内核开发指南文档根据外部意见优化
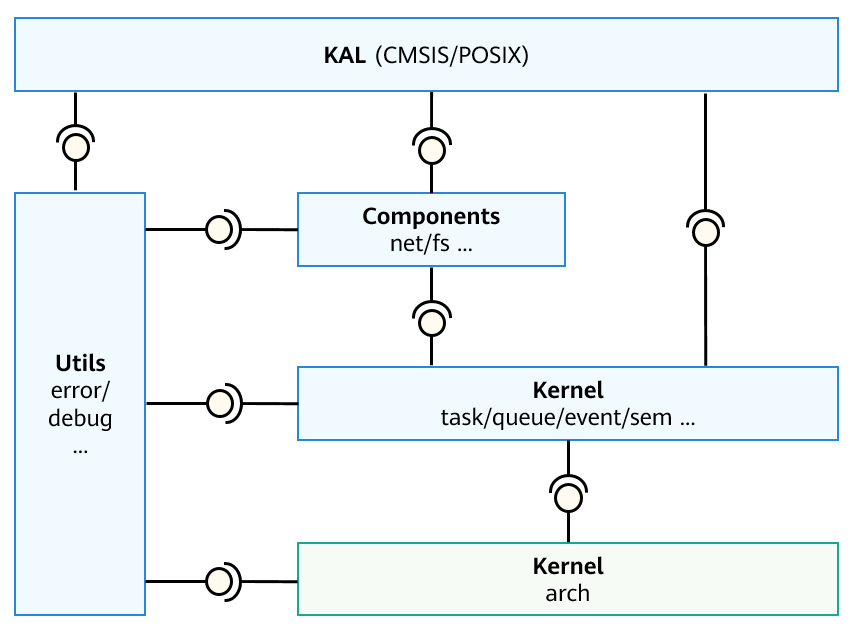
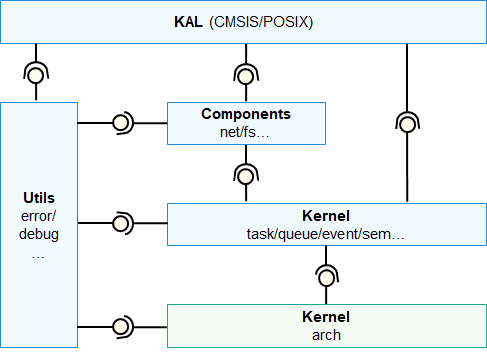
1、更新M核架构图与文字描述;
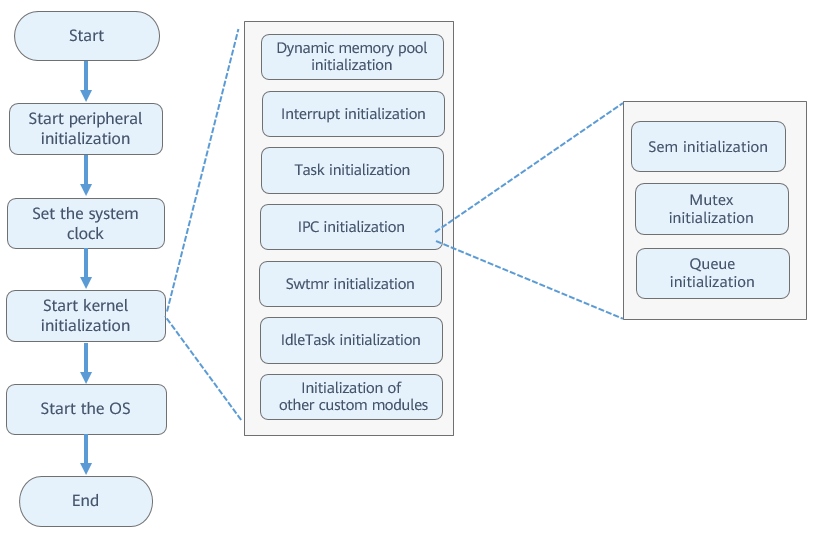
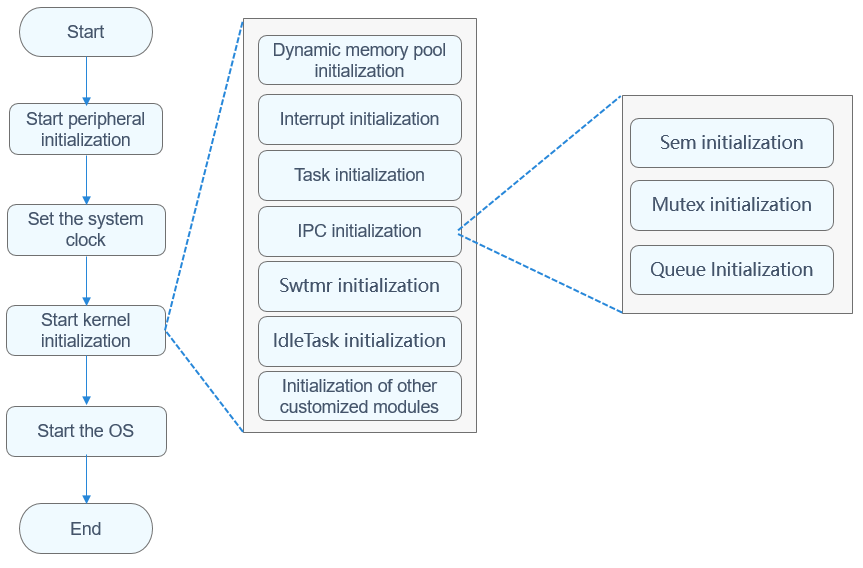
