cfg
):
"""Merge config keys, values in args into the global config."""
"""Merge config keys, values in args into the global config."""
for
k
,
v
in
vars
(
args
).
items
():
for
k
,
v
in
vars
(
args
).
items
():
...
@@ -44,4 +59,3 @@ def merge_cfg_from_args(args, cfg):
...
@@ -44,4 +59,3 @@ def merge_cfg_from_args(args, cfg):
value
=
v
value
=
v
if
value
is
not
None
:
if
value
is
not
None
:
cfg
[
k
]
=
value
cfg
[
k
]
=
value
dataset/convert_voc2012.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -20,6 +21,8 @@ from PIL import Image
...
@@ -20,6 +21,8 @@ from PIL import Image
import
glob
import
glob
LOCAL_PATH
=
os
.
path
.
dirname
(
os
.
path
.
abspath
(
__file__
))
LOCAL_PATH
=
os
.
path
.
dirname
(
os
.
path
.
abspath
(
__file__
))
def
remove_colormap
(
filename
):
def
remove_colormap
(
filename
):
gray_anno
=
np
.
array
(
Image
.
open
(
filename
))
gray_anno
=
np
.
array
(
Image
.
open
(
filename
))
return
gray_anno
return
gray_anno
...
@@ -30,6 +33,7 @@ def save_annotation(annotation, filename):
...
@@ -30,6 +33,7 @@ def save_annotation(annotation, filename):
annotation
=
Image
.
fromarray
(
annotation
)
annotation
=
Image
.
fromarray
(
annotation
)
annotation
.
save
(
filename
)
annotation
.
save
(
filename
)
def
convert_list
(
origin_file
,
seg_file
,
output_folder
):
def
convert_list
(
origin_file
,
seg_file
,
output_folder
):
with
open
(
seg_file
,
'w'
)
as
fid_seg
:
with
open
(
seg_file
,
'w'
)
as
fid_seg
:
with
open
(
origin_file
)
as
fid_ori
:
with
open
(
origin_file
)
as
fid_ori
:
...
@@ -43,6 +47,7 @@ def convert_list(origin_file, seg_file, output_folder):
...
@@ -43,6 +47,7 @@ def convert_list(origin_file, seg_file, output_folder):
new_line
=
' '
.
join
([
img_name
,
anno_name
])
new_line
=
' '
.
join
([
img_name
,
anno_name
])
fid_seg
.
write
(
new_line
+
"
\n
"
)
fid_seg
.
write
(
new_line
+
"
\n
"
)
if
__name__
==
"__main__"
:
if
__name__
==
"__main__"
:
pascal_root
=
"./VOCtrainval_11-May-2012/VOC2012"
pascal_root
=
"./VOCtrainval_11-May-2012/VOC2012"
pascal_root
=
os
.
path
.
join
(
LOCAL_PATH
,
pascal_root
)
pascal_root
=
os
.
path
.
join
(
LOCAL_PATH
,
pascal_root
)
...
@@ -67,5 +72,5 @@ if __name__ == "__main__":
...
@@ -67,5 +72,5 @@ if __name__ == "__main__":
convert_list
(
train_path
,
train_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
train_path
,
train_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
val_path
,
val_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
val_path
,
val_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
trainval_path
,
trainval_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
trainval_path
,
trainval_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
dataset/download_and_convert_voc2012.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -28,12 +29,12 @@ from convert_voc2012 import remove_colormap
...
@@ -28,12 +29,12 @@ from convert_voc2012 import remove_colormap
from
convert_voc2012
import
save_annotation
from
convert_voc2012
import
save_annotation
def
download_VOC_dataset
(
savepath
,
extrapath
):
def
download_VOC_dataset
(
savepath
,
extrapath
):
url
=
"https://paddleseg.bj.bcebos.com/dataset/VOCtrainval_11-May-2012.tar"
url
=
"https://paddleseg.bj.bcebos.com/dataset/VOCtrainval_11-May-2012.tar"
download_file_and_uncompress
(
download_file_and_uncompress
(
url
=
url
,
savepath
=
savepath
,
extrapath
=
extrapath
)
url
=
url
,
savepath
=
savepath
,
extrapath
=
extrapath
)
if
__name__
==
"__main__"
:
if
__name__
==
"__main__"
:
download_VOC_dataset
(
LOCAL_PATH
,
LOCAL_PATH
)
download_VOC_dataset
(
LOCAL_PATH
,
LOCAL_PATH
)
print
(
"Dataset download finish!"
)
print
(
"Dataset download finish!"
)
...
@@ -61,5 +62,5 @@ if __name__ == "__main__":
...
@@ -61,5 +62,5 @@ if __name__ == "__main__":
convert_list
(
train_path
,
train_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
train_path
,
train_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
val_path
,
val_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
val_path
,
val_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
trainval_path
,
trainval_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
convert_list
(
trainval_path
,
trainval_path
.
replace
(
'txt'
,
'list'
),
output_folder
)
dataset/download_cityscapes.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
dataset/download_mini_deepglobe_road_extraction.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
dataset/download_optic.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
dataset/download_pet.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
deploy/python/README.md
浏览文件 @
7835c042
...
@@ -79,7 +79,7 @@ DEPLOY:
...
@@ -79,7 +79,7 @@ DEPLOY:
### 5.2 执行预测程序
### 5.2 执行预测程序
在终端输入以下命令进行预测:
在终端输入以下命令进行预测:
```
bash
```
bash
python infer.py
--conf
=
/path/to/deploy.yaml
--input_dir
/path/to/images_directory
--use_pr
=
False
python infer.py
--conf
=
/path/to/deploy.yaml
--input_dir
/path/to/images_directory
```
```
参数说明如下:
参数说明如下:
...
@@ -87,9 +87,6 @@ python infer.py --conf=/path/to/deploy.yaml --input_dir/path/to/images_directory
...
@@ -87,9 +87,6 @@ python infer.py --conf=/path/to/deploy.yaml --input_dir/path/to/images_directory
|-------|-------|----------|
|-------|-------|----------|
| conf | Yes|模型配置的Yaml文件路径 |
| conf | Yes|模型配置的Yaml文件路径 |
| input_dir |Yes| 需要预测的图片目录 |
| input_dir |Yes| 需要预测的图片目录 |
| use_pr |No|是否使用优化模型,默认为False|
*
优化模型:使用
`PaddleSeg 0.3.0`
版导出的为优化模型, 此前版本导出的模型即为未优化版本。优化模型把图像的预处理以及后处理部分融入到模型网络中使用
`GPU`
完成,相比原来
`CPU`
中的处理提升了计算性能。
**注意**
: 如果硬件支持且安装的是从源码编译集成
`TensorRT`
的
`PaddlePaddle`
, 则可以使用参数
`--trt_mode=fp16`
表示开启
`FP16`
精度优化, 使用
`trt_mode=fp32`
表示使用
`FP32`
精度。
**注意**
: 如果硬件支持且安装的是从源码编译集成
`TensorRT`
的
`PaddlePaddle`
, 则可以使用参数
`--trt_mode=fp16`
表示开启
`FP16`
精度优化, 使用
`trt_mode=fp32`
表示使用
`FP32`
精度。
...
...
deploy/python/infer.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -29,9 +29,9 @@ from concurrent.futures import ThreadPoolExecutor, as_completed
...
@@ -29,9 +29,9 @@ from concurrent.futures import ThreadPoolExecutor, as_completed
gflags
.
DEFINE_string
(
"conf"
,
default
=
""
,
help
=
"Configuration File Path"
)
gflags
.
DEFINE_string
(
"conf"
,
default
=
""
,
help
=
"Configuration File Path"
)
gflags
.
DEFINE_string
(
"input_dir"
,
default
=
""
,
help
=
"Directory of Input Images"
)
gflags
.
DEFINE_string
(
"input_dir"
,
default
=
""
,
help
=
"Directory of Input Images"
)
gflags
.
DEFINE_boolean
(
"use_pr"
,
default
=
False
,
help
=
"Use optimized model"
)
gflags
.
DEFINE_string
(
"trt_mode"
,
default
=
""
,
help
=
"Use optimized model"
)
gflags
.
DEFINE_string
(
"trt_mode"
,
default
=
""
,
help
=
"Use optimized model"
)
gflags
.
DEFINE_string
(
"ext"
,
default
=
".jpeg|.jpg"
,
help
=
"Input Image File Extensions"
)
gflags
.
DEFINE_string
(
"ext"
,
default
=
".jpeg|.jpg"
,
help
=
"Input Image File Extensions"
)
gflags
.
FLAGS
=
gflags
.
FLAGS
gflags
.
FLAGS
=
gflags
.
FLAGS
...
@@ -103,6 +103,9 @@ class DeployConfig:
...
@@ -103,6 +103,9 @@ class DeployConfig:
self
.
batch_size
=
deploy_conf
[
"BATCH_SIZE"
]
self
.
batch_size
=
deploy_conf
[
"BATCH_SIZE"
]
# 9. channels
# 9. channels
self
.
channels
=
deploy_conf
[
"CHANNELS"
]
self
.
channels
=
deploy_conf
[
"CHANNELS"
]
# 10. use_pr
self
.
use_pr
=
deploy_conf
[
"USE_PR"
]
class
ImageReader
:
class
ImageReader
:
...
@@ -257,23 +260,24 @@ class Predictor:
...
@@ -257,23 +260,24 @@ class Predictor:
# record starting time point
# record starting time point
total_start
=
time
.
time
()
total_start
=
time
.
time
()
batch_size
=
self
.
config
.
batch_size
batch_size
=
self
.
config
.
batch_size
use_pr
=
self
.
config
.
use_pr
for
i
in
range
(
0
,
len
(
images
),
batch_size
):
for
i
in
range
(
0
,
len
(
images
),
batch_size
):
real_batch_size
=
batch_size
real_batch_size
=
batch_size
if
i
+
batch_size
>=
len
(
images
):
if
i
+
batch_size
>=
len
(
images
):
real_batch_size
=
len
(
images
)
-
i
real_batch_size
=
len
(
images
)
-
i
reader_start
=
time
.
time
()
reader_start
=
time
.
time
()
img_datas
=
self
.
image_reader
.
process
(
images
[
i
:
i
+
real_batch_size
],
img_datas
=
self
.
image_reader
.
process
(
images
[
i
:
i
+
real_batch_size
],
gflags
.
FLAGS
.
use_pr
)
use_pr
)
input_data
=
np
.
concatenate
([
item
[
1
]
for
item
in
img_datas
])
input_data
=
np
.
concatenate
([
item
[
1
]
for
item
in
img_datas
])
input_data
=
self
.
create_tensor
(
input_data
=
self
.
create_tensor
(
input_data
,
real_batch_size
,
use_pr
=
gflags
.
FLAGS
.
use_pr
)
input_data
,
real_batch_size
,
use_pr
=
use_pr
)
reader_end
=
time
.
time
()
reader_end
=
time
.
time
()
infer_start
=
time
.
time
()
infer_start
=
time
.
time
()
output_data
=
self
.
predictor
.
run
(
input_data
)[
0
]
output_data
=
self
.
predictor
.
run
(
input_data
)[
0
]
infer_end
=
time
.
time
()
infer_end
=
time
.
time
()
output_data
=
output_data
.
as_ndarray
()
output_data
=
output_data
.
as_ndarray
()
post_start
=
time
.
time
()
post_start
=
time
.
time
()
self
.
output_result
(
img_datas
,
output_data
,
gflags
.
FLAGS
.
use_pr
)
self
.
output_result
(
img_datas
,
output_data
,
use_pr
)
post_end
=
time
.
time
()
post_end
=
time
.
time
()
reader_time
+=
(
reader_end
-
reader_start
)
reader_time
+=
(
reader_end
-
reader_start
)
infer_time
+=
(
infer_end
-
infer_start
)
infer_time
+=
(
infer_end
-
infer_start
)
...
...
docs/annotation/jingling2seg.md
浏览文件 @
7835c042
...
@@ -76,12 +76,6 @@
...
@@ -76,12 +76,6 @@
<p>
图5 格式转换后的数据集目录的结构示意图
</p>
<p>
图5 格式转换后的数据集目录的结构示意图
</p>
</div>
</div>
*
运行转换脚本需要依赖labelme和pillow,如未安装,请先安装。Labelme的具体安装流程请参见
[
官方安装指南
](
https://github.com/wkentaro/labelme
)
。Pillow的安装:
```
shell
pip
install
pillow
```
*
运行以下代码,将标注后的数据转换成满足以上格式的数据集:
*
运行以下代码,将标注后的数据转换成满足以上格式的数据集:
```
```
...
...
docs/annotation/labelme2seg.md
浏览文件 @
7835c042
...
@@ -86,12 +86,6 @@ LableMe产出的真值文件可参考我们给出的文件夹[docs/annotation/la
...
@@ -86,12 +86,6 @@ LableMe产出的真值文件可参考我们给出的文件夹[docs/annotation/la
<p>
图7 格式转换后的数据集目录的结构示意图
</p>
<p>
图7 格式转换后的数据集目录的结构示意图
</p>
</div>
</div>
*
运行转换脚本需要依赖labelme和pillow,如未安装,请先安装。Labelme的具体安装流程请参见
[
官方安装指南
](
https://github.com/wkentaro/labelme
)
。Pillow的安装:
```
shell
pip
install
pillow
```
*
运行以下代码,将标注后的数据转换成满足以上格式的数据集:
*
运行以下代码,将标注后的数据转换成满足以上格式的数据集:
```
```
...
...
docs/annotation/labelme_demo/annotations/2011_000025.png
已删除
100644 → 0
浏览文件 @
7781902e
2.6 KB
pdseg/__init__.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/check.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
absolute_import
from
__future__
import
absolute_import
from
__future__
import
division
from
__future__
import
division
...
@@ -427,12 +440,17 @@ def max_img_size_statistics():
...
@@ -427,12 +440,17 @@ def max_img_size_statistics():
logger
.
info
(
"max width and max height of images are ({},{})"
.
format
(
logger
.
info
(
"max width and max height of images are ({},{})"
.
format
(
max_width
,
max_height
))
max_width
,
max_height
))
def
num_classes_loss_matching_check
():
def
num_classes_loss_matching_check
():
loss_type
=
cfg
.
SOLVER
.
LOSS
loss_type
=
cfg
.
SOLVER
.
LOSS
num_classes
=
cfg
.
DATASET
.
NUM_CLASSES
num_classes
=
cfg
.
DATASET
.
NUM_CLASSES
if
num_classes
>
2
and
((
"dice_loss"
in
loss_type
)
or
(
"bce_loss"
in
loss_type
)):
if
num_classes
>
2
and
((
"dice_loss"
in
loss_type
)
or
logger
.
info
(
error_print
(
"loss check."
(
"bce_loss"
in
loss_type
)):
" Dice loss and bce loss is only applicable to binary classfication"
))
logger
.
info
(
error_print
(
"loss check."
" Dice loss and bce loss is only applicable to binary classfication"
))
else
:
else
:
logger
.
info
(
correct_print
(
"loss check"
))
logger
.
info
(
correct_print
(
"loss check"
))
...
...
pdseg/data_aug.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/data_utils.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
"""
This code is based on https://github.com/fchollet/keras/blob/master/keras/utils/data_utils.py
This code is based on https://github.com/fchollet/keras/blob/master/keras/utils/data_utils.py
"""
"""
...
...
pdseg/eval.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -22,13 +22,9 @@ import os
...
@@ -22,13 +22,9 @@ import os
os
.
environ
[
'FLAGS_eager_delete_tensor_gb'
]
=
"0.0"
os
.
environ
[
'FLAGS_eager_delete_tensor_gb'
]
=
"0.0"
import
sys
import
sys
import
time
import
argparse
import
argparse
import
functools
import
pprint
import
pprint
import
cv2
import
numpy
as
np
import
numpy
as
np
import
paddle
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
from
utils.config
import
cfg
from
utils.config
import
cfg
...
@@ -116,6 +112,9 @@ def evaluate(cfg, ckpt_dir=None, use_gpu=False, use_mpio=False, **kwargs):
...
@@ -116,6 +112,9 @@ def evaluate(cfg, ckpt_dir=None, use_gpu=False, use_mpio=False, **kwargs):
if
ckpt_dir
is
not
None
:
if
ckpt_dir
is
not
None
:
print
(
'load test model:'
,
ckpt_dir
)
print
(
'load test model:'
,
ckpt_dir
)
try
:
fluid
.
load
(
test_prog
,
os
.
path
.
join
(
ckpt_dir
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
# Use streaming confusion matrix to calculate mean_iou
# Use streaming confusion matrix to calculate mean_iou
...
...
pdseg/export_model.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -49,10 +49,11 @@ def parse_args():
...
@@ -49,10 +49,11 @@ def parse_args():
sys
.
exit
(
1
)
sys
.
exit
(
1
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
export_inference_config
():
def
export_inference_config
():
deploy_cfg
=
'''DEPLOY:
deploy_cfg
=
'''DEPLOY:
USE_GPU : 1
USE_GPU : 1
USE_PR :
1
USE_PR :
0
MODEL_PATH : "%s"
MODEL_PATH : "%s"
MODEL_FILENAME : "%s"
MODEL_FILENAME : "%s"
PARAMS_FILENAME : "%s"
PARAMS_FILENAME : "%s"
...
@@ -66,9 +67,8 @@ def export_inference_config():
...
@@ -66,9 +67,8 @@ def export_inference_config():
PREDICTOR_MODE : "ANALYSIS"
PREDICTOR_MODE : "ANALYSIS"
BATCH_SIZE : 1
BATCH_SIZE : 1
'''
%
(
cfg
.
FREEZE
.
SAVE_DIR
,
cfg
.
FREEZE
.
MODEL_FILENAME
,
'''
%
(
cfg
.
FREEZE
.
SAVE_DIR
,
cfg
.
FREEZE
.
MODEL_FILENAME
,
cfg
.
FREEZE
.
PARAMS_FILENAME
,
cfg
.
EVAL_CROP_SIZE
,
cfg
.
FREEZE
.
PARAMS_FILENAME
,
cfg
.
EVAL_CROP_SIZE
,
cfg
.
MEAN
,
cfg
.
STD
,
cfg
.
MEAN
,
cfg
.
STD
,
cfg
.
DATASET
.
IMAGE_TYPE
,
cfg
.
DATASET
.
IMAGE_TYPE
,
cfg
.
DATASET
.
