Merge branch 'dygraph' into lite
Showing
configs/e2e/e2e_r50_vd_pg.yml
0 → 100644
deploy/pdserving/README.md
0 → 100644
deploy/pdserving/README_CN.md
0 → 100644
deploy/pdserving/__init__.py
0 → 100644
deploy/pdserving/config.yml
0 → 100644
{kind=link}
文件已移动
{kind=link}
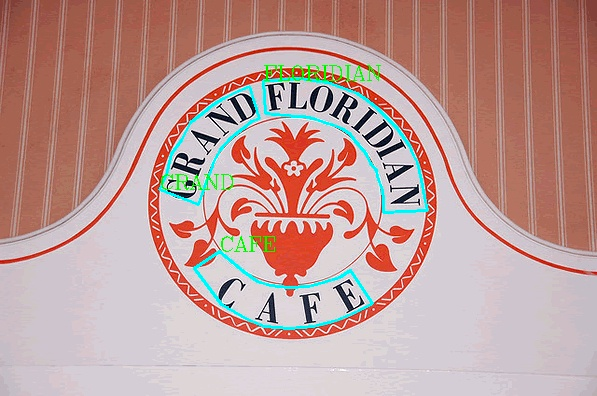
deploy/pdserving/imgs/results.png
0 → 100644
{kind=link}
119.4 KB
{kind=link}
194.6 KB
deploy/pdserving/ocr_reader.py
0 → 100644
deploy/pdserving/web_service.py
0 → 100644
doc/doc_ch/multi_languages.md
0 → 100644
doc/doc_ch/pgnet.md
0 → 100644
{kind=link}

662.8 KB
{kind=link}
466.8 KB
{kind=link}

133.6 KB
{kind=link}

337.2 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
doc/pgnet_framework.png
0 → 100644
{kind=link}

241.7 KB
ppocr/data/imaug/pg_process.py
0 → 100644
ppocr/data/pgnet_dataset.py
0 → 100644
ppocr/losses/e2e_pg_loss.py
0 → 100644
ppocr/metrics/e2e_metric.py
0 → 100644
ppocr/modeling/necks/pg_fpn.py
0 → 100644
ppocr/utils/dict/arabic_dict.txt
0 → 100644
ppocr/utils/dict/latin_dict.txt
0 → 100644
ppocr/utils/e2e_metric/Deteval.py
0 → 100755
ppocr/utils/e2e_utils/visual.py
0 → 100644
| ... | @@ -7,4 +7,5 @@ opencv-python==4.2.0.32 | ... | @@ -7,4 +7,5 @@ opencv-python==4.2.0.32 |
| tqdm | tqdm | ||
| numpy | numpy | ||
| visualdl | visualdl | ||
| python-Levenshtein | python-Levenshtein | ||
| \ No newline at end of file | opencv-contrib-python | ||
| \ No newline at end of file |
tools/infer/predict_e2e.py
0 → 100755
tools/infer_e2e.py
0 → 100755