add gd32407v-start
Showing
bsp/gd32/docs/GD32系列BSP制作教程.md
0 → 100644
bsp/gd32/docs/GD32系列驱动介绍.md
0 → 100644
{kind=link}

9.0 KB
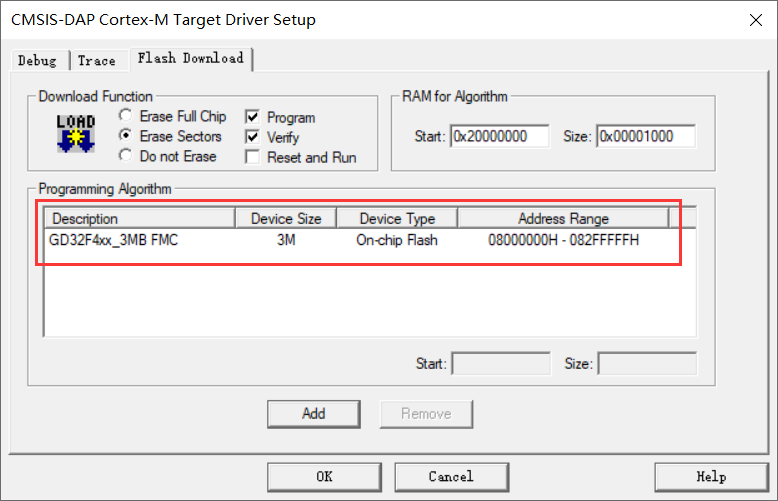