NUM_CLASSES
,
len
(
cfg
.
STD
))
cfg
.
DATASET
.
NUM_CLASSES
,
len
(
cfg
.
STD
))
if
not
os
.
path
.
exists
(
cfg
.
FREEZE
.
SAVE_DIR
):
if
not
os
.
path
.
exists
(
cfg
.
FREEZE
.
SAVE_DIR
):
os
.
mkdir
(
cfg
.
FREEZE
.
SAVE_DIR
)
os
.
mkdir
(
cfg
.
FREEZE
.
SAVE_DIR
)
yaml_path
=
os
.
path
.
join
(
cfg
.
FREEZE
.
SAVE_DIR
,
'deploy.yaml'
)
yaml_path
=
os
.
path
.
join
(
cfg
.
FREEZE
.
SAVE_DIR
,
'deploy.yaml'
)
...
@@ -94,7 +94,13 @@ def export_inference_model(args):
...
@@ -94,7 +94,13 @@ def export_inference_model(args):
infer_prog
=
infer_prog
.
clone
(
for_test
=
True
)
infer_prog
=
infer_prog
.
clone
(
for_test
=
True
)
if
os
.
path
.
exists
(
cfg
.
TEST
.
TEST_MODEL
):
if
os
.
path
.
exists
(
cfg
.
TEST
.
TEST_MODEL
):
fluid
.
io
.
load_params
(
exe
,
cfg
.
TEST
.
TEST_MODEL
,
main_program
=
infer_prog
)
print
(
'load test model:'
,
cfg
.
TEST
.
TEST_MODEL
)
try
:
fluid
.
load
(
infer_prog
,
os
.
path
.
join
(
cfg
.
TEST
.
TEST_MODEL
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
cfg
.
TEST
.
TEST_MODEL
,
main_program
=
infer_prog
)
else
:
else
:
print
(
"TEST.TEST_MODEL diretory is empty!"
)
print
(
"TEST.TEST_MODEL diretory is empty!"
)
exit
(
-
1
)
exit
(
-
1
)
...
...
pdseg/loss.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/lovasz_losses.py
浏览文件 @
7835c042
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/metrics.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/__init__.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/backbone/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
pdseg/models/backbone/mobilenet_v2.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/backbone/resnet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -217,9 +217,9 @@ class ResNet():
...
@@ -217,9 +217,9 @@ class ResNet():
name
=
None
):
name
=
None
):
if
self
.
stem
==
'pspnet'
:
if
self
.
stem
==
'pspnet'
:
bias_attr
=
ParamAttr
(
name
=
name
+
"_biases"
)
bias_attr
=
ParamAttr
(
name
=
name
+
"_biases"
)
else
:
else
:
bias_attr
=
False
bias_attr
=
False
conv
=
fluid
.
layers
.
conv2d
(
conv
=
fluid
.
layers
.
conv2d
(
input
=
input
,
input
=
input
,
...
@@ -238,13 +238,15 @@ class ResNet():
...
@@ -238,13 +238,15 @@ class ResNet():
bn_name
=
"bn_"
+
name
bn_name
=
"bn_"
+
name
else
:
else
:
bn_name
=
"bn"
+
name
[
3
:]
bn_name
=
"bn"
+
name
[
3
:]
return
fluid
.
layers
.
batch_norm
(
input
=
conv
,
return
fluid
.
layers
.
batch_norm
(
input
=
conv
,
act
=
act
,
act
=
act
,
name
=
bn_name
+
'.output.1'
,
name
=
bn_name
+
'.output.1'
,
param_attr
=
ParamAttr
(
name
=
bn_name
+
'_scale'
),
param_attr
=
ParamAttr
(
name
=
bn_name
+
'_scale'
),
bias_attr
=
ParamAttr
(
bn_name
+
'_offset'
),
bias_attr
=
ParamAttr
(
bn_name
+
'_offset'
),
moving_mean_name
=
bn_name
+
'_mean'
,
moving_mean_name
=
bn_name
+
'_mean'
,
moving_variance_name
=
bn_name
+
'_variance'
,
)
moving_variance_name
=
bn_name
+
'_variance'
,
)
def
shortcut
(
self
,
input
,
ch_out
,
stride
,
is_first
,
name
):
def
shortcut
(
self
,
input
,
ch_out
,
stride
,
is_first
,
name
):
ch_in
=
input
.
shape
[
1
]
ch_in
=
input
.
shape
[
1
]
...
...
pdseg/models/backbone/vgg.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -55,7 +55,8 @@ class VGGNet():
...
@@ -55,7 +55,8 @@ class VGGNet():
channels
=
[
64
,
128
,
256
,
512
,
512
]
channels
=
[
64
,
128
,
256
,
512
,
512
]
conv
=
input
conv
=
input
for
i
in
range
(
len
(
nums
)):
for
i
in
range
(
len
(
nums
)):
conv
=
self
.
conv_block
(
conv
,
channels
[
i
],
nums
[
i
],
name
=
"conv"
+
str
(
i
+
1
)
+
"_"
)
conv
=
self
.
conv_block
(
conv
,
channels
[
i
],
nums
[
i
],
name
=
"conv"
+
str
(
i
+
1
)
+
"_"
)
layers_count
+=
nums
[
i
]
layers_count
+=
nums
[
i
]
if
check_points
(
layers_count
,
decode_points
):
if
check_points
(
layers_count
,
decode_points
):
short_cuts
[
layers_count
]
=
conv
short_cuts
[
layers_count
]
=
conv
...
...
pdseg/models/backbone/xception.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/libs/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
pdseg/models/libs/model_libs.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/model_builder.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -111,53 +111,6 @@ def sigmoid_to_softmax(logit):
...
@@ -111,53 +111,6 @@ def sigmoid_to_softmax(logit):
return
logit
return
logit
def
export_preprocess
(
image
):
"""导出模型的预处理流程"""
image
=
fluid
.
layers
.
transpose
(
image
,
[
0
,
3
,
1
,
2
])
origin_shape
=
fluid
.
layers
.
shape
(
image
)[
-
2
:]
# 不同AUG_METHOD方法的resize
if
cfg
.
AUG
.
AUG_METHOD
==
'unpadding'
:
h_fix
=
cfg
.
AUG
.
FIX_RESIZE_SIZE
[
1
]
w_fix
=
cfg
.
AUG
.
FIX_RESIZE_SIZE
[
0
]
image
=
fluid
.
layers
.
resize_bilinear
(
image
,
out_shape
=
[
h_fix
,
w_fix
],
align_corners
=
False
,
align_mode
=
0
)
elif
cfg
.
AUG
.
AUG_METHOD
==
'rangescaling'
:
size
=
cfg
.
AUG
.
INF_RESIZE_VALUE
value
=
fluid
.
layers
.
reduce_max
(
origin_shape
)
scale
=
float
(
size
)
/
value
.
astype
(
'float32'
)
image
=
fluid
.
layers
.
resize_bilinear
(
image
,
scale
=
scale
,
align_corners
=
False
,
align_mode
=
0
)
# 存储resize后图像shape
valid_shape
=
fluid
.
layers
.
shape
(
image
)[
-
2
:]
# padding到eval_crop_size大小
width
=
cfg
.
EVAL_CROP_SIZE
[
0
]
height
=
cfg
.
EVAL_CROP_SIZE
[
1
]
pad_target
=
fluid
.
layers
.
assign
(
np
.
array
([
height
,
width
]).
astype
(
'float32'
))
up
=
fluid
.
layers
.
assign
(
np
.
array
([
0
]).
astype
(
'float32'
))
down
=
pad_target
[
0
]
-
valid_shape
[
0
]
left
=
up
right
=
pad_target
[
1
]
-
valid_shape
[
1
]
paddings
=
fluid
.
layers
.
concat
([
up
,
down
,
left
,
right
])
paddings
=
fluid
.
layers
.
cast
(
paddings
,
'int32'
)
image
=
fluid
.
layers
.
pad2d
(
image
,
paddings
=
paddings
,
pad_value
=
127.5
)
# normalize
mean
=
np
.
array
(
cfg
.
MEAN
).
reshape
(
1
,
len
(
cfg
.
MEAN
),
1
,
1
)
mean
=
fluid
.
layers
.
assign
(
mean
.
astype
(
'float32'
))
std
=
np
.
array
(
cfg
.
STD
).
reshape
(
1
,
len
(
cfg
.
STD
),
1
,
1
)
std
=
fluid
.
layers
.
assign
(
std
.
astype
(
'float32'
))
image
=
(
image
/
255
-
mean
)
/
std
# 使后面的网络能通过类似image.shape获取特征图的shape
image
=
fluid
.
layers
.
reshape
(
image
,
shape
=
[
-
1
,
cfg
.
DATASET
.
DATA_DIM
,
height
,
width
])
return
image
,
valid_shape
,
origin_shape
def
build_model
(
main_prog
,
start_prog
,
phase
=
ModelPhase
.
TRAIN
):
def
build_model
(
main_prog
,
start_prog
,
phase
=
ModelPhase
.
TRAIN
):
if
not
ModelPhase
.
is_valid_phase
(
phase
):
if
not
ModelPhase
.
is_valid_phase
(
phase
):
raise
ValueError
(
"ModelPhase {} is not valid!"
.
format
(
phase
))
raise
ValueError
(
"ModelPhase {} is not valid!"
.
format
(
phase
))
...
@@ -176,21 +129,7 @@ def build_model(main_prog, start_prog, phase=ModelPhase.TRAIN):
...
@@ -176,21 +129,7 @@ def build_model(main_prog, start_prog, phase=ModelPhase.TRAIN):
with
fluid
.
unique_name
.
guard
():
with
fluid
.
unique_name
.
guard
():
# 在导出模型的时候,增加图像标准化预处理,减小预测部署时图像的处理流程
# 在导出模型的时候,增加图像标准化预处理,减小预测部署时图像的处理流程
# 预测部署时只须对输入图像增加batch_size维度即可
# 预测部署时只须对输入图像增加batch_size维度即可
if
ModelPhase
.
is_predict
(
phase
):
image
=
fluid
.
data
(
name
=
'image'
,
shape
=
image_shape
,
dtype
=
'float32'
)
if
cfg
.
SLIM
.
PREPROCESS
:
image
=
fluid
.
data
(
name
=
'image'
,
shape
=
image_shape
,
dtype
=
'float32'
)
else
:
origin_image
=
fluid
.
data
(
name
=
'image'
,
shape
=
[
-
1
,
-
1
,
-
1
,
cfg
.
DATASET
.
DATA_DIM
],
dtype
=
'float32'
)
image
,
valid_shape
,
origin_shape
=
export_preprocess
(
origin_image
)
else
:
image
=
fluid
.
data
(
name
=
'image'
,
shape
=
image_shape
,
dtype
=
'float32'
)
label
=
fluid
.
data
(
name
=
'label'
,
shape
=
grt_shape
,
dtype
=
'int32'
)
label
=
fluid
.
data
(
name
=
'label'
,
shape
=
grt_shape
,
dtype
=
'int32'
)
mask
=
fluid
.
data
(
name
=
'mask'
,
shape
=
grt_shape
,
dtype
=
'int32'
)
mask
=
fluid
.
data
(
name
=
'mask'
,
shape
=
grt_shape
,
dtype
=
'int32'
)
...
@@ -223,6 +162,7 @@ def build_model(main_prog, start_prog, phase=ModelPhase.TRAIN):
...
@@ -223,6 +162,7 @@ def build_model(main_prog, start_prog, phase=ModelPhase.TRAIN):
raise
Exception
(
raise
Exception
(
"softmax loss or lovasz softmax loss can not combine with bce loss or dice loss or lovasz hinge loss."
"softmax loss or lovasz softmax loss can not combine with bce loss or dice loss or lovasz hinge loss."
)
)
cfg
.
PHASE
=
phase
logits
=
seg_model
(
image
,
class_num
)
logits
=
seg_model
(
image
,
class_num
)
# 根据选择的loss函数计算相应的损失函数
# 根据选择的loss函数计算相应的损失函数
...
@@ -292,22 +232,8 @@ def build_model(main_prog, start_prog, phase=ModelPhase.TRAIN):
...
@@ -292,22 +232,8 @@ def build_model(main_prog, start_prog, phase=ModelPhase.TRAIN):
else
:
else
:
logit
=
softmax
(
logit
)
logit
=
softmax
(
logit
)
# 获取有效部分
if
cfg
.
SLIM
.
PREPROCESS
:
return
image
,
logit
return
image
,
logit
else
:
logit
=
fluid
.
layers
.
slice
(
logit
,
axes
=
[
2
,
3
],
starts
=
[
0
,
0
],
ends
=
valid_shape
)
logit
=
fluid
.
layers
.
resize_bilinear
(
logit
,
out_shape
=
origin_shape
,
align_corners
=
False
,
align_mode
=
0
)
logit
=
fluid
.
layers
.
argmax
(
logit
,
axis
=
1
)
return
origin_image
,
logit
if
class_num
==
1
:
if
class_num
==
1
:
out
=
sigmoid_to_softmax
(
logit
)
out
=
sigmoid_to_softmax
(
logit
)
out
=
fluid
.
layers
.
transpose
(
out
,
[
0
,
2
,
3
,
1
])
out
=
fluid
.
layers
.
transpose
(
out
,
[
0
,
2
,
3
,
1
])
...
...
pdseg/models/modeling/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
pdseg/models/modeling/deeplab.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/modeling/fast_scnn.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -25,12 +25,15 @@ from models.libs.model_libs import separate_conv
...
@@ -25,12 +25,15 @@ from models.libs.model_libs import separate_conv
from
utils.config
import
cfg
from
utils.config
import
cfg
def
learning_to_downsample
(
x
,
dw_channels1
=
32
,
dw_channels2
=
48
,
out_channels
=
64
):
def
learning_to_downsample
(
x
,
dw_channels1
=
32
,
dw_channels2
=
48
,
out_channels
=
64
):
x
=
relu
(
bn
(
conv
(
x
,
dw_channels1
,
3
,
2
)))
x
=
relu
(
bn
(
conv
(
x
,
dw_channels1
,
3
,
2
)))
with
scope
(
'dsconv1'
):
with
scope
(
'dsconv1'
):
x
=
separate_conv
(
x
,
dw_channels2
,
stride
=
2
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
x
=
separate_conv
(
x
,
dw_channels2
,
stride
=
2
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
with
scope
(
'dsconv2'
):
with
scope
(
'dsconv2'
):
x
=
separate_conv
(
x
,
out_channels
,
stride
=
2
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
x
=
separate_conv
(
x
,
out_channels
,
stride
=
2
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
return
x
return
x
...
@@ -43,7 +46,9 @@ def dropout2d(input, prob, is_train=False):
...
@@ -43,7 +46,9 @@ def dropout2d(input, prob, is_train=False):
return
input
return
input
channels
=
input
.
shape
[
1
]
channels
=
input
.
shape
[
1
]
keep_prob
=
1.0
-
prob
keep_prob
=
1.0
-
prob
random_tensor
=
keep_prob
+
fluid
.
layers
.
uniform_random_batch_size_like
(
input
,
[
-
1
,
channels
,
1
,
1
],
min
=
0.
,
max
=
1.
)
shape
=
fluid
.
layers
.
shape
(
input
)
random_tensor
=
keep_prob
+
fluid
.
layers
.
uniform_random
(
[
shape
[
0
],
channels
,
1
,
1
],
min
=
0.
,
max
=
1.
)
binary_tensor
=
fluid
.
layers
.
floor
(
random_tensor
)
binary_tensor
=
fluid
.
layers
.
floor
(
random_tensor
)
output
=
input
/
keep_prob
*
binary_tensor
output
=
input
/
keep_prob
*
binary_tensor
return
output
return
output
...
@@ -136,18 +141,23 @@ def psp_module(input, out_features):
...
@@ -136,18 +141,23 @@ def psp_module(input, out_features):
for
size
in
sizes
:
for
size
in
sizes
:
psp_name
=
"psp"
+
str
(
size
)
psp_name
=
"psp"
+
str
(
size
)
with
scope
(
psp_name
):
with
scope
(
psp_name
):
pool
=
fluid
.
layers
.
adaptive_pool2d
(
input
,
pool
=
fluid
.
layers
.
adaptive_pool2d
(
input
,
pool_size
=
[
size
,
size
],
pool_size
=
[
size
,
size
],
pool_type
=
'avg'
,
pool_type
=
'avg'
,
name
=
psp_name
+
'_adapool'
)
name
=
psp_name
+
'_adapool'
)
data
=
conv
(
pool
,
out_features
,
data
=
conv
(
pool
,
out_features
,
filter_size
=
1
,
filter_size
=
1
,
bias_attr
=
False
,
bias_attr
=
False
,
name
=
psp_name
+
'_conv'
)
name
=
psp_name
+
'_conv'
)
data_bn
=
bn
(
data
,
act
=
'relu'
)
data_bn
=
bn
(
data
,
act
=
'relu'
)
interp
=
fluid
.
layers
.
resize_bilinear
(
data_bn
,
interp
=
fluid
.
layers
.
resize_bilinear
(
data_bn
,
out_shape
=
input
.
shape
[
2
:],
out_shape
=
input
.
shape
[
2
:],
name
=
psp_name
+
'_interp'
,
align_mode
=
0
)
name
=
psp_name
+
'_interp'
,
align_mode
=
0
)
cat_layers
.
append
(
interp
)
cat_layers
.
append
(
interp
)
cat_layers
=
[
input
]
+
cat_layers
cat_layers
=
[
input
]
+
cat_layers
out
=
fluid
.
layers
.
concat
(
cat_layers
,
axis
=
1
,
name
=
'psp_cat'
)
out
=
fluid
.
layers
.
concat
(
cat_layers
,
axis
=
1
,
name
=
'psp_cat'
)
...
@@ -158,7 +168,11 @@ def psp_module(input, out_features):
...
@@ -158,7 +168,11 @@ def psp_module(input, out_features):
class
FeatureFusionModule
:
class
FeatureFusionModule
:
"""Feature fusion module"""
"""Feature fusion module"""
def
__init__
(
self
,
higher_in_channels
,
lower_in_channels
,
out_channels
,
scale_factor
=
4
):
def
__init__
(
self
,
higher_in_channels
,
lower_in_channels
,
out_channels
,
scale_factor
=
4
):
self
.
higher_in_channels
=
higher_in_channels
self
.
higher_in_channels
=
higher_in_channels
self
.
lower_in_channels
=
lower_in_channels
self
.
lower_in_channels
=
lower_in_channels
self
.
out_channels
=
out_channels
self
.
out_channels
=
out_channels
...