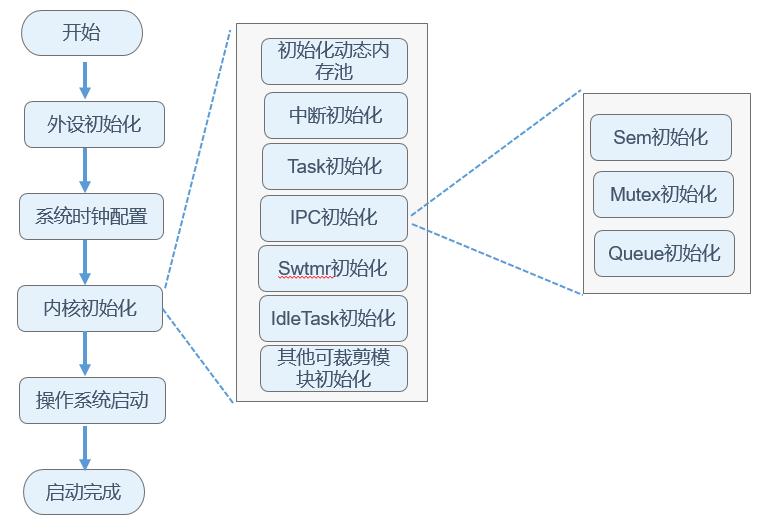
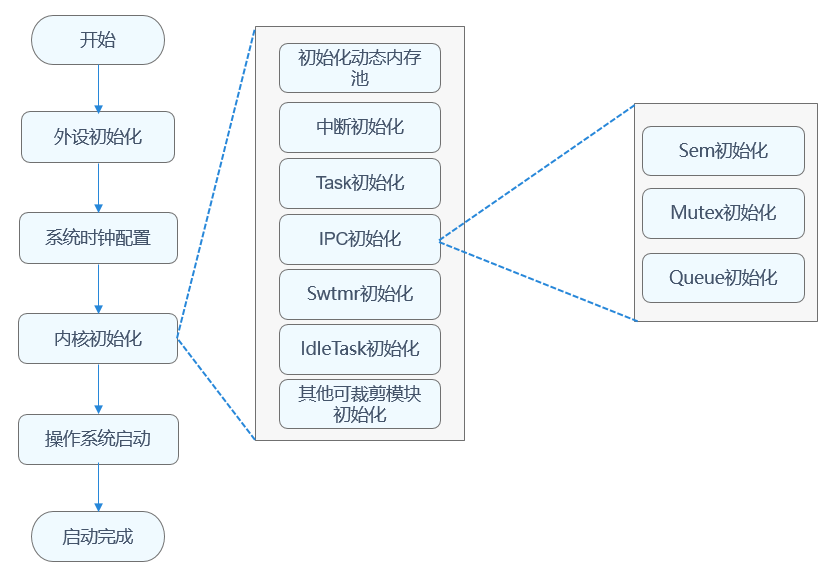
2、M核启动流程图格式挑战
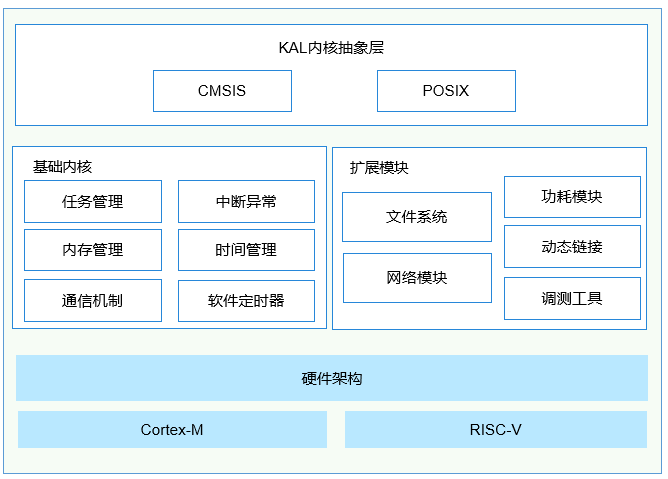
3、A核中术语调整:线程改为任务
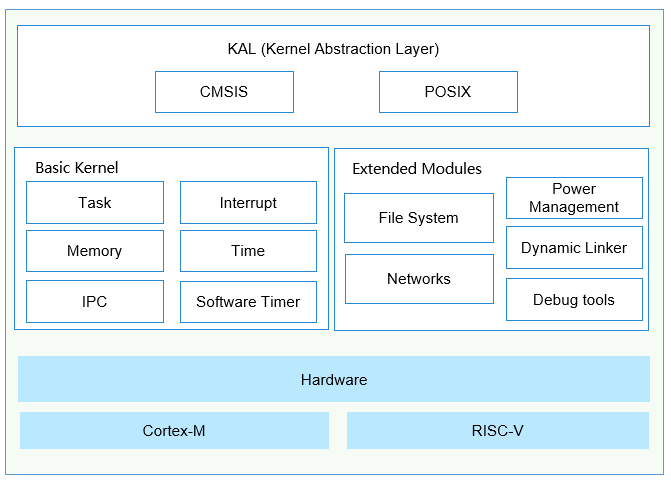
4、A核扩展组件中漏了动态加载标题