bsp/gd32/docs/figures/FMC.png
0 → 100644
{kind=link}
70.2 KB
{kind=link}
18.3 KB
{kind=link}

26.2 KB
{kind=link}

28.9 KB
{kind=link}
37.0 KB
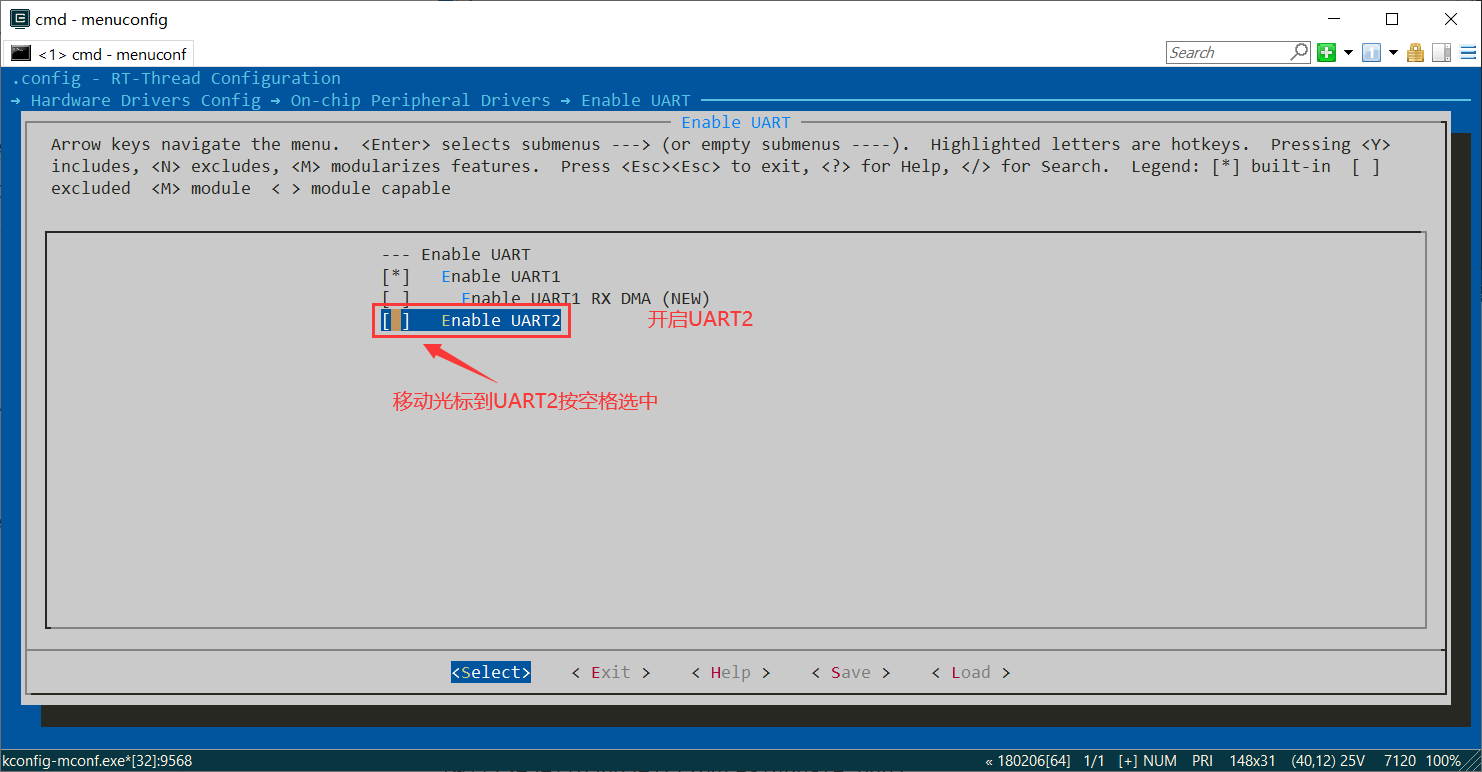
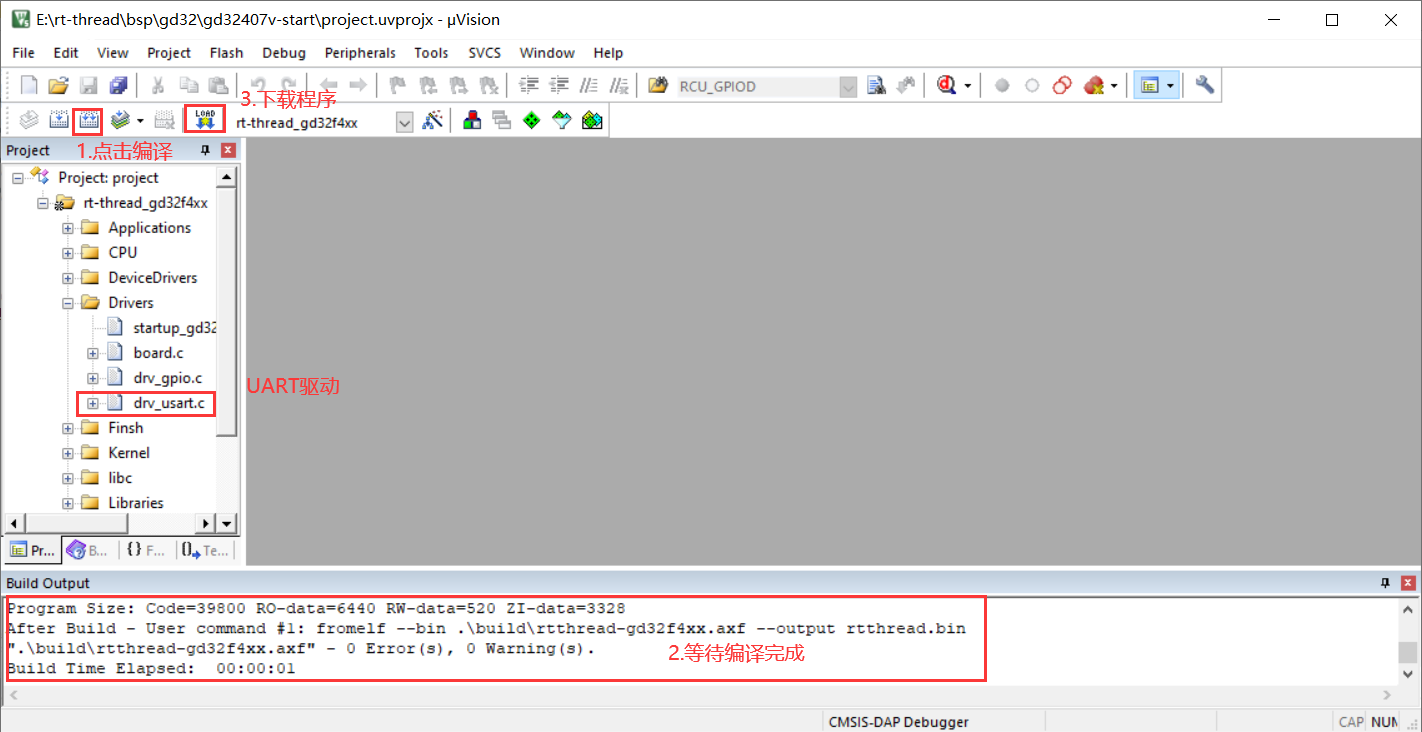
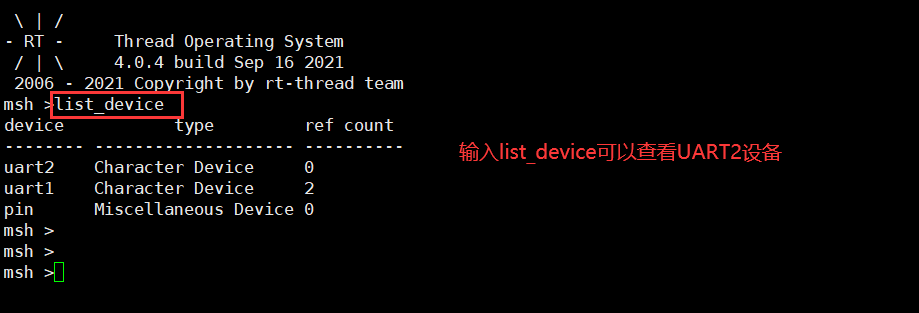
bsp/gd32/docs/figures/UART2.png
0 → 100644
{kind=link}
47.7 KB
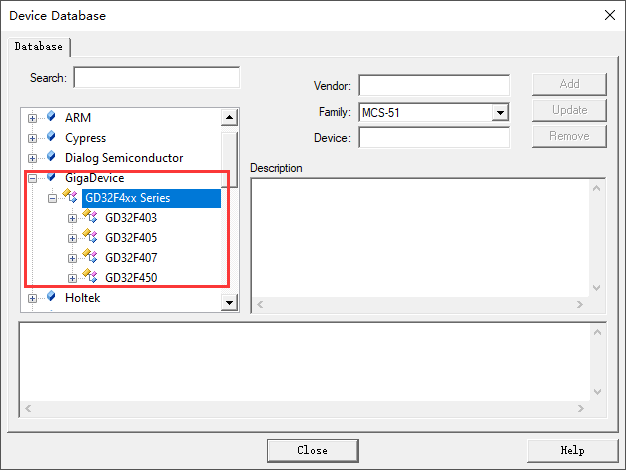
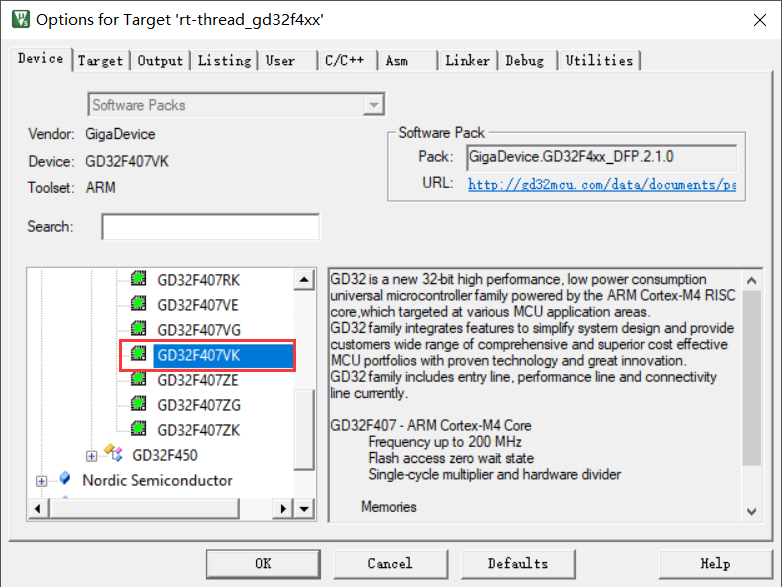
bsp/gd32/docs/figures/chip.png
0 → 100644
{kind=link}
148.6 KB
{kind=link}

6.9 KB
{kind=link}
154.0 KB
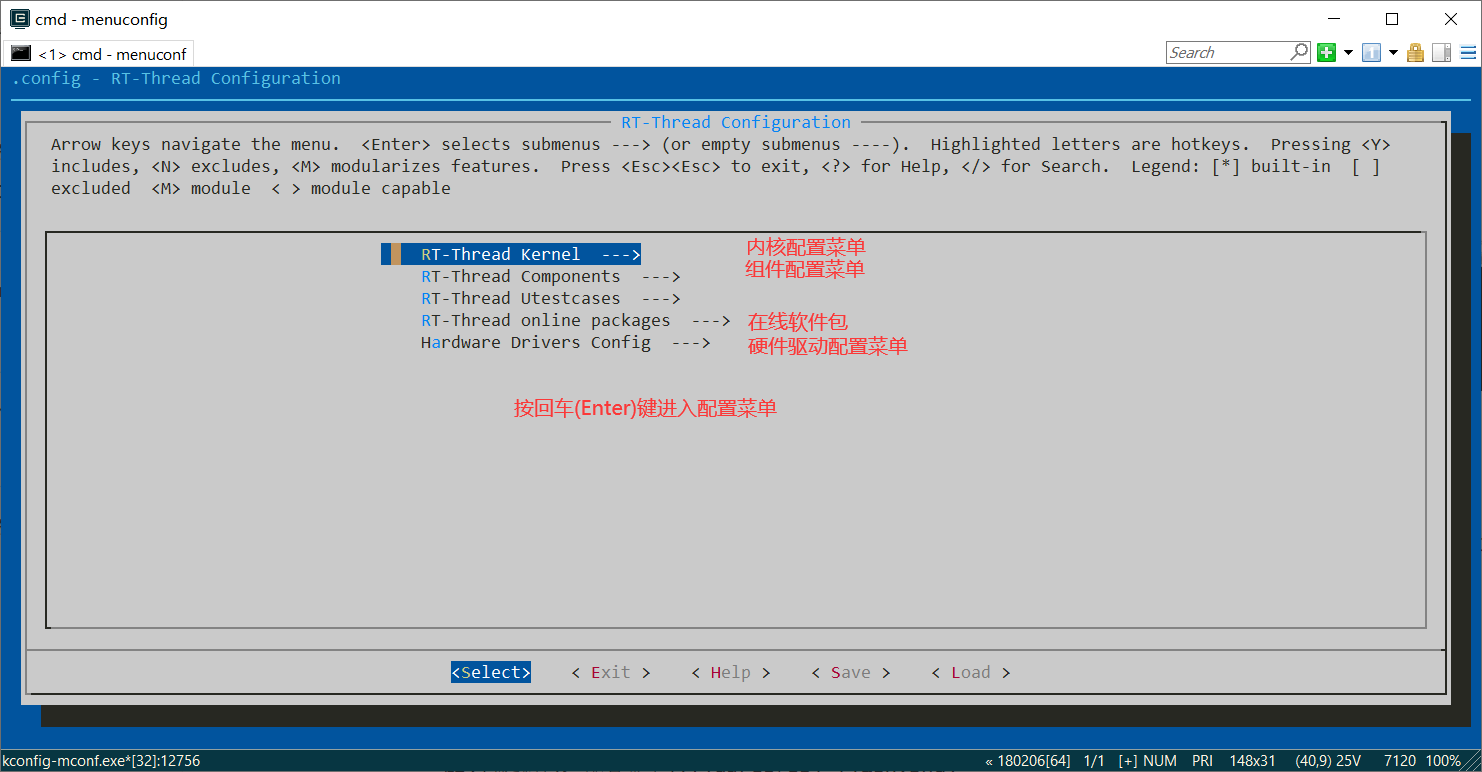
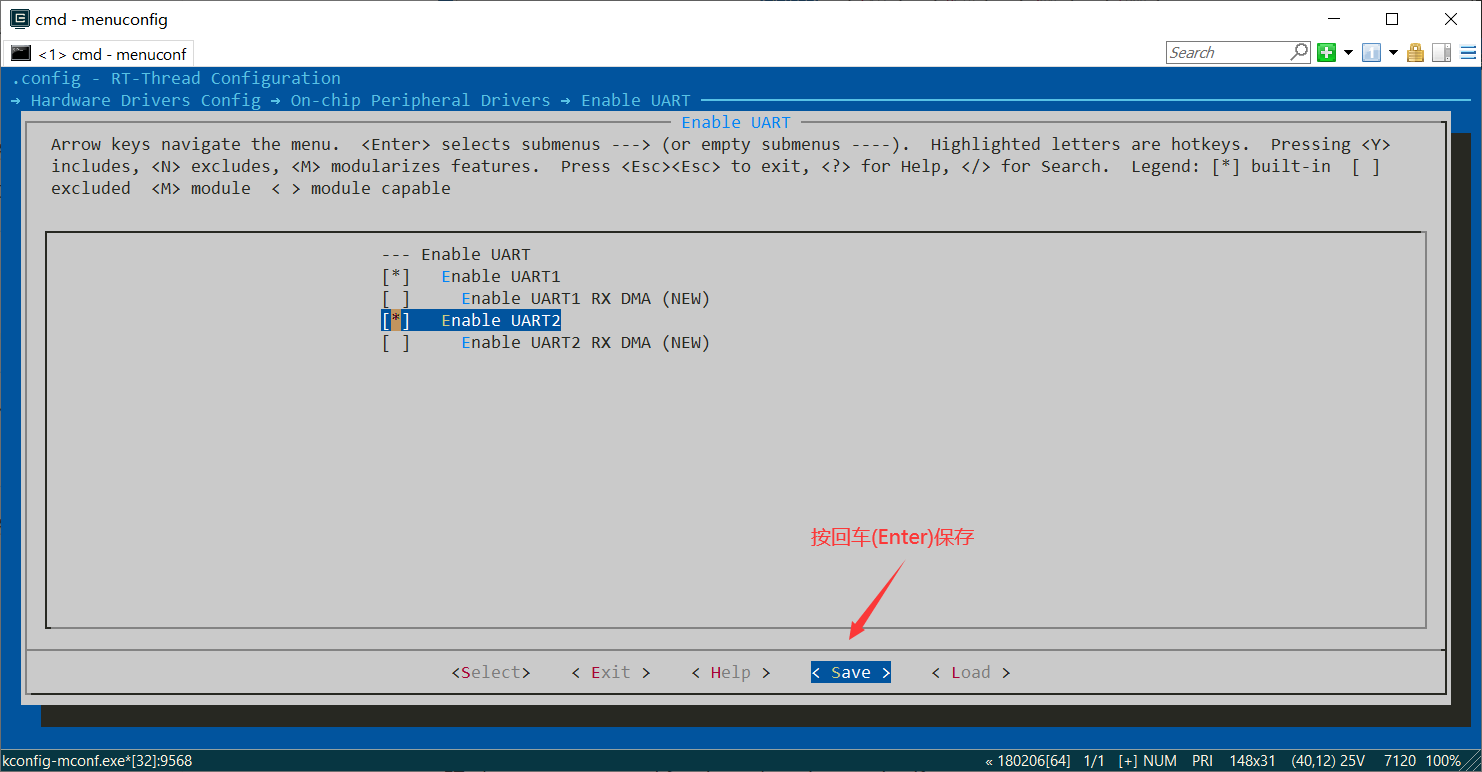