@@ -166,14 +180,19 @@ class FeatureFusionModule:
...
@@ -166,14 +180,19 @@ class FeatureFusionModule:
def
net
(
self
,
higher_res_feature
,
lower_res_feature
):
def
net
(
self
,
higher_res_feature
,
lower_res_feature
):
h
,
w
=
higher_res_feature
.
shape
[
2
:]
h
,
w
=
higher_res_feature
.
shape
[
2
:]
lower_res_feature
=
fluid
.
layers
.
resize_bilinear
(
lower_res_feature
,
[
h
,
w
],
align_mode
=
0
)
lower_res_feature
=
fluid
.
layers
.
resize_bilinear
(
lower_res_feature
,
[
h
,
w
],
align_mode
=
0
)
with
scope
(
'dwconv'
):
with
scope
(
'dwconv'
):
lower_res_feature
=
relu
(
bn
(
conv
(
lower_res_feature
,
self
.
out_channels
,
1
)))
#(lower_res_feature)
lower_res_feature
=
relu
(
bn
(
conv
(
lower_res_feature
,
self
.
out_channels
,
1
)))
#(lower_res_feature)
with
scope
(
'conv_lower_res'
):
with
scope
(
'conv_lower_res'
):
lower_res_feature
=
bn
(
conv
(
lower_res_feature
,
self
.
out_channels
,
1
,
bias_attr
=
True
))
lower_res_feature
=
bn
(
conv
(
lower_res_feature
,
self
.
out_channels
,
1
,
bias_attr
=
True
))
with
scope
(
'conv_higher_res'
):
with
scope
(
'conv_higher_res'
):
higher_res_feature
=
bn
(
conv
(
higher_res_feature
,
self
.
out_channels
,
1
,
bias_attr
=
True
))
higher_res_feature
=
bn
(
conv
(
higher_res_feature
,
self
.
out_channels
,
1
,
bias_attr
=
True
))
out
=
higher_res_feature
+
lower_res_feature
out
=
higher_res_feature
+
lower_res_feature
return
relu
(
out
)
return
relu
(
out
)
...
@@ -182,8 +201,12 @@ class FeatureFusionModule:
...
@@ -182,8 +201,12 @@ class FeatureFusionModule:
class
GlobalFeatureExtractor
():
class
GlobalFeatureExtractor
():
"""Global feature extractor module"""
"""Global feature extractor module"""
def
__init__
(
self
,
in_channels
=
64
,
block_channels
=
(
64
,
96
,
128
),
out_channels
=
128
,
def
__init__
(
self
,
t
=
6
,
num_blocks
=
(
3
,
3
,
3
)):
in_channels
=
64
,
block_channels
=
(
64
,
96
,
128
),
out_channels
=
128
,
t
=
6
,
num_blocks
=
(
3
,
3
,
3
)):
self
.
in_channels
=
in_channels
self
.
in_channels
=
in_channels
self
.
block_channels
=
block_channels
self
.
block_channels
=
block_channels
self
.
out_channels
=
out_channels
self
.
out_channels
=
out_channels
...
@@ -191,12 +214,15 @@ class GlobalFeatureExtractor():
...
@@ -191,12 +214,15 @@ class GlobalFeatureExtractor():
self
.
num_blocks
=
num_blocks
self
.
num_blocks
=
num_blocks
def
net
(
self
,
x
):
def
net
(
self
,
x
):
x
,
_
=
inverted_blocks
(
x
,
self
.
in_channels
,
self
.
t
,
self
.
block_channels
[
0
],
x
,
_
=
inverted_blocks
(
x
,
self
.
in_channels
,
self
.
t
,
self
.
num_blocks
[
0
],
2
,
'inverted_block_1'
)
self
.
block_channels
[
0
],
self
.
num_blocks
[
0
],
2
,
x
,
_
=
inverted_blocks
(
x
,
self
.
block_channels
[
0
],
self
.
t
,
self
.
block_channels
[
1
],
'inverted_block_1'
)
self
.
num_blocks
[
1
],
2
,
'inverted_block_2'
)
x
,
_
=
inverted_blocks
(
x
,
self
.
block_channels
[
0
],
self
.
t
,
x
,
_
=
inverted_blocks
(
x
,
self
.
block_channels
[
1
],
self
.
t
,
self
.
block_channels
[
2
],
self
.
block_channels
[
1
],
self
.
num_blocks
[
1
],
2
,
self
.
num_blocks
[
2
],
1
,
'inverted_block_3'
)
'inverted_block_2'
)
x
,
_
=
inverted_blocks
(
x
,
self
.
block_channels
[
1
],
self
.
t
,
self
.
block_channels
[
2
],
self
.
num_blocks
[
2
],
1
,
'inverted_block_3'
)
x
=
psp_module
(
x
,
self
.
block_channels
[
2
]
//
4
)
x
=
psp_module
(
x
,
self
.
block_channels
[
2
]
//
4
)
with
scope
(
'out'
):
with
scope
(
'out'
):
x
=
relu
(
bn
(
conv
(
x
,
self
.
out_channels
,
1
)))
x
=
relu
(
bn
(
conv
(
x
,
self
.
out_channels
,
1
)))
...
@@ -213,10 +239,21 @@ class Classifier:
...
@@ -213,10 +239,21 @@ class Classifier:
def
net
(
self
,
x
):
def
net
(
self
,
x
):
with
scope
(
'dsconv1'
):
with
scope
(
'dsconv1'
):
x
=
separate_conv
(
x
,
self
.
dw_channels
,
stride
=
self
.
stride
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
x
=
separate_conv
(
x
,
self
.
dw_channels
,
stride
=
self
.
stride
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
with
scope
(
'dsconv2'
):
with
scope
(
'dsconv2'
):
x
=
separate_conv
(
x
,
self
.
dw_channels
,
stride
=
self
.
stride
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
x
=
separate_conv
(
x
=
dropout2d
(
x
,
0.1
,
is_train
=
cfg
.
PHASE
==
'train'
)
x
,
self
.
dw_channels
,
stride
=
self
.
stride
,
filter
=
3
,
act
=
fluid
.
layers
.
relu
)
x
=
dropout2d
(
x
,
0.1
,
is_train
=
cfg
.
PHASE
==
'train'
)
x
=
conv
(
x
,
self
.
num_classes
,
1
,
bias_attr
=
True
)
x
=
conv
(
x
,
self
.
num_classes
,
1
,
bias_attr
=
True
)
return
x
return
x
...
@@ -233,7 +270,8 @@ def fast_scnn(img, num_classes):
...
@@ -233,7 +270,8 @@ def fast_scnn(img, num_classes):
size
=
img
.
shape
[
2
:]
size
=
img
.
shape
[
2
:]
classifier
=
Classifier
(
128
,
num_classes
)
classifier
=
Classifier
(
128
,
num_classes
)
global_feature_extractor
=
GlobalFeatureExtractor
(
64
,
[
64
,
96
,
128
],
128
,
6
,
[
3
,
3
,
3
])
global_feature_extractor
=
GlobalFeatureExtractor
(
64
,
[
64
,
96
,
128
],
128
,
6
,
[
3
,
3
,
3
])
feature_fusion
=
FeatureFusionModule
(
64
,
128
,
128
)
feature_fusion
=
FeatureFusionModule
(
64
,
128
,
128
)
with
scope
(
'learning_to_downsample'
):
with
scope
(
'learning_to_downsample'
):
...
@@ -249,15 +287,18 @@ def fast_scnn(img, num_classes):
...
@@ -249,15 +287,18 @@ def fast_scnn(img, num_classes):
if
len
(
cfg
.
MODEL
.
MULTI_LOSS_WEIGHT
)
==
3
:
if
len
(
cfg
.
MODEL
.
MULTI_LOSS_WEIGHT
)
==
3
:
with
scope
(
'aux_layer_higher'
):
with
scope
(
'aux_layer_higher'
):
higher_logit
=
aux_layer
(
higher_res_features
,
num_classes
)
higher_logit
=
aux_layer
(
higher_res_features
,
num_classes
)
higher_logit
=
fluid
.
layers
.
resize_bilinear
(
higher_logit
,
size
,
align_mode
=
0
)
higher_logit
=
fluid
.
layers
.
resize_bilinear
(
higher_logit
,
size
,
align_mode
=
0
)
with
scope
(
'aux_layer_lower'
):
with
scope
(
'aux_layer_lower'
):
lower_logit
=
aux_layer
(
lower_res_feature
,
num_classes
)
lower_logit
=
aux_layer
(
lower_res_feature
,
num_classes
)
lower_logit
=
fluid
.
layers
.
resize_bilinear
(
lower_logit
,
size
,
align_mode
=
0
)
lower_logit
=
fluid
.
layers
.
resize_bilinear
(
lower_logit
,
size
,
align_mode
=
0
)
return
logit
,
higher_logit
,
lower_logit
return
logit
,
higher_logit
,
lower_logit
elif
len
(
cfg
.
MODEL
.
MULTI_LOSS_WEIGHT
)
==
2
:
elif
len
(
cfg
.
MODEL
.
MULTI_LOSS_WEIGHT
)
==
2
:
with
scope
(
'aux_layer_higher'
):
with
scope
(
'aux_layer_higher'
):
higher_logit
=
aux_layer
(
higher_res_features
,
num_classes
)
higher_logit
=
aux_layer
(
higher_res_features
,
num_classes
)
higher_logit
=
fluid
.
layers
.
resize_bilinear
(
higher_logit
,
size
,
align_mode
=
0
)
higher_logit
=
fluid
.
layers
.
resize_bilinear
(
higher_logit
,
size
,
align_mode
=
0
)
return
logit
,
higher_logit
return
logit
,
higher_logit
return
logit
return
logit
pdseg/models/modeling/hrnet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -25,7 +25,14 @@ from paddle.fluid.param_attr import ParamAttr
...
@@ -25,7 +25,14 @@ from paddle.fluid.param_attr import ParamAttr
from
utils.config
import
cfg
from
utils.config
import
cfg
def
conv_bn_layer
(
input
,
filter_size
,
num_filters
,
stride
=
1
,
padding
=
1
,
num_groups
=
1
,
if_act
=
True
,
name
=
None
):
def
conv_bn_layer
(
input
,
filter_size
,
num_filters
,
stride
=
1
,
padding
=
1
,
num_groups
=
1
,
if_act
=
True
,
name
=
None
):
conv
=
fluid
.
layers
.
conv2d
(
conv
=
fluid
.
layers
.
conv2d
(
input
=
input
,
input
=
input
,
num_filters
=
num_filters
,
num_filters
=
num_filters
,
...
@@ -37,10 +44,13 @@ def conv_bn_layer(input, filter_size, num_filters, stride=1, padding=1, num_grou
...
@@ -37,10 +44,13 @@ def conv_bn_layer(input, filter_size, num_filters, stride=1, padding=1, num_grou
param_attr
=
ParamAttr
(
initializer
=
MSRA
(),
name
=
name
+
'_weights'
),
param_attr
=
ParamAttr
(
initializer
=
MSRA
(),
name
=
name
+
'_weights'
),
bias_attr
=
False
)
bias_attr
=
False
)
bn_name
=
name
+
'_bn'
bn_name
=
name
+
'_bn'
bn
=
fluid
.
layers
.
batch_norm
(
input
=
conv
,
bn
=
fluid
.
layers
.
batch_norm
(
param_attr
=
ParamAttr
(
name
=
bn_name
+
"_scale"
,
input
=
conv
,
param_attr
=
ParamAttr
(
name
=
bn_name
+
"_scale"
,
initializer
=
fluid
.
initializer
.
Constant
(
1.0
)),
initializer
=
fluid
.
initializer
.
Constant
(
1.0
)),
bias_attr
=
ParamAttr
(
name
=
bn_name
+
"_offset"
,
bias_attr
=
ParamAttr
(
name
=
bn_name
+
"_offset"
,
initializer
=
fluid
.
initializer
.
Constant
(
0.0
)),
initializer
=
fluid
.
initializer
.
Constant
(
0.0
)),
moving_mean_name
=
bn_name
+
'_mean'
,
moving_mean_name
=
bn_name
+
'_mean'
,
moving_variance_name
=
bn_name
+
'_variance'
)
moving_variance_name
=
bn_name
+
'_variance'
)
...
@@ -48,26 +58,60 @@ def conv_bn_layer(input, filter_size, num_filters, stride=1, padding=1, num_grou
...
@@ -48,26 +58,60 @@ def conv_bn_layer(input, filter_size, num_filters, stride=1, padding=1, num_grou
bn
=
fluid
.
layers
.
relu
(
bn
)
bn
=
fluid
.
layers
.
relu
(
bn
)
return
bn
return
bn
def
basic_block
(
input
,
num_filters
,
stride
=
1
,
downsample
=
False
,
name
=
None
):
def
basic_block
(
input
,
num_filters
,
stride
=
1
,
downsample
=
False
,
name
=
None
):
residual
=
input
residual
=
input
conv
=
conv_bn_layer
(
input
=
input
,
filter_size
=
3
,
num_filters
=
num_filters
,
stride
=
stride
,
name
=
name
+
'_conv1'
)
conv
=
conv_bn_layer
(
conv
=
conv_bn_layer
(
input
=
conv
,
filter_size
=
3
,
num_filters
=
num_filters
,
if_act
=
False
,
name
=
name
+
'_conv2'
)
input
=
input
,
filter_size
=
3
,
num_filters
=
num_filters
,
stride
=
stride
,
name
=
name
+
'_conv1'
)
conv
=
conv_bn_layer
(
input
=
conv
,
filter_size
=
3
,
num_filters
=
num_filters
,
if_act
=
False
,
name
=
name
+
'_conv2'
)
if
downsample
:
if
downsample
:
residual
=
conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
,
if_act
=
False
,
residual
=
conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
,
if_act
=
False
,
name
=
name
+
'_downsample'
)
name
=
name
+
'_downsample'
)
return
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
conv
,
act
=
'relu'
)
return
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
conv
,
act
=
'relu'
)
def
bottleneck_block
(
input
,
num_filters
,
stride
=
1
,
downsample
=
False
,
name
=
None
):
def
bottleneck_block
(
input
,
num_filters
,
stride
=
1
,
downsample
=
False
,
name
=
None
):
residual
=
input
residual
=
input
conv
=
conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
,
name
=
name
+
'_conv1'
)
conv
=
conv_bn_layer
(
conv
=
conv_bn_layer
(
input
=
conv
,
filter_size
=
3
,
num_filters
=
num_filters
,
stride
=
stride
,
name
=
name
+
'_conv2'
)
input
=
input
,
conv
=
conv_bn_layer
(
input
=
conv
,
filter_size
=
1
,
num_filters
=
num_filters
*
4
,
if_act
=
False
,
filter_size
=
1
,
num_filters
=
num_filters
,
name
=
name
+
'_conv1'
)
conv
=
conv_bn_layer
(
input
=
conv
,
filter_size
=
3
,
num_filters
=
num_filters
,
stride
=
stride
,
name
=
name
+
'_conv2'
)
conv
=
conv_bn_layer
(
input
=
conv
,
filter_size
=
1
,
num_filters
=
num_filters
*
4
,
if_act
=
False
,
name
=
name
+
'_conv3'
)
name
=
name
+
'_conv3'
)
if
downsample
:
if
downsample
:
residual
=
conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
*
4
,
if_act
=
False
,
residual
=
conv_bn_layer
(
input
=
input
,
filter_size
=
1
,
num_filters
=
num_filters
*
4
,
if_act
=
False
,
name
=
name
+
'_downsample'
)
name
=
name
+
'_downsample'
)
return
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
conv
,
act
=
'relu'
)
return
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
conv
,
act
=
'relu'
)
def
fuse_layers
(
x
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
def
fuse_layers
(
x
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
out
=
[]
out
=
[]
for
i
in
range
(
len
(
channels
)
if
multi_scale_output
else
1
):
for
i
in
range
(
len
(
channels
)
if
multi_scale_output
else
1
):
...
@@ -77,40 +121,64 @@ def fuse_layers(x, channels, multi_scale_output=True, name=None):
...
@@ -77,40 +121,64 @@ def fuse_layers(x, channels, multi_scale_output=True, name=None):
height
=
shape
[
-
2
]
height
=
shape
[
-
2
]
for
j
in
range
(
len
(
channels
)):
for
j
in
range
(
len
(
channels
)):
if
j
>
i
:
if
j
>
i
:
y
=
conv_bn_layer
(
x
[
j
],
filter_size
=
1
,
num_filters
=
channels
[
i
],
if_act
=
False
,
y
=
conv_bn_layer
(
x
[
j
],
filter_size
=
1
,
num_filters
=
channels
[
i
],
if_act
=
False
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
))
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
))
y
=
fluid
.
layers
.
resize_bilinear
(
input
=
y
,
out_shape
=
[
height
,
width
])
y
=
fluid
.
layers
.
resize_bilinear
(
residual
=
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
y
,
act
=
None
)
input
=
y
,
out_shape
=
[
height
,
width
])
residual
=
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
y
,
act
=
None
)
elif
j
<
i
:
elif
j
<
i
:
y
=
x
[
j
]
y
=
x
[
j
]
for
k
in
range
(
i
-
j
):
for
k
in
range
(
i
-
j
):
if
k
==
i
-
j
-
1
:
if
k
==
i
-
j
-
1
:
y
=
conv_bn_layer
(
y
,
filter_size
=
3
,
num_filters
=
channels
[
i
],
stride
=
2
,
if_act
=
False
,
y
=
conv_bn_layer
(
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
)
+
'_'
+
str
(
k
+
1
))
y
,
filter_size
=
3
,
num_filters
=
channels
[
i
],
stride
=
2
,
if_act
=
False
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
)
+
'_'
+
str
(
k
+
1
))
else
:
else
:
y
=
conv_bn_layer
(
y
,
filter_size
=
3
,
num_filters
=
channels
[
j
],
stride
=
2
,
y
=
conv_bn_layer
(
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
)
+
'_'
+
str
(
k
+
1
))
y
,
residual
=
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
y
,
act
=
None
)
filter_size
=
3
,
num_filters
=
channels
[
j
],
stride
=
2
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
)
+
'_'
+
str
(
k
+
1
))
residual
=
fluid
.
layers
.
elementwise_add
(
x
=
residual
,
y
=
y
,
act
=
None
)
residual
=
fluid
.
layers
.
relu
(
residual
)
residual
=
fluid
.
layers
.
relu
(
residual
)
out
.
append
(
residual
)
out
.
append
(
residual
)
return
out
return
out
def
branches
(
x
,
block_num
,
channels
,
name
=
None
):
def
branches
(
x
,
block_num
,
channels
,
name
=
None
):
out
=
[]
out
=
[]
for
i
in
range
(
len
(
channels
)):
for
i
in
range
(
len
(
channels
)):
residual
=
x
[
i
]
residual
=
x
[
i
]
for
j
in
range
(
block_num
):
for
j
in
range
(
block_num
):
residual
=
basic_block
(
residual
,
channels
[
i
],
residual
=
basic_block
(
residual
,
channels
[
i
],
name
=
name
+
'_branch_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
))
name
=
name
+
'_branch_layer_'
+
str
(
i
+
1
)
+
'_'
+
str
(
j
+
1
))
out
.
append
(
residual
)
out
.
append
(
residual
)
return
out
return
out
def
high_resolution_module
(
x
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
def
high_resolution_module
(
x
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
residual
=
branches
(
x
,
4
,
channels
,
name
=
name
)
residual
=
branches
(
x
,
4
,
channels
,
name
=
name
)
out
=
fuse_layers
(
residual
,
channels
,
multi_scale_output
=
multi_scale_output
,
name
=
name
)
out
=
fuse_layers
(
residual
,
channels
,
multi_scale_output
=
multi_scale_output
,
name
=
name
)
return
out
return
out
def
transition_layer
(
x
,
in_channels
,
out_channels
,
name
=
None
):
def
transition_layer
(
x
,
in_channels
,
out_channels
,
name
=
None
):
num_in
=
len
(
in_channels
)
num_in
=
len
(
in_channels
)
num_out
=
len
(
out_channels
)
num_out
=
len
(
out_channels
)
...