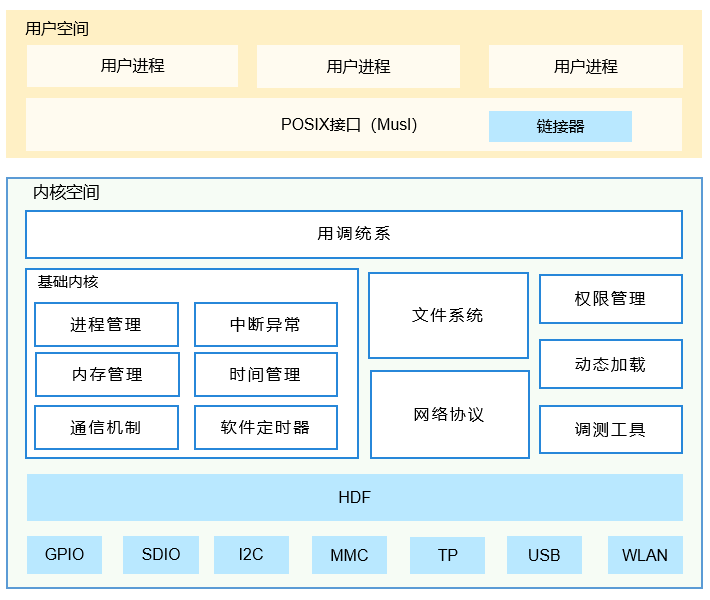
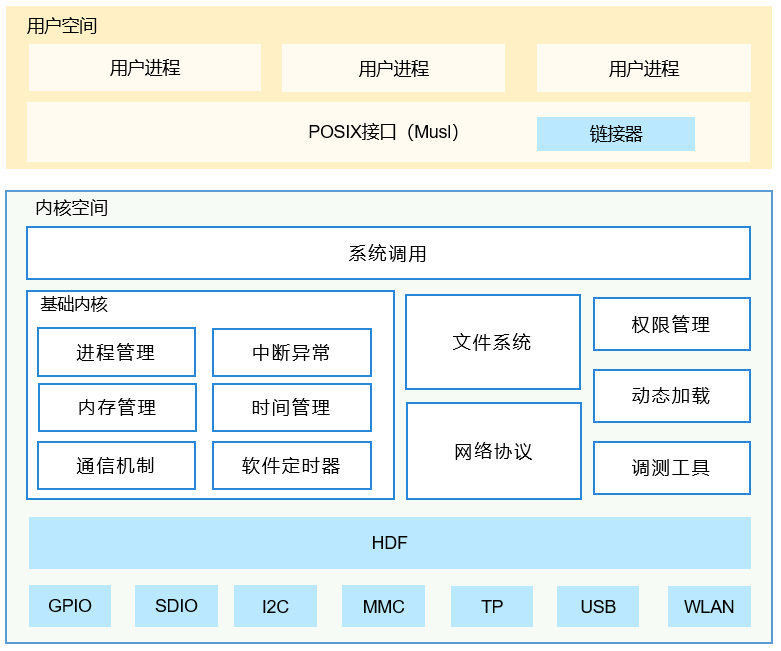
5、A核架构图中“系统调用”文字方向修正
6、中文部分标题同步更新英文
Signed-off-by: Nkenneth <zhushangyuan@huawei.com>
Showing
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H: