!20 文档格式调整
Merge pull request !20 from woqidaideshi/master
Showing
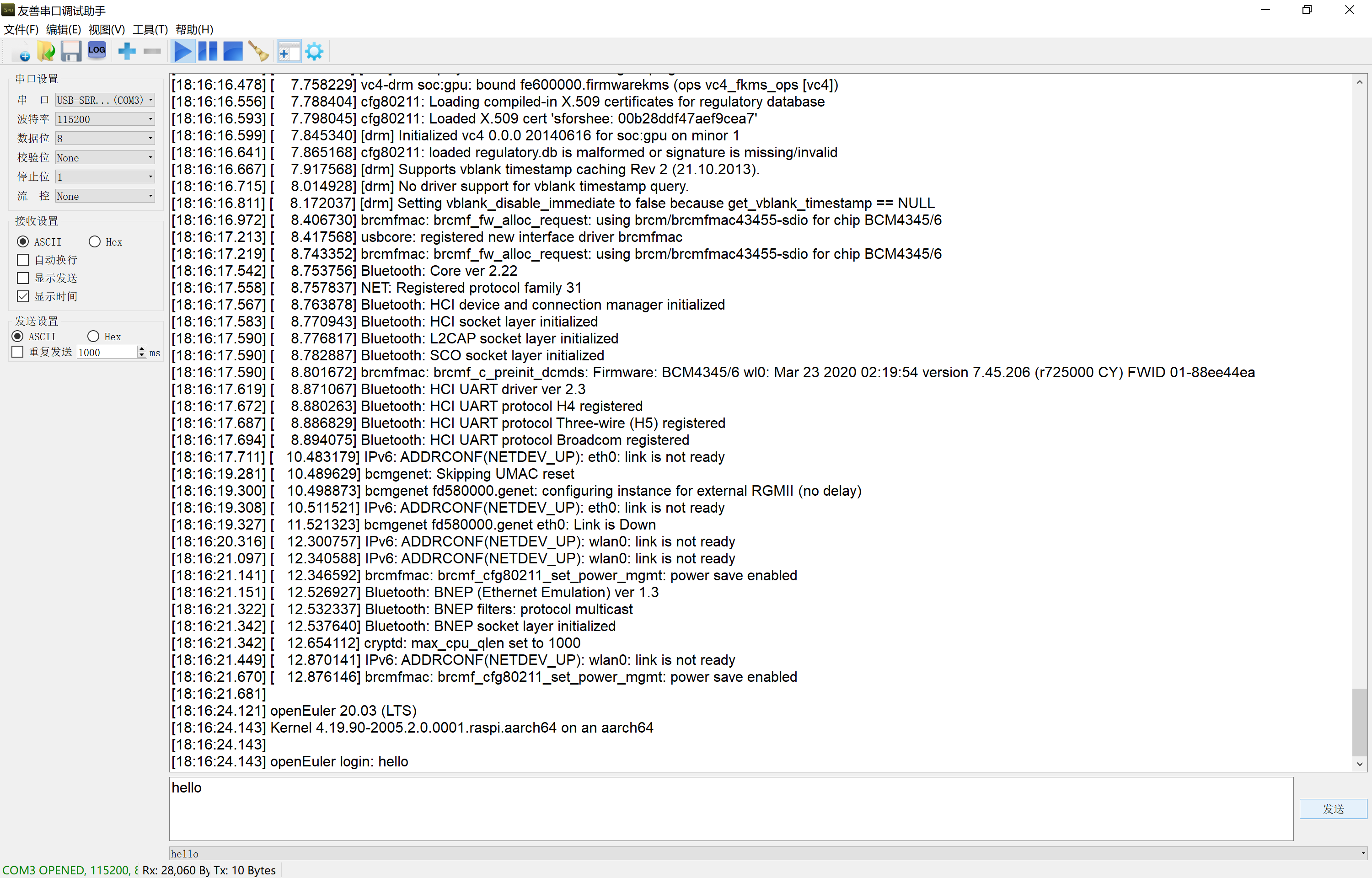
documents/images/串口输出.png
0 → 100644
{kind=link}
368.1 KB
{kind=link}
{kind=link}

| W: | H:
| W: | H:
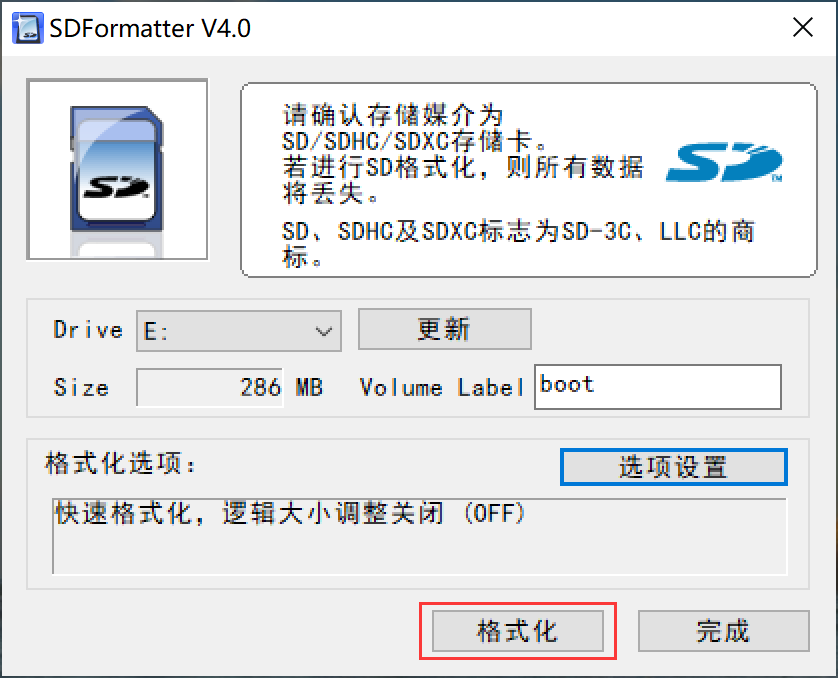
documents/images/格式化前.png
已删除
100644 → 0
{kind=link}
49.9 KB
documents/images/格式化后.png
已删除
100644 → 0
{kind=link}

49.2 KB