@@ -118,34 +186,52 @@ def transition_layer(x, in_channels, out_channels, name=None):
...
@@ -118,34 +186,52 @@ def transition_layer(x, in_channels, out_channels, name=None):
for
i
in
range
(
num_out
):
for
i
in
range
(
num_out
):
if
i
<
num_in
:
if
i
<
num_in
:
if
in_channels
[
i
]
!=
out_channels
[
i
]:
if
in_channels
[
i
]
!=
out_channels
[
i
]:
residual
=
conv_bn_layer
(
x
[
i
],
filter_size
=
3
,
num_filters
=
out_channels
[
i
],
residual
=
conv_bn_layer
(
x
[
i
],
filter_size
=
3
,
num_filters
=
out_channels
[
i
],
name
=
name
+
'_layer_'
+
str
(
i
+
1
))
name
=
name
+
'_layer_'
+
str
(
i
+
1
))
out
.
append
(
residual
)
out
.
append
(
residual
)
else
:
else
:
out
.
append
(
x
[
i
])
out
.
append
(
x
[
i
])
else
:
else
:
residual
=
conv_bn_layer
(
x
[
-
1
],
filter_size
=
3
,
num_filters
=
out_channels
[
i
],
stride
=
2
,
residual
=
conv_bn_layer
(
x
[
-
1
],
filter_size
=
3
,
num_filters
=
out_channels
[
i
],
stride
=
2
,
name
=
name
+
'_layer_'
+
str
(
i
+
1
))
name
=
name
+
'_layer_'
+
str
(
i
+
1
))
out
.
append
(
residual
)
out
.
append
(
residual
)
return
out
return
out
def
stage
(
x
,
num_modules
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
def
stage
(
x
,
num_modules
,
channels
,
multi_scale_output
=
True
,
name
=
None
):
out
=
x
out
=
x
for
i
in
range
(
num_modules
):
for
i
in
range
(
num_modules
):
if
i
==
num_modules
-
1
and
multi_scale_output
==
False
:
if
i
==
num_modules
-
1
and
multi_scale_output
==
False
:
out
=
high_resolution_module
(
out
,
channels
,
multi_scale_output
=
False
,
name
=
name
+
'_'
+
str
(
i
+
1
))
out
=
high_resolution_module
(
out
,
channels
,
multi_scale_output
=
False
,
name
=
name
+
'_'
+
str
(
i
+
1
))
else
:
else
:
out
=
high_resolution_module
(
out
,
channels
,
name
=
name
+
'_'
+
str
(
i
+
1
))
out
=
high_resolution_module
(
out
,
channels
,
name
=
name
+
'_'
+
str
(
i
+
1
))
return
out
return
out
def
layer1
(
input
,
name
=
None
):
def
layer1
(
input
,
name
=
None
):
conv
=
input
conv
=
input
for
i
in
range
(
4
):
for
i
in
range
(
4
):
conv
=
bottleneck_block
(
conv
,
num_filters
=
64
,
downsample
=
True
if
i
==
0
else
False
,
conv
=
bottleneck_block
(
conv
,
num_filters
=
64
,
downsample
=
True
if
i
==
0
else
False
,
name
=
name
+
'_'
+
str
(
i
+
1
))
name
=
name
+
'_'
+
str
(
i
+
1
))
return
conv
return
conv
def
high_resolution_net
(
input
,
num_classes
):
def
high_resolution_net
(
input
,
num_classes
):
channels_2
=
cfg
.
MODEL
.
HRNET
.
STAGE2
.
NUM_CHANNELS
channels_2
=
cfg
.
MODEL
.
HRNET
.
STAGE2
.
NUM_CHANNELS
...
@@ -156,8 +242,20 @@ def high_resolution_net(input, num_classes):
...
@@ -156,8 +242,20 @@ def high_resolution_net(input, num_classes):
num_modules_3
=
cfg
.
MODEL
.
HRNET
.
STAGE3
.
NUM_MODULES
num_modules_3
=
cfg
.
MODEL
.
HRNET
.
STAGE3
.
NUM_MODULES
num_modules_4
=
cfg
.
MODEL
.
HRNET
.
STAGE4
.
NUM_MODULES
num_modules_4
=
cfg
.
MODEL
.
HRNET
.
STAGE4
.
NUM_MODULES
x
=
conv_bn_layer
(
input
=
input
,
filter_size
=
3
,
num_filters
=
64
,
stride
=
2
,
if_act
=
True
,
name
=
'layer1_1'
)
x
=
conv_bn_layer
(
x
=
conv_bn_layer
(
input
=
x
,
filter_size
=
3
,
num_filters
=
64
,
stride
=
2
,
if_act
=
True
,
name
=
'layer1_2'
)
input
=
input
,
filter_size
=
3
,
num_filters
=
64
,
stride
=
2
,
if_act
=
True
,
name
=
'layer1_1'
)
x
=
conv_bn_layer
(
input
=
x
,
filter_size
=
3
,
num_filters
=
64
,
stride
=
2
,
if_act
=
True
,
name
=
'layer1_2'
)
la1
=
layer1
(
x
,
name
=
'layer2'
)
la1
=
layer1
(
x
,
name
=
'layer2'
)
tr1
=
transition_layer
([
la1
],
[
256
],
channels_2
,
name
=
'tr1'
)
tr1
=
transition_layer
([
la1
],
[
256
],
channels_2
,
name
=
'tr1'
)
...
@@ -170,18 +268,21 @@ def high_resolution_net(input, num_classes):
...
@@ -170,18 +268,21 @@ def high_resolution_net(input, num_classes):
# upsample
# upsample
shape
=
st4
[
0
].
shape
shape
=
st4
[
0
].
shape
height
,
width
=
shape
[
-
2
],
shape
[
-
1
]
height
,
width
=
shape
[
-
2
],
shape
[
-
1
]
st4
[
1
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
1
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
1
],
out_shape
=
[
height
,
width
])
st4
[
1
],
out_shape
=
[
height
,
width
])
st4
[
2
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
2
],
out_shape
=
[
height
,
width
])
st4
[
2
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
3
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
3
],
out_shape
=
[
height
,
width
])
st4
[
2
],
out_shape
=
[
height
,
width
])
st4
[
3
]
=
fluid
.
layers
.
resize_bilinear
(
st4
[
3
],
out_shape
=
[
height
,
width
])
out
=
fluid
.
layers
.
concat
(
st4
,
axis
=
1
)
out
=
fluid
.
layers
.
concat
(
st4
,
axis
=
1
)
last_channels
=
sum
(
channels_4
)
last_channels
=
sum
(
channels_4
)
out
=
conv_bn_layer
(
input
=
out
,
filter_size
=
1
,
num_filters
=
last_channels
,
stride
=
1
,
if_act
=
True
,
name
=
'conv-2'
)
out
=
conv_bn_layer
(
out
=
fluid
.
layers
.
conv2d
(
input
=
out
,
filter_size
=
1
,
num_filters
=
last_channels
,
stride
=
1
,
if_act
=
True
,
name
=
'conv-2'
)
out
=
fluid
.
layers
.
conv2d
(
input
=
out
,
input
=
out
,
num_filters
=
num_classes
,
num_filters
=
num_classes
,
filter_size
=
1
,
filter_size
=
1
,
...
@@ -193,7 +294,6 @@ def high_resolution_net(input, num_classes):
...
@@ -193,7 +294,6 @@ def high_resolution_net(input, num_classes):
out
=
fluid
.
layers
.
resize_bilinear
(
out
,
input
.
shape
[
2
:])
out
=
fluid
.
layers
.
resize_bilinear
(
out
,
input
.
shape
[
2
:])
return
out
return
out
...
@@ -201,6 +301,7 @@ def hrnet(input, num_classes):
...
@@ -201,6 +301,7 @@ def hrnet(input, num_classes):
logit
=
high_resolution_net
(
input
,
num_classes
)
logit
=
high_resolution_net
(
input
,
num_classes
)
return
logit
return
logit
if
__name__
==
'__main__'
:
if
__name__
==
'__main__'
:
image_shape
=
[
-
1
,
3
,
769
,
769
]
image_shape
=
[
-
1
,
3
,
769
,
769
]
image
=
fluid
.
data
(
name
=
'image'
,
shape
=
image_shape
,
dtype
=
'float32'
)
image
=
fluid
.
data
(
name
=
'image'
,
shape
=
image_shape
,
dtype
=
'float32'
)
...
...
pdseg/models/modeling/icnet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/models/modeling/pspnet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -24,6 +24,7 @@ from models.libs.model_libs import avg_pool, conv, bn
...
@@ -24,6 +24,7 @@ from models.libs.model_libs import avg_pool, conv, bn
from
models.backbone.resnet
import
ResNet
as
resnet_backbone
from
models.backbone.resnet
import
ResNet
as
resnet_backbone
from
utils.config
import
cfg
from
utils.config
import
cfg
def
get_logit_interp
(
input
,
num_classes
,
out_shape
,
name
=
"logit"
):
def
get_logit_interp
(
input
,
num_classes
,
out_shape
,
name
=
"logit"
):
# 根据类别数决定最后一层卷积输出, 并插值回原始尺寸
# 根据类别数决定最后一层卷积输出, 并插值回原始尺寸
param_attr
=
fluid
.
ParamAttr
(
param_attr
=
fluid
.
ParamAttr
(
...
@@ -33,16 +34,15 @@ def get_logit_interp(input, num_classes, out_shape, name="logit"):
...
@@ -33,16 +34,15 @@ def get_logit_interp(input, num_classes, out_shape, name="logit"):
initializer
=
fluid
.
initializer
.
TruncatedNormal
(
loc
=
0.0
,
scale
=
0.01
))
initializer
=
fluid
.
initializer
.
TruncatedNormal
(
loc
=
0.0
,
scale
=
0.01
))
with
scope
(
name
):
with
scope
(
name
):
logit
=
conv
(
input
,
logit
=
conv
(
input
,
num_classes
,
num_classes
,
filter_size
=
1
,
filter_size
=
1
,
param_attr
=
param_attr
,
param_attr
=
param_attr
,
bias_attr
=
True
,
bias_attr
=
True
,
name
=
name
+
'_conv'
)
name
=
name
+
'_conv'
)
logit_interp
=
fluid
.
layers
.
resize_bilinear
(
logit_interp
=
fluid
.
layers
.
resize_bilinear
(
logit
,
logit
,
out_shape
=
out_shape
,
name
=
name
+
'_interp'
)
out_shape
=
out_shape
,
name
=
name
+
'_interp'
)
return
logit_interp
return
logit_interp
...
@@ -53,29 +53,32 @@ def psp_module(input, out_features):
...
@@ -53,29 +53,32 @@ def psp_module(input, out_features):
# 最后进行一个卷积及BN操作
# 最后进行一个卷积及BN操作
cat_layers
=
[]
cat_layers
=
[]
sizes
=
(
1
,
2
,
3
,
6
)
sizes
=
(
1
,
2
,
3
,
6
)
for
size
in
sizes
:
for
size
in
sizes
:
psp_name
=
"psp"
+
str
(
size
)
psp_name
=
"psp"
+
str
(
size
)
with
scope
(
psp_name
):
with
scope
(
psp_name
):
pool
=
fluid
.
layers
.
adaptive_pool2d
(
input
,
pool
=
fluid
.
layers
.
adaptive_pool2d
(
input
,
pool_size
=
[
size
,
size
],
pool_size
=
[
size
,
size
],
pool_type
=
'avg'
,
pool_type
=
'avg'
,
name
=
psp_name
+
'_adapool'
)
name
=
psp_name
+
'_adapool'
)
data
=
conv
(
pool
,
out_features
,
data
=
conv
(
pool
,
out_features
,
filter_size
=
1
,
filter_size
=
1
,
bias_attr
=
True
,
bias_attr
=
True
,
name
=
psp_name
+
'_conv'
)
name
=
psp_name
+
'_conv'
)
data_bn
=
bn
(
data
,
act
=
'relu'
)
data_bn
=
bn
(
data
,
act
=
'relu'
)
interp
=
fluid
.
layers
.
resize_bilinear
(
data_bn
,
interp
=
fluid
.
layers
.
resize_bilinear
(
out_shape
=
input
.
shape
[
2
:],
data_bn
,
out_shape
=
input
.
shape
[
2
:],
name
=
psp_name
+
'_interp'
)
name
=
psp_name
+
'_interp'
)
cat_layers
.
append
(
interp
)
cat_layers
.
append
(
interp
)
cat_layers
=
[
input
]
+
cat_layers
[::
-
1
]
cat_layers
=
[
input
]
+
cat_layers
[::
-
1
]
cat
=
fluid
.
layers
.
concat
(
cat_layers
,
axis
=
1
,
name
=
'psp_cat'
)
cat
=
fluid
.
layers
.
concat
(
cat_layers
,
axis
=
1
,
name
=
'psp_cat'
)
psp_end_name
=
"psp_end"
psp_end_name
=
"psp_end"
with
scope
(
psp_end_name
):
with
scope
(
psp_end_name
):
data
=
conv
(
cat
,
data
=
conv
(
cat
,
out_features
,
out_features
,
filter_size
=
3
,
filter_size
=
3
,
padding
=
1
,
padding
=
1
,
...
@@ -85,6 +88,7 @@ def psp_module(input, out_features):
...
@@ -85,6 +88,7 @@ def psp_module(input, out_features):
return
out
return
out
def
resnet
(
input
):
def
resnet
(
input
):
# PSPNET backbone: resnet, 默认resnet50
# PSPNET backbone: resnet, 默认resnet50
# end_points: resnet终止层数
# end_points: resnet终止层数
...
@@ -92,14 +96,14 @@ def resnet(input):
...
@@ -92,14 +96,14 @@ def resnet(input):
scale
=
cfg
.
MODEL
.
PSPNET
.
DEPTH_MULTIPLIER
scale
=
cfg
.
MODEL
.
PSPNET
.
DEPTH_MULTIPLIER
layers
=
cfg
.
MODEL
.
PSPNET
.
LAYERS
layers
=
cfg
.
MODEL
.
PSPNET
.
LAYERS
end_points
=
layers
-
1
end_points
=
layers
-
1
dilation_dict
=
{
2
:
2
,
3
:
4
}
dilation_dict
=
{
2
:
2
,
3
:
4
}
model
=
resnet_backbone
(
layers
,
scale
,
stem
=
'pspnet'
)
model
=
resnet_backbone
(
layers
,
scale
,
stem
=
'pspnet'
)
data
,
_
=
model
.
net
(
input
,
data
,
_
=
model
.
net
(
end_points
=
end_points
,
input
,
end_points
=
end_points
,
dilation_dict
=
dilation_dict
)
dilation_dict
=
dilation_dict
)
return
data
return
data
def
pspnet
(
input
,
num_classes
):
def
pspnet
(
input
,
num_classes
):
# Backbone: ResNet
# Backbone: ResNet
res
=
resnet
(
input
)
res
=
resnet
(
input
)
...
@@ -109,4 +113,3 @@ def pspnet(input, num_classes):
...
@@ -109,4 +113,3 @@ def pspnet(input, num_classes):
# 根据类别数决定最后一层卷积输出, 并插值回原始尺寸
# 根据类别数决定最后一层卷积输出, 并插值回原始尺寸
logit
=
get_logit_interp
(
dropout
,
num_classes
,
input
.
shape
[
2
:])
logit
=
get_logit_interp
(
dropout
,
num_classes
,
input
.
shape
[
2
:])
return
logit
return
logit
pdseg/models/modeling/unet.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/reader.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -71,7 +71,8 @@ class SegDataset(object):
...
@@ -71,7 +71,8 @@ class SegDataset(object):
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
num_lines
=
len
(
self
.
all_lines
)
//
cfg
.
NUM_TRAINERS
num_lines
=
len
(
self
.
all_lines
)
//
cfg
.
NUM_TRAINERS
self
.
lines
=
self
.
all_lines
[
num_lines
*
cfg
.
TRAINER_ID
:
num_lines
*
(
cfg
.
TRAINER_ID
+
1
)]
self
.
lines
=
self
.
all_lines
[
num_lines
*
cfg
.
TRAINER_ID
:
num_lines
*
(
cfg
.
TRAINER_ID
+
1
)]
self
.
shuffle_seed
+=
1
self
.
shuffle_seed
+=
1
elif
self
.
shuffle
:
elif
self
.
shuffle
:
np
.
random
.
shuffle
(
self
.
lines
)
np
.
random
.
shuffle
(
self
.
lines
)
...
@@ -99,7 +100,8 @@ class SegDataset(object):
...
@@ -99,7 +100,8 @@ class SegDataset(object):
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
if
self
.
shuffle
and
cfg
.
NUM_TRAINERS
>
1
:
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
np
.
random
.
RandomState
(
self
.
shuffle_seed
).
shuffle
(
self
.
all_lines
)
num_lines
=
len
(
self
.
all_lines
)
//
cfg
.
NUM_TRAINERS
num_lines
=
len
(
self
.
all_lines
)
//
cfg
.
NUM_TRAINERS
self
.
lines
=
self
.
all_lines
[
num_lines
*
cfg
.
TRAINER_ID
:
num_lines
*
(
cfg
.
TRAINER_ID
+
1
)]
self
.
lines
=
self
.
all_lines
[
num_lines
*
cfg
.
TRAINER_ID
:
num_lines
*
(
cfg
.
TRAINER_ID
+
1
)]
self
.
shuffle_seed
+=
1
self
.
shuffle_seed
+=
1
elif
self
.
shuffle
:
elif
self
.
shuffle
:
np
.
random
.
shuffle
(
self
.
lines
)
np
.
random
.
shuffle
(
self
.
lines
)
...
...
pdseg/solver.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/tools/__init__.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
pdseg/tools/create_dataset_list.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -21,55 +21,48 @@ import warnings
...
@@ -21,55 +21,48 @@ import warnings
def
parse_args
():
def
parse_args
():
parser
=
argparse
.
ArgumentParser
(
parser
=
argparse
.
ArgumentParser
(
description
=
'PaddleSeg generate file list on cityscapes or your customized dataset.'
)
description
=
parser
.
add_argument
(
'PaddleSeg generate file list on cityscapes or your customized dataset.'
'dataset_root'
,
help
=
'dataset root directory'
,
type
=
str
)
)
parser
.
add_argument
(
'dataset_root'
,
help
=
'dataset root directory'
,
type
=
str
)
parser
.
add_argument
(
parser
.
add_argument
(
'--type'
,
'--type'
,
help
=
'dataset type:
\n
'
help
=
'dataset type:
\n
'
'- cityscapes
\n
'
'- cityscapes
\n
'
'- custom(default)'
,
'- custom(default)'
,
default
=
"custom"
,
default
=
"custom"
,
type
=
str
type
=
str
)
)
parser
.
add_argument
(
parser
.
add_argument
(
'--separator'
,
'--separator'
,
dest
=
'separator'
,
dest
=
'separator'
,
help
=
'file list separator'
,
help
=
'file list separator'
,
default
=
"|"
,
default
=
"|"
,
type
=
str
type
=
str
)
)
parser
.
add_argument
(
parser
.
add_argument
(
'--folder'
,
'--folder'
,
help
=
'the folder names of images and labels'
,
help
=
'the folder names of images and labels'
,
type
=
str
,
type
=
str
,
nargs
=
2
,
nargs
=
2
,
default
=
[
'images'
,
'annotations'
]
default
=
[
'images'
,
'annotations'
])
)
parser
.
add_argument
(
parser
.
add_argument
(
'--second_folder'
,
'--second_folder'
,
help
=
'the second-level folder names of train set, validation set, test set'
,
help
=
'the second-level folder names of train set, validation set, test set'
,
type
=
str
,
type
=
str
,
nargs
=
'*'
,
nargs
=
'*'
,
default
=
[
'train'
,
'val'
,
'test'
]
default
=
[
'train'
,
'val'
,
'test'
])
)
parser
.
add_argument
(
parser
.
add_argument
(
'--format'
,
'--format'
,
help
=
'data format of images and labels, e.g. jpg or png.'
,
help
=
'data format of images and labels, e.g. jpg or png.'
,
type
=
str
,
type
=
str
,
nargs
=
2
,
nargs
=
2
,
default
=
[
'jpg'
,
'png'
]
default
=
[
'jpg'
,
'png'
])
)
parser
.
add_argument
(
parser
.
add_argument
(
'--postfix'
,
'--postfix'
,
help
=
'postfix of images or labels'
,
help
=
'postfix of images or labels'
,
type
=
str
,
type
=
str
,
nargs
=
2
,
nargs
=
2
,
default
=
[
''
,
''
]
default
=
[
''
,
''
])
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
...
@@ -120,12 +113,14 @@ def generate_list(args):
...
@@ -120,12 +113,14 @@ def generate_list(args):
num_images
=
len
(
image_files
)
num_images
=
len
(
image_files
)
if
not
label_files
:
if
not
label_files
:
label_dir
=
os
.
path
.
join
(
dataset_root
,
args
.
folder
[
1
],
dataset_split
)
label_dir
=
os
.
path
.
join
(
dataset_root
,
args
.
folder
[
1
],
dataset_split
)
warnings
.
warn
(
"No labels in {} !!!"
.
format
(
label_dir
))
warnings
.
warn
(
"No labels in {} !!!"
.
format
(
label_dir
))
num_label
=
len
(
label_files
)
num_label
=
len
(
label_files
)
if
num_images
!=
num_label
and
num_label
>
0
:
if
num_images
!=
num_label
and
num_label
>
0
:
raise
Exception
(
"Number of images = {} number of labels = {}
\n
"
raise
Exception
(
"Number of images = {} number of labels = {}
\n
"
"Either number of images is equal to number of labels, "
"Either number of images is equal to number of labels, "
"or number of labels is equal to 0.
\n
"
"or number of labels is equal to 0.
\n
"
"Please check your dataset!"
.
format
(
num_images
,
num_label
))
"Please check your dataset!"
.
format
(
num_images
,
num_label
))
...
...
pdseg/tools/gray2pseudo_color.py
浏览文件 @
7835c042
# -*- coding: utf-8 -*-
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
print_function
from
__future__
import
print_function
import
argparse
import
argparse
...
@@ -11,16 +25,12 @@ from PIL import Image
...
@@ -11,16 +25,12 @@ from PIL import Image
def
parse_args
():
def
parse_args
():
parser
=
argparse
.
ArgumentParser
(
parser
=
argparse
.
ArgumentParser
(
formatter_class
=
argparse
.
ArgumentDefaultsHelpFormatter
formatter_class
=
argparse
.
ArgumentDefaultsHelpFormatter
)
)
parser
.
add_argument
(
parser
.
add_argument
(
'dir_or_file'
,
'dir_or_file'
,
help
=
'input gray label directory or file list path'
)
help
=
'input gray label directory or file list path'
)
parser
.
add_argument
(
'output_dir'
,
help
=
'output colorful label directory'
)
parser
.
add_argument
(
'output_dir'
,
parser
.
add_argument
(
'--dataset_dir'
,
help
=
'dataset directory'
)
help
=
'output colorful label directory'
)
parser
.
add_argument
(
'--file_separator'
,
help
=
'file list separator'
)
parser
.
add_argument
(
'--dataset_dir'
,
help
=
'dataset directory'
)
parser
.
add_argument
(
'--file_separator'
,
help
=
'file list separator'
)
return
parser
.
parse_args
()
return
parser
.
parse_args
()
...
...
pdseg/tools/jingling2seg.py
浏览文件 @
7835c042
#!/usr/bin/env python
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
print_function
from
__future__
import
print_function
...
@@ -7,12 +20,11 @@ import glob
...
@@ -7,12 +20,11 @@ import glob
import
json
import
json
import
os
import
os
import
os.path
as
osp
import
os.path
as
osp
import
numpy
as
np
import
numpy
as
np
import
PIL.Image
import
PIL.Image
import
labelme
from
gray2pseudo_color
import
get_color_map_list
from
gray2pseudo_color
import
get_color_map_list
from
labelme2seg
import
shape2label
def
parse_args
():
def
parse_args
():
...
@@ -89,10 +101,10 @@ def main(args):
...
@@ -89,10 +101,10 @@ def main(args):
img_shape
=
(
data_size
[
'height'
],
data_size
[
'width'
],
img_shape
=
(
data_size
[
'height'
],
data_size
[
'width'
],
data_size
[
'depth'
])
data_size
[
'depth'
])
lbl
=
labelme
.
utils
.
shapes_to_
label
(
lbl
=
shape2
label
(
img_s
hap
e
=
img_shape
,
img_s
iz
e
=
img_shape
,
shapes
=
data_shapes
,
shapes
=
data_shapes
,
label_name_to_value
=
class_name_to_id
,
class_name_mapping
=
class_name_to_id
,
)
)
if
osp
.
splitext
(
out_png_file
)[
1
]
!=
'.png'
:
if
osp
.
splitext
(
out_png_file
)[
1
]
!=
'.png'
:
...
...
pdseg/tools/labelme2seg.py
浏览文件 @
7835c042
#!/usr/bin/env python
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from
__future__
import
print_function
from
__future__
import
print_function
import
argparse
import
argparse
import
glob
import
glob
import
math
import
json
import
json
import
os
import
os
import
os.path
as
osp
import
os.path
as
osp
import
numpy
as
np
import
numpy
as
np
import
PIL.Image
import
PIL.Image
import
labelme
import
PIL.ImageDraw
import
cv2
from
gray2pseudo_color
import
get_color_map_list
from
gray2pseudo_color
import
get_color_map_list
...
@@ -64,12 +78,12 @@ def main(args):
...
@@ -64,12 +78,12 @@ def main(args):
data
=
json
.
load
(
f
)
data
=
json
.
load
(
f
)
img_file
=
osp
.
join
(
osp
.
dirname
(
label_file
),
data
[
'imagePath'
])
img_file
=
osp
.
join
(
osp
.
dirname
(
label_file
),
data
[
'imagePath'
])
img
=
np
.
asarray
(
PIL
.
Image
.
open
(
img_file
))
img
=
np
.
asarray
(
cv2
.
imread
(
img_file
))
lbl
=
labelme
.
utils
.
shapes_to_
label
(
lbl
=
shape2
label
(
img_s
hap
e
=
img
.
shape
,
img_s
iz
e
=
img
.
shape
,
shapes
=
data
[
'shapes'
],
shapes
=
data
[
'shapes'
],
label_name_to_value
=
class_name_to_id
,
class_name_mapping
=
class_name_to_id
,
)
)
if
osp
.
splitext
(
out_png_file
)[
1
]
!=
'.png'
:
if
osp
.
splitext
(
out_png_file
)[
1
]
!=
'.png'
:
...
@@ -85,6 +99,27 @@ def main(args):
...
@@ -85,6 +99,27 @@ def main(args):
'Please consider using the .npy format.'
%
out_png_file
)
'Please consider using the .npy format.'
%
out_png_file
)
def
shape2mask
(
img_size
,
points
):
label_mask
=
PIL
.
Image
.
fromarray
(
np
.
zeros
(
img_size
[:
2
],
dtype
=
np
.
uint8
))
image_draw
=
PIL
.
ImageDraw
.
Draw
(
label_mask
)
points_list
=
[
tuple
(
point
)
for
point
in
points
]
assert
len
(
points_list
)
>
2
,
'Polygon must have points more than 2'
image_draw
.
polygon
(
xy
=
points_list
,
outline
=
1
,
fill
=
1
)
return
np
.
array
(
label_mask
,
dtype
=
bool
)
def
shape2label
(
img_size
,
shapes
,
class_name_mapping
):
label
=
np
.
zeros
(
img_size
[:
2
],
dtype
=
np
.
int32
)
for
shape
in
shapes
:
points
=
shape
[
'points'
]
class_name
=
shape
[
'label'
]
shape_type
=
shape
.
get
(
'shape_type'
,
None
)
class_id
=
class_name_mapping
[
class_name
]
label_mask
=
shape2mask
(
img_size
[:
2
],
points
)
label
[
label_mask
]
=
class_id
return
label
if
__name__
==
'__main__'
:
if
__name__
==
'__main__'
:
args
=
parse_args
()
args
=
parse_args
()
main
(
args
)
main
(
args
)
pdseg/train.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -26,9 +26,7 @@ import argparse
...
@@ -26,9 +26,7 @@ import argparse
import
pprint
import
pprint
import
random
import
random
import
shutil
import
shutil
import
functools
import
paddle
import
numpy
as
np
import
numpy
as
np
import
paddle.fluid
as
fluid
import
paddle.fluid
as
fluid
from
paddle.fluid
import
profiler
from
paddle.fluid
import
profiler
...
@@ -39,10 +37,10 @@ from metrics import ConfusionMatrix
...
@@ -39,10 +37,10 @@ from metrics import ConfusionMatrix
from
reader
import
SegDataset
from
reader
import
SegDataset
from
models.model_builder
import
build_model
from
models.model_builder
import
build_model
from
models.model_builder
import
ModelPhase
from
models.model_builder
import
ModelPhase
from
models.model_builder
import
parse_shape_from_file
from
eval
import
evaluate
from
eval
import
evaluate
from
vis
import
visualize
from
vis
import
visualize
from
utils
import
dist_utils
from
utils
import
dist_utils
from
utils.load_model_utils
import
load_pretrained_weights
def
parse_args
():
def
parse_args
():
...
@@ -118,38 +116,7 @@ def parse_args():
...
@@ -118,38 +116,7 @@ def parse_args():
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
save_vars
(
executor
,
dirname
,
program
=
None
,
vars
=
None
):
def
save_checkpoint
(
program
,
ckpt_name
):
"""
Temporary resolution for Win save variables compatability.
Will fix in PaddlePaddle v1.5.2
"""
save_program
=
fluid
.
Program
()
save_block
=
save_program
.
global_block
()
for
each_var
in
vars
:
# NOTE: don't save the variable which type is RAW
if
each_var
.
type
==
fluid
.
core
.
VarDesc
.
VarType
.
RAW
:
continue
new_var
=
save_block
.
create_var
(
name
=
each_var
.
name
,
shape
=
each_var
.
shape
,
dtype
=
each_var
.
dtype
,
type
=
each_var
.
type
,
lod_level
=
each_var
.
lod_level
,
persistable
=
True
)
file_path
=
os
.
path
.
join
(
dirname
,
new_var
.
name
)
file_path
=
os
.
path
.
normpath
(
file_path
)
save_block
.
append_op
(
type
=
'save'
,
inputs
=
{
'X'
:
[
new_var
]},
outputs
=
{},
attrs
=
{
'file_path'
:
file_path
})
executor
.
run
(
save_program
)
def
save_checkpoint
(
exe
,
program
,
ckpt_name
):
"""
"""
Save checkpoint for evaluation or resume training
Save checkpoint for evaluation or resume training
"""
"""
...
@@ -158,29 +125,22 @@ def save_checkpoint(exe, program, ckpt_name):
...
@@ -158,29 +125,22 @@ def save_checkpoint(exe, program, ckpt_name):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
os
.
makedirs
(
ckpt_dir
)
os
.
makedirs
(
ckpt_dir
)
save_vars
(
fluid
.
save
(
program
,
os
.
path
.
join
(
ckpt_dir
,
'model'
))
exe
,
ckpt_dir
,
program
,
vars
=
list
(
filter
(
fluid
.
io
.
is_persistable
,
program
.
list_vars
())))
return
ckpt_dir
return
ckpt_dir
def
load_checkpoint
(
exe
,
program
):
def
load_checkpoint
(
exe
,
program
):
"""
"""
Load checkpoiont f
rom pretrained model directory for resume
training
Load checkpoiont f
or resuming
training
"""
"""
print
(
'Resume model training from:'
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
)
if
not
os
.
path
.
exists
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
))
fluid
.
io
.
load_persistables
(
exe
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
,
main_program
=
program
)
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
print
(
'Resume model training from:'
,
model_path
)
if
not
os
.
path
.
exists
(
model_path
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
model_path
))
fluid
.
load
(
program
,
os
.
path
.
join
(
model_path
,
'model'
),
exe
)
# Check is path ended by path spearator
# Check is path ended by path spearator
if
model_path
[
-
1
]
==
os
.
sep
:
if
model_path
[
-
1
]
==
os
.
sep
:
model_path
=
model_path
[
0
:
-
1
]
model_path
=
model_path
[
0
:
-
1
]
...
@@ -195,7 +155,6 @@ def load_checkpoint(exe, program):
...
@@ -195,7 +155,6 @@ def load_checkpoint(exe, program):
else
:
else
:
raise
ValueError
(
"Resume model path is not valid!"
)
raise
ValueError
(
"Resume model path is not valid!"
)
print
(
"Model checkpoint loaded successfully!"
)
print
(
"Model checkpoint loaded successfully!"
)
return
begin_epoch
return
begin_epoch
...
@@ -247,8 +206,6 @@ def train(cfg):
...
@@ -247,8 +206,6 @@ def train(cfg):
yield
item
[
0
],
item
[
1
],
item
[
2
]
yield
item
[
0
],
item
[
1
],
item
[
2
]
# Get device environment
# Get device environment
# places = fluid.cuda_places() if args.use_gpu else fluid.cpu_places()
# place = places[0]
gpu_id
=
int
(
os
.
environ
.
get
(
'FLAGS_selected_gpus'
,
0
))
gpu_id
=
int
(
os
.
environ
.
get
(
'FLAGS_selected_gpus'
,
0
))
place
=
fluid
.
CUDAPlace
(
gpu_id
)
if
args
.
use_gpu
else
fluid
.
CPUPlace
()
place
=
fluid
.
CUDAPlace
(
gpu_id
)
if
args
.
use_gpu
else
fluid
.
CPUPlace
()
places
=
fluid
.
cuda_places
()
if
args
.
use_gpu
else
fluid
.
cpu_places
()
places
=
fluid
.
cuda_places
()
if
args
.
use_gpu
else
fluid
.
cpu_places
()
...
@@ -304,42 +261,7 @@ def train(cfg):
...
@@ -304,42 +261,7 @@ def train(cfg):
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
# Load pretrained model
# Load pretrained model
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
print_info
(
'Pretrained model dir: '
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_pretrained_weights
(
exe
,
train_prog
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_vars
=
[]
load_fail_vars
=
[]
def
var_shape_matched
(
var
,
shape
):
"""
Check whehter persitable variable shape is match with current network
"""
var_exist
=
os
.
path
.
exists
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_exist
:
var_shape
=
parse_shape_from_file
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
return
var_shape
==
shape
return
False
for
x
in
train_prog
.
list_vars
():
if
isinstance
(
x
,
fluid
.
framework
.
Parameter
):
shape
=
tuple
(
fluid
.
global_scope
().
find_var
(
x
.
name
).
get_tensor
().
shape
())
if
var_shape_matched
(
x
,
shape
):
load_vars
.
append
(
x
)
else
:
load_fail_vars
.
append
(
x
)
fluid
.
io
.
load_vars
(
exe
,
dirname
=
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
vars
=
load_vars
)
for
var
in
load_vars
:
print_info
(
"Parameter[{}] loaded sucessfully!"
.
format
(
var
.
name
))
for
var
in
load_fail_vars
:
print_info
(
"Parameter[{}] don't exist or shape does not match current network, skip"
" to load it."
.
format
(
var
.
name
))
print_info
(
"{}/{} pretrained parameters loaded successfully!"
.
format
(
len
(
load_vars
),
len
(
load_vars
)
+
len
(
load_fail_vars
)))
else
:
else
:
print_info
(
print_info
(
'Pretrained model dir {} not exists, training from scratch...'
.
'Pretrained model dir {} not exists, training from scratch...'
.
...
@@ -418,12 +340,9 @@ def train(cfg):
...
@@ -418,12 +340,9 @@ def train(cfg):
step
)
step
)
log_writer
.
add_scalar
(
'Train/mean_acc'
,
mean_acc
,
log_writer
.
add_scalar
(
'Train/mean_acc'
,
mean_acc
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
log_writer
.
add_scalar
(
'Train/step/sec'
,
speed
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/step/sec'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
avg_loss
=
0.0
avg_loss
=
0.0
cm
.
zero_matrix
()
cm
.
zero_matrix
()
...
@@ -445,12 +364,9 @@ def train(cfg):
...
@@ -445,12 +364,9 @@ def train(cfg):
).
format
(
epoch
,
step
,
lr
[
0
],
avg_loss
,
speed
,
).
format
(
epoch
,
step
,
lr
[
0
],
avg_loss
,
speed
,
calculate_eta
(
all_step
-
step
,
speed
)))
calculate_eta
(
all_step
-
step
,
speed
)))
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
avg_loss
=
0.0
avg_loss
=
0.0
timer
.
restart
()
timer
.
restart
()
...
@@ -470,7 +386,7 @@ def train(cfg):
...
@@ -470,7 +386,7 @@ def train(cfg):
if
(
epoch
%
cfg
.
TRAIN
.
SNAPSHOT_EPOCH
==
0
if
(
epoch
%
cfg
.
TRAIN
.
SNAPSHOT_EPOCH
==
0
or
epoch
==
cfg
.
SOLVER
.
NUM_EPOCHS
)
and
cfg
.
TRAINER_ID
==
0
:
or
epoch
==
cfg
.
SOLVER
.
NUM_EPOCHS
)
and
cfg
.
TRAINER_ID
==
0
:
ckpt_dir
=
save_checkpoint
(
exe
,
train_prog
,
epoch
)
ckpt_dir
=
save_checkpoint
(
train_prog
,
epoch
)
if
args
.
do_eval
:
if
args
.
do_eval
:
print
(
"Evaluation start"
)
print
(
"Evaluation start"
)
...
@@ -480,10 +396,8 @@ def train(cfg):
...
@@ -480,10 +396,8 @@ def train(cfg):
use_gpu
=
args
.
use_gpu
,
use_gpu
=
args
.
use_gpu
,
use_mpio
=
args
.
use_mpio
)
use_mpio
=
args
.
use_mpio
)
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Evaluate/mean_iou'
,
mean_iou
,
log_writer
.
add_scalar
(
'Evaluate/mean_iou'
,
mean_iou
,
step
)
step
)
log_writer
.
add_scalar
(
'Evaluate/mean_acc'
,
mean_acc
,
step
)
log_writer
.
add_scalar
(
'Evaluate/mean_acc'
,
mean_acc
,
step
)
if
mean_iou
>
best_mIoU
:
if
mean_iou
>
best_mIoU
:
best_mIoU
=
mean_iou
best_mIoU
=
mean_iou
...
@@ -505,7 +419,7 @@ def train(cfg):
...
@@ -505,7 +419,7 @@ def train(cfg):
# save final model
# save final model
if
cfg
.
TRAINER_ID
==
0
:
if
cfg
.
TRAINER_ID
==
0
:
save_checkpoint
(
exe
,
train_prog
,
'final'
)
save_checkpoint
(
train_prog
,
'final'
)
def
main
(
args
):
def
main
(
args
):
...
...
pdseg/utils/__init__.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
pdseg/utils/collect.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -98,7 +99,7 @@ class SegConfig(dict):
...
@@ -98,7 +99,7 @@ class SegConfig(dict):
'DATASET.IMAGE_TYPE config error, only support `rgb`, `gray` and `rgba`'
'DATASET.IMAGE_TYPE config error, only support `rgb`, `gray` and `rgba`'
)
)
if
self
.
MEAN
is
not
None
:
if
self
.
MEAN
is
not
None
:
self
.
DATASET
.
PADDING_VALUE
=
[
x
*
255.0
for
x
in
self
.
MEAN
]
self
.
DATASET
.
PADDING_VALUE
=
[
x
*
255.0
for
x
in
self
.
MEAN
]
if
not
self
.
TRAIN_CROP_SIZE
:
if
not
self
.
TRAIN_CROP_SIZE
:
raise
ValueError
(
raise
ValueError
(
...
@@ -111,9 +112,12 @@ class SegConfig(dict):
...
@@ -111,9 +112,12 @@ class SegConfig(dict):
)
)
# Ensure file list is use UTF-8 encoding
# Ensure file list is use UTF-8 encoding
train_sets
=
codecs
.
open
(
self
.
DATASET
.
TRAIN_FILE_LIST
,
'r'
,
'utf-8'
).
readlines
()
train_sets
=
codecs
.
open
(
self
.
DATASET
.
TRAIN_FILE_LIST
,
'r'
,
val_sets
=
codecs
.
open
(
self
.
DATASET
.
VAL_FILE_LIST
,
'r'
,
'utf-8'
).
readlines
()
'utf-8'
).
readlines
()
test_sets
=
codecs
.
open
(
self
.
DATASET
.
TEST_FILE_LIST
,
'r'
,
'utf-8'
).
readlines
()
val_sets
=
codecs
.
open
(
self
.
DATASET
.
VAL_FILE_LIST
,
'r'
,
'utf-8'
).
readlines
()
test_sets
=
codecs
.
open
(
self
.
DATASET
.
TEST_FILE_LIST
,
'r'
,
'utf-8'
).
readlines
()
self
.
DATASET
.
TRAIN_TOTAL_IMAGES
=
len
(
train_sets
)
self
.
DATASET
.
TRAIN_TOTAL_IMAGES
=
len
(
train_sets
)
self
.
DATASET
.
VAL_TOTAL_IMAGES
=
len
(
val_sets
)
self
.
DATASET
.
VAL_TOTAL_IMAGES
=
len
(
val_sets
)
self
.
DATASET
.
TEST_TOTAL_IMAGES
=
len
(
test_sets
)
self
.
DATASET
.
TEST_TOTAL_IMAGES
=
len
(
test_sets
)
...
@@ -122,12 +126,13 @@ class SegConfig(dict):
...
@@ -122,12 +126,13 @@ class SegConfig(dict):
len
(
self
.
MODEL
.
MULTI_LOSS_WEIGHT
)
!=
3
:
len
(
self
.
MODEL
.
MULTI_LOSS_WEIGHT
)
!=
3
:
self
.
MODEL
.
MULTI_LOSS_WEIGHT
=
[
1.0
,
0.4
,
0.16
]
self
.
MODEL
.
MULTI_LOSS_WEIGHT
=
[
1.0
,
0.4
,
0.16
]
if
self
.
AUG
.
AUG_METHOD
not
in
[
'unpadding'
,
'stepscaling'
,
'rangescaling'
]:
if
self
.
AUG
.
AUG_METHOD
not
in
[
'unpadding'
,
'stepscaling'
,
'rangescaling'
]:
raise
ValueError
(
raise
ValueError
(
'AUG.AUG_METHOD config error, only support `unpadding`, `unpadding` and `rangescaling`'
'AUG.AUG_METHOD config error, only support `unpadding`, `unpadding` and `rangescaling`'
)
)
def
update_from_list
(
self
,
config_list
):
def
update_from_list
(
self
,
config_list
):
if
len
(
config_list
)
%
2
!=
0
:
if
len
(
config_list
)
%
2
!=
0
:
raise
ValueError
(
raise
ValueError
(
...
...
pdseg/utils/config.py
浏览文件 @
7835c042
#
-*- coding: utf-8 -*-
#
coding: utf8
#
Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved
.
#
Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve
.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
pdseg/utils/dist_utils.py
浏览文件 @
7835c042
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
#Licensed under the Apache License, Version 2.0 (the "License");
#Licensed under the Apache License, Version 2.0 (the "License");
#you may not use this file except in compliance with the License.
#you may not use this file except in compliance with the License.
...
...
pdseg/utils/fp16_utils.py
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os
import
os
from
paddle
import
fluid
from
paddle
import
fluid
def
load_fp16_vars
(
executor
,
dirname
,
program
):
def
load_fp16_vars
(
executor
,
dirname
,
program
):
load_dirname
=
os
.
path
.
normpath
(
dirname
)
load_dirname
=
os
.
path
.
normpath
(
dirname
)
...
...
pdseg/utils/load_model_utils.py
0 → 100644
浏览文件 @
7835c042
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import
os
import
os.path
as
osp
import
six
import
numpy
as
np
def
parse_param_file
(
param_file
,
return_shape
=
True
):
from
paddle.fluid.proto.framework_pb2
import
VarType
f
=
open
(
param_file
,
'rb'
)
version
=
np
.
fromstring
(
f
.
read
(
4
),
dtype
=
'int32'
)
lod_level
=
np
.
fromstring
(
f
.
read
(
8
),
dtype
=
'int64'
)
for
i
in
range
(
int
(
lod_level
)):
_size
=
np
.
fromstring
(
f
.
read
(
8
),
dtype
=
'int64'
)
_
=
f
.
read
(
_size
)
version
=
np
.
fromstring
(
f
.
read
(
4
),
dtype
=
'int32'
)
tensor_desc
=
VarType
.
TensorDesc
()
tensor_desc_size
=
np
.
fromstring
(
f
.
read
(
4
),
dtype
=
'int32'
)
tensor_desc
.
ParseFromString
(
f
.
read
(
int
(
tensor_desc_size
)))
tensor_shape
=
tuple
(
tensor_desc
.
dims
)
if
return_shape
:
f
.
close
()
return
tuple
(
tensor_desc
.
dims
)
if
tensor_desc
.
data_type
!=
5
:
raise
Exception
(
"Unexpected data type while parse {}"
.
format
(
param_file
))
data_size
=
4
for
i
in
range
(
len
(
tensor_shape
)):
data_size
*=
tensor_shape
[
i
]
weight
=
np
.
fromstring
(
f
.
read
(
data_size
),
dtype
=
'float32'
)
f
.
close
()
return
np
.
reshape
(
weight
,
tensor_shape
)
def
load_pdparams
(
exe
,
main_prog
,
model_dir
):
import
paddle.fluid
as
fluid
from
paddle.fluid.proto.framework_pb2
import
VarType
from
paddle.fluid.framework
import
Program
vars_to_load
=
list
()
vars_not_load
=
list
()
import
pickle
with
open
(
osp
.
join
(
model_dir
,
'model.pdparams'
),
'rb'
)
as
f
:
params_dict
=
pickle
.
load
(
f
)
if
six
.
PY2
else
pickle
.
load
(
f
,
encoding
=
'latin1'
)
unused_vars
=
list
()
for
var
in
main_prog
.
list_vars
():
if
not
isinstance
(
var
,
fluid
.
framework
.
Parameter
):
continue
if
var
.
name
not
in
params_dict
:
print
(
"{} is not in saved model"
.
format
(
var
.
name
))
vars_not_load
.
append
(
var
.
name
)
continue
if
var
.
shape
!=
params_dict
[
var
.
name
].
shape
:
unused_vars
.
append
(
var
.
name
)
vars_not_load
.
append
(
var
.
name
)
print
(
"[SKIP] Shape of pretrained weight {} doesn't match.(Pretrained: {}, Actual: {})"
.
format
(
var
.
name
,
params_dict
[
var
.
name
].
shape
,
var
.
shape
))
continue
vars_to_load
.
append
(
var
)
for
var_name
in
unused_vars
:
del
params_dict
[
var_name
]
fluid
.
io
.
set_program_state
(
main_prog
,
params_dict
)
if
len
(
vars_to_load
)
==
0
:
print
(
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
)
else
:
print
(
"There are {}/{} varaibles in {} are loaded."
.
format
(
len
(
vars_to_load
),
len
(
vars_to_load
)
+
len
(
vars_not_load
),
model_dir
))
def
load_pretrained_weights
(
exe
,
main_prog
,
weights_dir
):
if
not
osp
.
exists
(
weights_dir
):
raise
Exception
(
"Path {} not exists."
.
format
(
weights_dir
))
if
osp
.
exists
(
osp
.
join
(
weights_dir
,
"model.pdparams"
)):
return
load_pdparams
(
exe
,
main_prog
,
weights_dir
)
import
paddle.fluid
as
fluid
vars_to_load
=
list
()
vars_not_load
=
list
()
for
var
in
main_prog
.
list_vars
():
if
not
isinstance
(
var
,
fluid
.
framework
.
Parameter
):
continue
if
not
osp
.
exists
(
osp
.
join
(
weights_dir
,
var
.
name
)):
print
(
"[SKIP] Pretrained weight {}/{} doesn't exist"
.
format
(
weights_dir
,
var
.
name
))
vars_not_load
.
append
(
var
)
continue
pretrained_shape
=
parse_param_file
(
osp
.
join
(
weights_dir
,
var
.
name
))
actual_shape
=
tuple
(
var
.
shape
)
if
pretrained_shape
!=
actual_shape
:
print
(
"[SKIP] Shape of pretrained weight {}/{} doesn't match.(Pretrained: {}, Actual: {})"
.
format
(
weights_dir
,
var
.
name
,
pretrained_shape
,
actual_shape
))
vars_not_load
.
append
(
var
)
continue
vars_to_load
.
append
(
var
)
params_dict
=
fluid
.
io
.
load_program_state
(
weights_dir
,
var_list
=
vars_to_load
)
fluid
.
io
.
set_program_state
(
main_prog
,
params_dict
)
if
len
(
vars_to_load
)
==
0
:
print
(
"There is no pretrain weights loaded, maybe you should check you pretrain model!"
)
else
:
print
(
"There are {}/{} varaibles in {} are loaded."
.
format
(
len
(
vars_to_load
),
len
(
vars_to_load
)
+
len
(
vars_not_load
),
weights_dir
))
pdseg/utils/timer.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
pdseg/vis.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -115,6 +115,11 @@ def visualize(cfg,
...
@@ -115,6 +115,11 @@ def visualize(cfg,
ckpt_dir
=
cfg
.
TEST
.
TEST_MODEL
if
not
ckpt_dir
else
ckpt_dir
ckpt_dir
=
cfg
.
TEST
.
TEST_MODEL
if
not
ckpt_dir
else
ckpt_dir
if
ckpt_dir
is
not
None
:
print
(
'load test model:'
,
ckpt_dir
)
try
:
fluid
.
load
(
test_prog
,
os
.
path
.
join
(
ckpt_dir
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
save_dir
=
vis_dir
save_dir
=
vis_dir
...
@@ -169,18 +174,13 @@ def visualize(cfg,
...
@@ -169,18 +174,13 @@ def visualize(cfg,
print
(
"VisualDL visualization epoch"
,
epoch
)
print
(
"VisualDL visualization epoch"
,
epoch
)
pred_mask_np
=
np
.
array
(
pred_mask
.
convert
(
"RGB"
))
pred_mask_np
=
np
.
array
(
pred_mask
.
convert
(
"RGB"
))
log_writer
.
add_image
(
log_writer
.
add_image
(
"Predict/{}"
.
format
(
img_name
),
"Predict/{}"
.
format
(
img_name
),
pred_mask_np
,
epoch
)
pred_mask_np
,
epoch
)
# Original image
# Original image
# BGR->RGB
# BGR->RGB
img
=
cv2
.
imread
(
img
=
cv2
.
imread
(
os
.
path
.
join
(
cfg
.
DATASET
.
DATA_DIR
,
os
.
path
.
join
(
cfg
.
DATASET
.
DATA_DIR
,
img_name
))[...,
::
-
1
]
img_name
))[...,
::
-
1
]
log_writer
.
add_image
(
log_writer
.
add_image
(
"Images/{}"
.
format
(
img_name
),
img
,
epoch
)
"Images/{}"
.
format
(
img_name
),
img
,
epoch
)
# add ground truth (label) images
# add ground truth (label) images
grt
=
grts
[
i
]
grt
=
grts
[
i
]
if
grt
is
not
None
:
if
grt
is
not
None
:
...
@@ -189,9 +189,7 @@ def visualize(cfg,
...
@@ -189,9 +189,7 @@ def visualize(cfg,
grt_pil
.
putpalette
(
color_map
)
grt_pil
.
putpalette
(
color_map
)
grt_pil
=
grt_pil
.
resize
((
org_shape
[
1
],
org_shape
[
0
]))
grt_pil
=
grt_pil
.
resize
((
org_shape
[
1
],
org_shape
[
0
]))
grt
=
np
.
array
(
grt_pil
.
convert
(
"RGB"
))
grt
=
np
.
array
(
grt_pil
.
convert
(
"RGB"
))
log_writer
.
add_image
(
log_writer
.
add_image
(
"Label/{}"
.
format
(
img_name
),
grt
,
"Label/{}"
.
format
(
img_name
),
grt
,
epoch
)
epoch
)
# If in local_test mode, only visualize 5 images just for testing
# If in local_test mode, only visualize 5 images just for testing
...
...
pretrained_model/download_model.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -42,7 +43,7 @@ model_urls = {
...
@@ -42,7 +43,7 @@ model_urls = {
"hrnet_w30_bn_imagenet"
:
"hrnet_w30_bn_imagenet"
:
"https://paddleseg.bj.bcebos.com/models/hrnet_w30_imagenet.tar"
,
"https://paddleseg.bj.bcebos.com/models/hrnet_w30_imagenet.tar"
,
"hrnet_w32_bn_imagenet"
:
"hrnet_w32_bn_imagenet"
:
"https://paddleseg.bj.bcebos.com/models/hrnet_w32_imagenet.tar"
,
"https://paddleseg.bj.bcebos.com/models/hrnet_w32_imagenet.tar"
,
"hrnet_w40_bn_imagenet"
:
"hrnet_w40_bn_imagenet"
:
"https://paddleseg.bj.bcebos.com/models/hrnet_w40_imagenet.tar"
,
"https://paddleseg.bj.bcebos.com/models/hrnet_w40_imagenet.tar"
,
"hrnet_w44_bn_imagenet"
:
"hrnet_w44_bn_imagenet"
:
...
...
slim/distillation/model_builder.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
slim/distillation/train_distill.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -44,6 +44,7 @@ from model_builder import parse_shape_from_file
...
@@ -44,6 +44,7 @@ from model_builder import parse_shape_from_file
from
eval
import
evaluate
from
eval
import
evaluate
from
vis
import
visualize
from
vis
import
visualize
from
utils
import
dist_utils
from
utils
import
dist_utils
from
utils.load_model_utils
import
load_pretrained_weights
import
solver
import
solver
from
paddleslim.dist.single_distiller
import
merge
,
l2_loss
from
paddleslim.dist.single_distiller
import
merge
,
l2_loss
...
@@ -116,38 +117,7 @@ def parse_args():
...
@@ -116,38 +117,7 @@ def parse_args():
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
save_vars
(
executor
,
dirname
,
program
=
None
,
vars
=
None
):
def
save_checkpoint
(
program
,
ckpt_name
):
"""
Temporary resolution for Win save variables compatability.
Will fix in PaddlePaddle v1.5.2
"""
save_program
=
fluid
.
Program
()
save_block
=
save_program
.
global_block
()
for
each_var
in
vars
:
# NOTE: don't save the variable which type is RAW
if
each_var
.
type
==
fluid
.
core
.
VarDesc
.
VarType
.
RAW
:
continue
new_var
=
save_block
.
create_var
(
name
=
each_var
.
name
,
shape
=
each_var
.
shape
,
dtype
=
each_var
.
dtype
,
type
=
each_var
.
type
,
lod_level
=
each_var
.
lod_level
,
persistable
=
True
)
file_path
=
os
.
path
.
join
(
dirname
,
new_var
.
name
)
file_path
=
os
.
path
.
normpath
(
file_path
)
save_block
.
append_op
(
type
=
'save'
,
inputs
=
{
'X'
:
[
new_var
]},
outputs
=
{},
attrs
=
{
'file_path'
:
file_path
})
executor
.
run
(
save_program
)
def
save_checkpoint
(
exe
,
program
,
ckpt_name
):
"""
"""
Save checkpoint for evaluation or resume training
Save checkpoint for evaluation or resume training
"""
"""
...
@@ -156,29 +126,22 @@ def save_checkpoint(exe, program, ckpt_name):
...
@@ -156,29 +126,22 @@ def save_checkpoint(exe, program, ckpt_name):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
os
.
makedirs
(
ckpt_dir
)
os
.
makedirs
(
ckpt_dir
)
save_vars
(
fluid
.
save
(
program
,
os
.
path
.
join
(
ckpt_dir
,
'model'
))
exe
,
ckpt_dir
,
program
,
vars
=
list
(
filter
(
fluid
.
io
.
is_persistable
,
program
.
list_vars
())))
return
ckpt_dir
return
ckpt_dir
def
load_checkpoint
(
exe
,
program
):
def
load_checkpoint
(
exe
,
program
):
"""
"""
Load checkpoiont f
rom pretrained model directory for resume
training
Load checkpoiont f
or resuming
training
"""
"""
print
(
'Resume model training from:'
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
)
if
not
os
.
path
.
exists
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
))
fluid
.
io
.
load_persistables
(
exe
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
,
main_program
=
program
)
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
print
(
'Resume model training from:'
,
model_path
)
if
not
os
.
path
.
exists
(
model_path
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
model_path
))
fluid
.
load
(
program
,
os
.
path
.
join
(
model_path
,
'model'
),
exe
)
# Check is path ended by path spearator
# Check is path ended by path spearator
if
model_path
[
-
1
]
==
os
.
sep
:
if
model_path
[
-
1
]
==
os
.
sep
:
model_path
=
model_path
[
0
:
-
1
]
model_path
=
model_path
[
0
:
-
1
]
...
@@ -193,7 +156,6 @@ def load_checkpoint(exe, program):
...
@@ -193,7 +156,6 @@ def load_checkpoint(exe, program):
else
:
else
:
raise
ValueError
(
"Resume model path is not valid!"
)
raise
ValueError
(
"Resume model path is not valid!"
)
print
(
"Model checkpoint loaded successfully!"
)
print
(
"Model checkpoint loaded successfully!"
)
return
begin_epoch
return
begin_epoch
...
@@ -289,6 +251,10 @@ def train(cfg):
...
@@ -289,6 +251,10 @@ def train(cfg):
ckpt_dir
=
cfg
.
SLIM
.
KNOWLEDGE_DISTILL_TEACHER_MODEL_DIR
ckpt_dir
=
cfg
.
SLIM
.
KNOWLEDGE_DISTILL_TEACHER_MODEL_DIR
assert
ckpt_dir
is
not
None
assert
ckpt_dir
is
not
None
print
(
'load teacher model:'
,
ckpt_dir
)
print
(
'load teacher model:'
,
ckpt_dir
)
if
os
.
path
.
exists
(
ckpt_dir
):
try
:
fluid
.
load
(
teacher_program
,
os
.
path
.
join
(
ckpt_dir
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
teacher_program
)
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
teacher_program
)
# cfg = load_config(FLAGS.config)
# cfg = load_config(FLAGS.config)
...
@@ -355,42 +321,8 @@ def train(cfg):
...
@@ -355,42 +321,8 @@ def train(cfg):
begin_epoch
=
load_checkpoint
(
exe
,
fluid
.
default_main_program
())
begin_epoch
=
load_checkpoint
(
exe
,
fluid
.
default_main_program
())
# Load pretrained model
# Load pretrained model
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
print_info
(
'Pretrained model dir: '
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_pretrained_weights
(
exe
,
fluid
.
default_main_program
(),
load_vars
=
[]
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_fail_vars
=
[]
def
var_shape_matched
(
var
,
shape
):
"""
Check whehter persitable variable shape is match with current network
"""
var_exist
=
os
.
path
.
exists
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_exist
:
var_shape
=
parse_shape_from_file
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
return
var_shape
==
shape
return
False
for
x
in
fluid
.
default_main_program
().
list_vars
():
if
isinstance
(
x
,
fluid
.
framework
.
Parameter
):
shape
=
tuple
(
fluid
.
global_scope
().
find_var
(
x
.
name
).
get_tensor
().
shape
())
if
var_shape_matched
(
x
,
shape
):
load_vars
.
append
(
x
)
else
:
load_fail_vars
.
append
(
x
)
fluid
.
io
.
load_vars
(
exe
,
dirname
=
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
vars
=
load_vars
)
for
var
in
load_vars
:
print_info
(
"Parameter[{}] loaded sucessfully!"
.
format
(
var
.
name
))
for
var
in
load_fail_vars
:
print_info
(
"Parameter[{}] don't exist or shape does not match current network, skip"
" to load it."
.
format
(
var
.
name
))
print_info
(
"{}/{} pretrained parameters loaded successfully!"
.
format
(
len
(
load_vars
),
len
(
load_vars
)
+
len
(
load_fail_vars
)))
else
:
else
:
print_info
(
print_info
(
'Pretrained model dir {} not exists, training from scratch...'
.
'Pretrained model dir {} not exists, training from scratch...'
.
...
@@ -475,12 +407,9 @@ def train(cfg):
...
@@ -475,12 +407,9 @@ def train(cfg):
step
)
step
)
log_writer
.
add_scalar
(
'Train/mean_acc'
,
mean_acc
,
log_writer
.
add_scalar
(
'Train/mean_acc'
,
mean_acc
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
log_writer
.
add_scalar
(
'Train/step/sec'
,
speed
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/step/sec'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
avg_loss
=
0.0
avg_loss
=
0.0
cm
.
zero_matrix
()
cm
.
zero_matrix
()
...
@@ -503,16 +432,13 @@ def train(cfg):
...
@@ -503,16 +432,13 @@ def train(cfg):
speed
=
args
.
log_steps
/
timer
.
elapsed_time
()
speed
=
args
.
log_steps
/
timer
.
elapsed_time
()
print
((
print
((
"epoch={} step={} lr={:.5f} loss={:.4f} teacher loss={:.4f} distill loss={:.4f} step/sec={:.3f} | ETA {}"
"epoch={} step={} lr={:.5f} loss={:.4f} teacher loss={:.4f} distill loss={:.4f} step/sec={:.3f} | ETA {}"
).
format
(
epoch
,
step
,
lr
[
0
],
avg_loss
,
).
format
(
epoch
,
step
,
lr
[
0
],
avg_loss
,
avg_t_loss
,
avg_
t_loss
,
avg_
d_loss
,
speed
,
avg_d_loss
,
speed
,
calculate_eta
(
all_step
-
step
,
speed
)))
calculate_eta
(
all_step
-
step
,
speed
)))
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
avg_loss
=
0.0
avg_loss
=
0.0
avg_t_loss
=
0.0
avg_t_loss
=
0.0
...
@@ -527,7 +453,7 @@ def train(cfg):
...
@@ -527,7 +453,7 @@ def train(cfg):
if
(
epoch
%
cfg
.
TRAIN
.
SNAPSHOT_EPOCH
==
0
if
(
epoch
%
cfg
.
TRAIN
.
SNAPSHOT_EPOCH
==
0
or
epoch
==
cfg
.
SOLVER
.
NUM_EPOCHS
)
and
cfg
.
TRAINER_ID
==
0
:
or
epoch
==
cfg
.
SOLVER
.
NUM_EPOCHS
)
and
cfg
.
TRAINER_ID
==
0
:
ckpt_dir
=
save_checkpoint
(
exe
,
fluid
.
default_main_program
(),
epoch
)
ckpt_dir
=
save_checkpoint
(
fluid
.
default_main_program
(),
epoch
)
if
args
.
do_eval
:
if
args
.
do_eval
:
print
(
"Evaluation start"
)
print
(
"Evaluation start"
)
...
@@ -537,10 +463,8 @@ def train(cfg):
...
@@ -537,10 +463,8 @@ def train(cfg):
use_gpu
=
args
.
use_gpu
,
use_gpu
=
args
.
use_gpu
,
use_mpio
=
args
.
use_mpio
)
use_mpio
=
args
.
use_mpio
)
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Evaluate/mean_iou'
,
mean_iou
,
log_writer
.
add_scalar
(
'Evaluate/mean_iou'
,
mean_iou
,
step
)
step
)
log_writer
.
add_scalar
(
'Evaluate/mean_acc'
,
mean_acc
,
step
)
log_writer
.
add_scalar
(
'Evaluate/mean_acc'
,
mean_acc
,
step
)
if
mean_iou
>
best_mIoU
:
if
mean_iou
>
best_mIoU
:
best_mIoU
=
mean_iou
best_mIoU
=
mean_iou
...
@@ -560,11 +484,11 @@ def train(cfg):
...
@@ -560,11 +484,11 @@ def train(cfg):
ckpt_dir
=
ckpt_dir
,
ckpt_dir
=
ckpt_dir
,
log_writer
=
log_writer
)
log_writer
=
log_writer
)
if
cfg
.
TRAINER_ID
==
0
:
if
cfg
.
TRAINER_ID
==
0
:
ckpt_dir
=
save_checkpoint
(
exe
,
fluid
.
default_main_program
(),
epoch
)
ckpt_dir
=
save_checkpoint
(
fluid
.
default_main_program
(),
epoch
)
# save final model
# save final model
if
cfg
.
TRAINER_ID
==
0
:
if
cfg
.
TRAINER_ID
==
0
:
save_checkpoint
(
exe
,
fluid
.
default_main_program
(),
'final'
)
save_checkpoint
(
fluid
.
default_main_program
(),
'final'
)
def
main
(
args
):
def
main
(
args
):
...
...
slim/nas/deeplab.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -27,6 +27,7 @@ from models.libs.model_libs import separate_conv
...
@@ -27,6 +27,7 @@ from models.libs.model_libs import separate_conv
from
models.backbone.mobilenet_v2
import
MobileNetV2
as
mobilenet_backbone
from
models.backbone.mobilenet_v2
import
MobileNetV2
as
mobilenet_backbone
from
models.backbone.xception
import
Xception
as
xception_backbone
from
models.backbone.xception
import
Xception
as
xception_backbone
def
encoder
(
input
):
def
encoder
(
input
):
# 编码器配置,采用ASPP架构,pooling + 1x1_conv + 三个不同尺度的空洞卷积并行, concat后1x1conv
# 编码器配置,采用ASPP架构,pooling + 1x1_conv + 三个不同尺度的空洞卷积并行, concat后1x1conv
# ASPP_WITH_SEP_CONV:默认为真,使用depthwise可分离卷积,否则使用普通卷积
# ASPP_WITH_SEP_CONV:默认为真,使用depthwise可分离卷积,否则使用普通卷积
...
@@ -47,8 +48,7 @@ def encoder(input):
...
@@ -47,8 +48,7 @@ def encoder(input):
with
scope
(
'encoder'
):
with
scope
(
'encoder'
):
channel
=
256
channel
=
256
with
scope
(
"image_pool"
):
with
scope
(
"image_pool"
):
image_avg
=
fluid
.
layers
.
reduce_mean
(
image_avg
=
fluid
.
layers
.
reduce_mean
(
input
,
[
2
,
3
],
keep_dim
=
True
)
input
,
[
2
,
3
],
keep_dim
=
True
)
image_avg
=
bn_relu
(
image_avg
=
bn_relu
(
conv
(
conv
(
image_avg
,
image_avg
,
...
@@ -191,7 +191,10 @@ def nas_backbone(input, arch):
...
@@ -191,7 +191,10 @@ def nas_backbone(input, arch):
end_points
=
8
end_points
=
8
decode_point
=
3
decode_point
=
3
data
,
decode_shortcuts
=
arch
(
data
,
decode_shortcuts
=
arch
(
input
,
end_points
=
end_points
,
return_block
=
decode_point
,
output_stride
=
16
)
input
,
end_points
=
end_points
,
return_block
=
decode_point
,
output_stride
=
16
)
decode_shortcut
=
decode_shortcuts
[
decode_point
]
decode_shortcut
=
decode_shortcuts
[
decode_point
]
return
data
,
decode_shortcut
return
data
,
decode_shortcut
...
...
slim/nas/eval_nas.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -123,6 +123,9 @@ def evaluate(cfg, ckpt_dir=None, use_gpu=False, use_mpio=False, **kwargs):
...
@@ -123,6 +123,9 @@ def evaluate(cfg, ckpt_dir=None, use_gpu=False, use_mpio=False, **kwargs):
if
ckpt_dir
is
not
None
:
if
ckpt_dir
is
not
None
:
print
(
'load test model:'
,
ckpt_dir
)
print
(
'load test model:'
,
ckpt_dir
)
try
:
fluid
.
load
(
test_prog
,
os
.
path
.
join
(
ckpt_dir
,
'model'
),
exe
)
except
:
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
fluid
.
io
.
load_params
(
exe
,
ckpt_dir
,
main_program
=
test_prog
)
# Use streaming confusion matrix to calculate mean_iou
# Use streaming confusion matrix to calculate mean_iou
...
...
slim/nas/mobilenetv2_search_space.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
@@ -95,8 +96,8 @@ class MobileNetV2SpaceSeg(SearchSpaceBase):
...
@@ -95,8 +96,8 @@ class MobileNetV2SpaceSeg(SearchSpaceBase):
tokens
=
self
.
init_tokens
()
tokens
=
self
.
init_tokens
()
self
.
bottleneck_params_list
=
[]
self
.
bottleneck_params_list
=
[]
self
.
bottleneck_params_list
.
append
(
self
.
bottleneck_params_list
.
append
(
(
1
,
self
.
head_num
[
tokens
[
0
]],
1
,
1
,
(
1
,
self
.
head_num
[
tokens
[
0
]],
1
,
1
,
3
))
3
))
self
.
bottleneck_params_list
.
append
(
self
.
bottleneck_params_list
.
append
(
(
self
.
multiply
[
tokens
[
1
]],
self
.
filter_num1
[
tokens
[
2
]],
(
self
.
multiply
[
tokens
[
1
]],
self
.
filter_num1
[
tokens
[
2
]],
self
.
repeat
[
tokens
[
3
]],
2
,
self
.
k_size
[
tokens
[
4
]]))
self
.
repeat
[
tokens
[
3
]],
2
,
self
.
k_size
[
tokens
[
4
]]))
...
...
slim/nas/model_builder.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
slim/nas/train_nas.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -47,6 +47,7 @@ from model_builder import parse_shape_from_file
...
@@ -47,6 +47,7 @@ from model_builder import parse_shape_from_file
from
eval_nas
import
evaluate
from
eval_nas
import
evaluate
from
vis
import
visualize
from
vis
import
visualize
from
utils
import
dist_utils
from
utils
import
dist_utils
from
utils.load_model_utils
import
load_pretrained_weights
from
mobilenetv2_search_space
import
MobileNetV2SpaceSeg
from
mobilenetv2_search_space
import
MobileNetV2SpaceSeg
from
paddleslim.nas.search_space.search_space_factory
import
SearchSpaceFactory
from
paddleslim.nas.search_space.search_space_factory
import
SearchSpaceFactory
...
@@ -116,38 +117,7 @@ def parse_args():
...
@@ -116,38 +117,7 @@ def parse_args():
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
save_vars
(
executor
,
dirname
,
program
=
None
,
vars
=
None
):
def
save_checkpoint
(
program
,
ckpt_name
):
"""
Temporary resolution for Win save variables compatability.
Will fix in PaddlePaddle v1.5.2
"""
save_program
=
fluid
.
Program
()
save_block
=
save_program
.
global_block
()
for
each_var
in
vars
:
# NOTE: don't save the variable which type is RAW
if
each_var
.
type
==
fluid
.
core
.
VarDesc
.
VarType
.
RAW
:
continue
new_var
=
save_block
.
create_var
(
name
=
each_var
.
name
,
shape
=
each_var
.
shape
,
dtype
=
each_var
.
dtype
,
type
=
each_var
.
type
,
lod_level
=
each_var
.
lod_level
,
persistable
=
True
)
file_path
=
os
.
path
.
join
(
dirname
,
new_var
.
name
)
file_path
=
os
.
path
.
normpath
(
file_path
)
save_block
.
append_op
(
type
=
'save'
,
inputs
=
{
'X'
:
[
new_var
]},
outputs
=
{},
attrs
=
{
'file_path'
:
file_path
})
executor
.
run
(
save_program
)
def
save_checkpoint
(
exe
,
program
,
ckpt_name
):
"""
"""
Save checkpoint for evaluation or resume training
Save checkpoint for evaluation or resume training
"""
"""
...
@@ -156,29 +126,22 @@ def save_checkpoint(exe, program, ckpt_name):
...
@@ -156,29 +126,22 @@ def save_checkpoint(exe, program, ckpt_name):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
if
not
os
.
path
.
isdir
(
ckpt_dir
):
os
.
makedirs
(
ckpt_dir
)
os
.
makedirs
(
ckpt_dir
)
save_vars
(
fluid
.
save
(
program
,
os
.
path
.
join
(
ckpt_dir
,
'model'
))
exe
,
ckpt_dir
,
program
,
vars
=
list
(
filter
(
fluid
.
io
.
is_persistable
,
program
.
list_vars
())))
return
ckpt_dir
return
ckpt_dir
def
load_checkpoint
(
exe
,
program
):
def
load_checkpoint
(
exe
,
program
):
"""
"""
Load checkpoiont f
rom pretrained model directory for resume
training
Load checkpoiont f
or resuming
training
"""
"""
print
(
'Resume model training from:'
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
)
if
not
os
.
path
.
exists
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
))
fluid
.
io
.
load_persistables
(
exe
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
,
main_program
=
program
)
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
print
(
'Resume model training from:'
,
model_path
)
if
not
os
.
path
.
exists
(
model_path
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
model_path
))
fluid
.
load
(
program
,
os
.
path
.
join
(
model_path
,
'model'
),
exe
)
# Check is path ended by path spearator
# Check is path ended by path spearator
if
model_path
[
-
1
]
==
os
.
sep
:
if
model_path
[
-
1
]
==
os
.
sep
:
model_path
=
model_path
[
0
:
-
1
]
model_path
=
model_path
[
0
:
-
1
]
...
@@ -193,7 +156,6 @@ def load_checkpoint(exe, program):
...
@@ -193,7 +156,6 @@ def load_checkpoint(exe, program):
else
:
else
:
raise
ValueError
(
"Resume model path is not valid!"
)
raise
ValueError
(
"Resume model path is not valid!"
)
print
(
"Model checkpoint loaded successfully!"
)
print
(
"Model checkpoint loaded successfully!"
)
return
begin_epoch
return
begin_epoch
...
@@ -245,8 +207,6 @@ def train(cfg):
...
@@ -245,8 +207,6 @@ def train(cfg):
yield
item
[
0
],
item
[
1
],
item
[
2
]
yield
item
[
0
],
item
[
1
],
item
[
2
]
# Get device environment
# Get device environment
# places = fluid.cuda_places() if args.use_gpu else fluid.cpu_places()
# place = places[0]
gpu_id
=
int
(
os
.
environ
.
get
(
'FLAGS_selected_gpus'
,
0
))
gpu_id
=
int
(
os
.
environ
.
get
(
'FLAGS_selected_gpus'
,
0
))
place
=
fluid
.
CUDAPlace
(
gpu_id
)
if
args
.
use_gpu
else
fluid
.
CPUPlace
()
place
=
fluid
.
CUDAPlace
(
gpu_id
)
if
args
.
use_gpu
else
fluid
.
CPUPlace
()
places
=
fluid
.
cuda_places
()
if
args
.
use_gpu
else
fluid
.
cpu_places
()
places
=
fluid
.
cuda_places
()
if
args
.
use_gpu
else
fluid
.
cpu_places
()
...
@@ -326,43 +286,8 @@ def train(cfg):
...
@@ -326,43 +286,8 @@ def train(cfg):
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
# Load pretrained model
# Load pretrained model
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
print_info
(
'Pretrained model dir: '
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_pretrained_weights
(
exe
,
train_prog
,
load_vars
=
[]
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_fail_vars
=
[]
def
var_shape_matched
(
var
,
shape
):
"""
Check whehter persitable variable shape is match with current network
"""
var_exist
=
os
.
path
.
exists
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_exist
:
var_shape
=
parse_shape_from_file
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
return
var_shape
==
shape
return
False
for
x
in
train_prog
.
list_vars
():
if
isinstance
(
x
,
fluid
.
framework
.
Parameter
):
shape
=
tuple
(
fluid
.
global_scope
().
find_var
(
x
.
name
).
get_tensor
().
shape
())
if
var_shape_matched
(
x
,
shape
):
load_vars
.
append
(
x
)
else
:
load_fail_vars
.
append
(
x
)
fluid
.
io
.
load_vars
(
exe
,
dirname
=
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
vars
=
load_vars
)
for
var
in
load_vars
:
print_info
(
"Parameter[{}] loaded sucessfully!"
.
format
(
var
.
name
))
for
var
in
load_fail_vars
:
print_info
(
"Parameter[{}] don't exist or shape does not match current network, skip"
" to load it."
.
format
(
var
.
name
))
print_info
(
"{}/{} pretrained parameters loaded successfully!"
.
format
(
len
(
load_vars
),
len
(
load_vars
)
+
len
(
load_fail_vars
)))
else
:
else
:
print_info
(
print_info
(
'Pretrained model dir {} not exists, training from scratch...'
.
'Pretrained model dir {} not exists, training from scratch...'
.
...
@@ -419,8 +344,7 @@ def train(cfg):
...
@@ -419,8 +344,7 @@ def train(cfg):
except
Exception
as
e
:
except
Exception
as
e
:
print
(
e
)
print
(
e
)
if
epoch
>
cfg
.
SLIM
.
NAS_START_EVAL_EPOCH
:
if
epoch
>
cfg
.
SLIM
.
NAS_START_EVAL_EPOCH
:
ckpt_dir
=
save_checkpoint
(
exe
,
train_prog
,
ckpt_dir
=
save_checkpoint
(
train_prog
,
'{}_tmp'
.
format
(
port
))
'{}_tmp'
.
format
(
port
))
_
,
mean_iou
,
_
,
mean_acc
=
evaluate
(
_
,
mean_iou
,
_
,
mean_acc
=
evaluate
(
cfg
=
cfg
,
cfg
=
cfg
,
arch
=
arch
,
arch
=
arch
,
...
...
slim/prune/eval_prune.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
slim/prune/train_prune.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -46,6 +46,7 @@ from models.model_builder import parse_shape_from_file
...
@@ -46,6 +46,7 @@ from models.model_builder import parse_shape_from_file
from
eval_prune
import
evaluate
from
eval_prune
import
evaluate
from
vis
import
visualize
from
vis
import
visualize
from
utils
import
dist_utils
from
utils
import
dist_utils
from
utils.load_model_utils
import
load_pretrained_weights
from
paddleslim.prune
import
Pruner
,
save_model
from
paddleslim.prune
import
Pruner
,
save_model
from
paddleslim.analysis
import
flops
from
paddleslim.analysis
import
flops
...
@@ -285,42 +286,7 @@ def train(cfg):
...
@@ -285,42 +286,7 @@ def train(cfg):
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
# Load pretrained model
# Load pretrained model
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
print_info
(
'Pretrained model dir: '
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_pretrained_weights
(
exe
,
train_prog
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_vars
=
[]
load_fail_vars
=
[]
def
var_shape_matched
(
var
,
shape
):
"""
Check whehter persitable variable shape is match with current network
"""
var_exist
=
os
.
path
.
exists
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_exist
:
var_shape
=
parse_shape_from_file
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
return
var_shape
==
shape
return
False
for
x
in
train_prog
.
list_vars
():
if
isinstance
(
x
,
fluid
.
framework
.
Parameter
):
shape
=
tuple
(
fluid
.
global_scope
().
find_var
(
x
.
name
).
get_tensor
().
shape
())
if
var_shape_matched
(
x
,
shape
):
load_vars
.
append
(
x
)
else
:
load_fail_vars
.
append
(
x
)
fluid
.
io
.
load_vars
(
exe
,
dirname
=
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
vars
=
load_vars
)
for
var
in
load_vars
:
print_info
(
"Parameter[{}] loaded sucessfully!"
.
format
(
var
.
name
))
for
var
in
load_fail_vars
:
print_info
(
"Parameter[{}] don't exist or shape does not match current network, skip"
" to load it."
.
format
(
var
.
name
))
print_info
(
"{}/{} pretrained parameters loaded successfully!"
.
format
(
len
(
load_vars
),
len
(
load_vars
)
+
len
(
load_fail_vars
)))
else
:
else
:
print_info
(
print_info
(
'Pretrained model dir {} not exists, training from scratch...'
.
'Pretrained model dir {} not exists, training from scratch...'
.
...
@@ -409,12 +375,9 @@ def train(cfg):
...
@@ -409,12 +375,9 @@ def train(cfg):
step
)
step
)
log_writer
.
add_scalar
(
'Train/mean_acc'
,
mean_acc
,
log_writer
.
add_scalar
(
'Train/mean_acc'
,
mean_acc
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
log_writer
.
add_scalar
(
'Train/step/sec'
,
speed
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/step/sec'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
avg_loss
=
0.0
avg_loss
=
0.0
cm
.
zero_matrix
()
cm
.
zero_matrix
()
...
@@ -436,12 +399,9 @@ def train(cfg):
...
@@ -436,12 +399,9 @@ def train(cfg):
).
format
(
epoch
,
step
,
lr
[
0
],
avg_loss
,
speed
,
).
format
(
epoch
,
step
,
lr
[
0
],
avg_loss
,
speed
,
calculate_eta
(
all_step
-
step
,
speed
)))
calculate_eta
(
all_step
-
step
,
speed
)))
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
log_writer
.
add_scalar
(
'Train/loss'
,
avg_loss
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
step
)
log_writer
.
add_scalar
(
'Train/lr'
,
lr
[
0
],
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
step
)
log_writer
.
add_scalar
(
'Train/speed'
,
speed
,
step
)
sys
.
stdout
.
flush
()
sys
.
stdout
.
flush
()
avg_loss
=
0.0
avg_loss
=
0.0
timer
.
restart
()
timer
.
restart
()
...
@@ -464,10 +424,8 @@ def train(cfg):
...
@@ -464,10 +424,8 @@ def train(cfg):
use_gpu
=
args
.
use_gpu
,
use_gpu
=
args
.
use_gpu
,
use_mpio
=
args
.
use_mpio
)
use_mpio
=
args
.
use_mpio
)
if
args
.
use_vdl
:
if
args
.
use_vdl
:
log_writer
.
add_scalar
(
'Evaluate/mean_iou'
,
mean_iou
,
log_writer
.
add_scalar
(
'Evaluate/mean_iou'
,
mean_iou
,
step
)
step
)
log_writer
.
add_scalar
(
'Evaluate/mean_acc'
,
mean_acc
,
step
)
log_writer
.
add_scalar
(
'Evaluate/mean_acc'
,
mean_acc
,
step
)
# Use VisualDL to visualize results
# Use VisualDL to visualize results
if
args
.
use_vdl
and
cfg
.
DATASET
.
VIS_FILE_LIST
is
not
None
:
if
args
.
use_vdl
and
cfg
.
DATASET
.
VIS_FILE_LIST
is
not
None
:
...
...
slim/quantization/eval_quant.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
slim/quantization/export_model.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
...
slim/quantization/train_quant.py
浏览文件 @
7835c042
# coding: utf8
# coding: utf8
#
c
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
C
opyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License");
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
...
@@ -40,7 +40,8 @@ from models.model_builder import parse_shape_from_file
...
@@ -40,7 +40,8 @@ from models.model_builder import parse_shape_from_file
from
eval_quant
import
evaluate
from
eval_quant
import
evaluate
from
vis
import
visualize
from
vis
import
visualize
from
utils
import
dist_utils
from
utils
import
dist_utils
from
train
import
save_vars
,
save_checkpoint
,
load_checkpoint
,
update_best_model
,
print_info
from
utils.load_model_utils
import
load_pretrained_weights
from
train
import
update_best_model
,
print_info
from
paddleslim.quant
import
quant_aware
from
paddleslim.quant
import
quant_aware
...
@@ -103,6 +104,55 @@ def parse_args():
...
@@ -103,6 +104,55 @@ def parse_args():
return
parser
.
parse_args
()
return
parser
.
parse_args
()
def
save_checkpoint
(
exe
,
program
,
ckpt_name
):
"""
Save checkpoint for evaluation or resume training
"""
ckpt_dir
=
os
.
path
.
join
(
cfg
.
TRAIN
.
MODEL_SAVE_DIR
,
str
(
ckpt_name
))
print
(
"Save model checkpoint to {}"
.
format
(
ckpt_dir
))
if
not
os
.
path
.
isdir
(
ckpt_dir
):
os
.
makedirs
(
ckpt_dir
)
fluid
.
io
.
save_vars
(
exe
,
ckpt_dir
,
program
,
vars
=
list
(
filter
(
fluid
.
io
.
is_persistable
,
program
.
list_vars
())))
return
ckpt_dir
def
load_checkpoint
(
exe
,
program
):
"""
Load checkpoiont from pretrained model directory for resume training
"""
print
(
'Resume model training from:'
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
)
if
not
os
.
path
.
exists
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
):
raise
ValueError
(
"TRAIN.PRETRAIN_MODEL {} not exist!"
.
format
(
cfg
.
TRAIN
.
RESUME_MODEL_DIR
))
fluid
.
io
.
load_persistables
(
exe
,
cfg
.
TRAIN
.
RESUME_MODEL_DIR
,
main_program
=
program
)
model_path
=
cfg
.
TRAIN
.
RESUME_MODEL_DIR
# Check is path ended by path spearator
if
model_path
[
-
1
]
==
os
.
sep
:
model_path
=
model_path
[
0
:
-
1
]
epoch_name
=
os
.
path
.
basename
(
model_path
)
# If resume model is final model
if
epoch_name
==
'final'
:
begin_epoch
=
cfg
.
SOLVER
.
NUM_EPOCHS
# If resume model path is end of digit, restore epoch status
elif
epoch_name
.
isdigit
():
epoch
=
int
(
epoch_name
)
begin_epoch
=
epoch
+
1
else
:
raise
ValueError
(
"Resume model path is not valid!"
)
print
(
"Model checkpoint loaded successfully!"
)
return
begin_epoch
def
train_quant
(
cfg
):
def
train_quant
(
cfg
):
startup_prog
=
fluid
.
Program
()
startup_prog
=
fluid
.
Program
()
train_prog
=
fluid
.
Program
()
train_prog
=
fluid
.
Program
()
...
@@ -182,42 +232,7 @@ def train_quant(cfg):
...
@@ -182,42 +232,7 @@ def train_quant(cfg):
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
begin_epoch
=
load_checkpoint
(
exe
,
train_prog
)
# Load pretrained model
# Load pretrained model
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
elif
os
.
path
.
exists
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
):
print_info
(
'Pretrained model dir: '
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_pretrained_weights
(
exe
,
train_prog
,
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
)
load_vars
=
[]
load_fail_vars
=
[]
def
var_shape_matched
(
var
,
shape
):
"""
Check whehter persitable variable shape is match with current network
"""
var_exist
=
os
.
path
.
exists
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
if
var_exist
:
var_shape
=
parse_shape_from_file
(
os
.
path
.
join
(
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
var
.
name
))
return
var_shape
==
shape
return
False
for
x
in
train_prog
.
list_vars
():
if
isinstance
(
x
,
fluid
.
framework
.
Parameter
):
shape
=
tuple
(
fluid
.
global_scope
().
find_var
(
x
.
name
).
get_tensor
().
shape
())
if
var_shape_matched
(
x
,
shape
):
load_vars
.
append
(
x
)
else
:
load_fail_vars
.
append
(
x
)
fluid
.
io
.
load_vars
(
exe
,
dirname
=
cfg
.
TRAIN
.
PRETRAINED_MODEL_DIR
,
vars
=
load_vars
)
for
var
in
load_vars
:
print_info
(
"Parameter[{}] loaded sucessfully!"
.
format
(
var
.
name
))
for
var
in
load_fail_vars
:
print_info
(
"Parameter[{}] don't exist or shape does not match current network, skip"
" to load it."
.
format
(
var
.
name
))
print_info
(
"{}/{} pretrained parameters loaded successfully!"
.
format
(
len
(
load_vars
),
len
(
load_vars
)
+
len
(
load_fail_vars
)))
else
:
else
:
print_info
(
print_info
(
'Pretrained model dir {} not exists, training from scratch...'
.
'Pretrained model dir {} not exists, training from scratch...'
.
...
...
test/local_test_cityscapes.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
test/local_test_pet.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
test/test_utils.py
浏览文件 @
7835c042
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
# coding: utf8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserve.
#
#
# Licensed under the Apache License, Version 2.0 (the "License"
# Licensed under the Apache License, Version 2.0 (the "License"
);
# you may not use this file except in compliance with the License.
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
# You may obtain a copy of the License at
#
#
...
...
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}
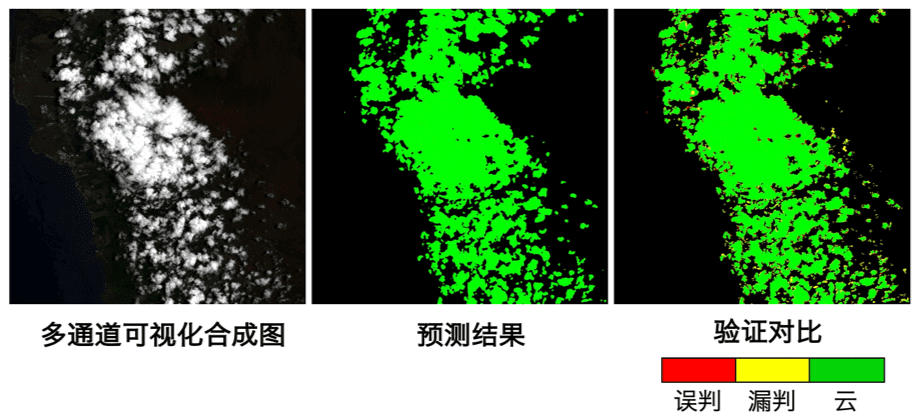
{kind=link}