bsp/gd32/docs/figures/config1.png
0 → 100644
{kind=link}
51.2 KB
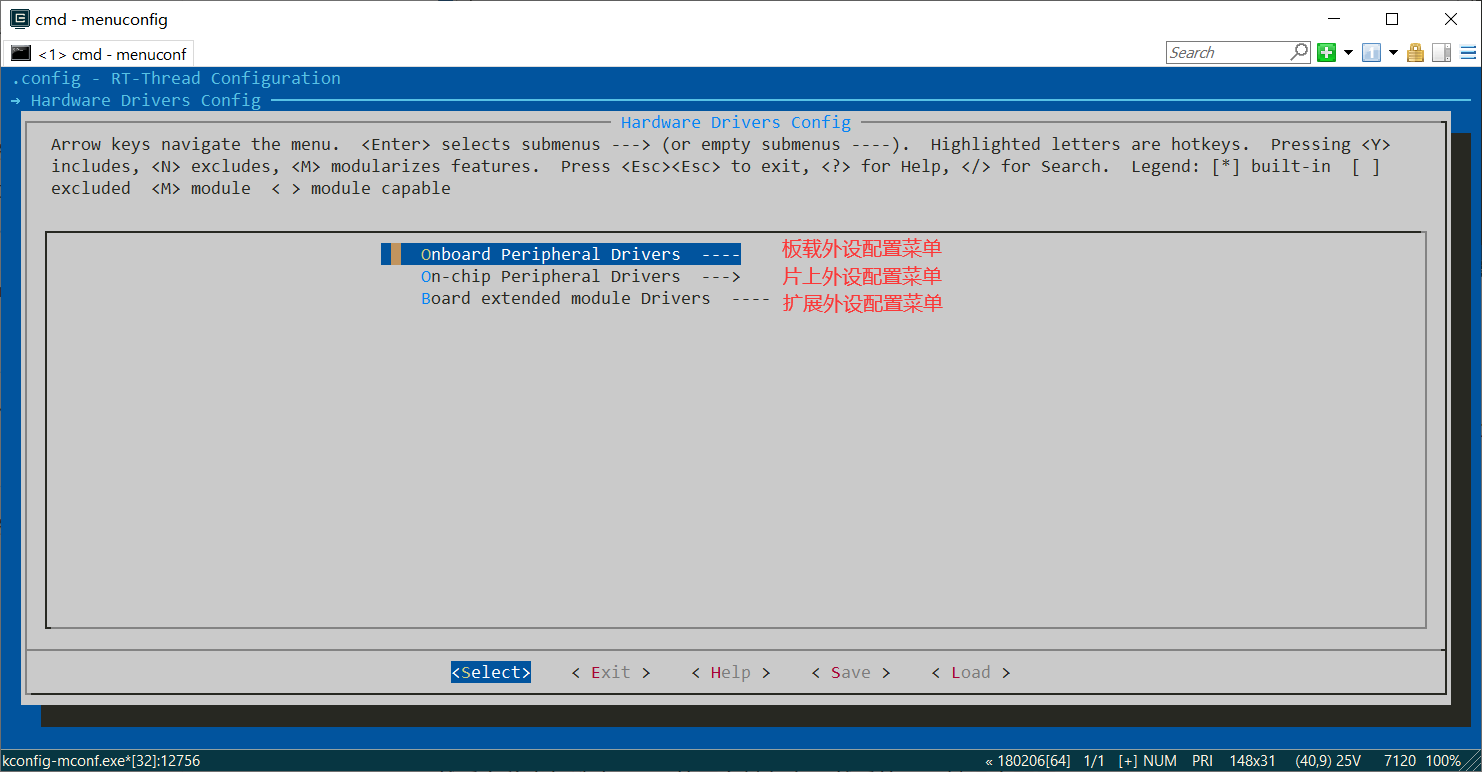
bsp/gd32/docs/figures/config2.png
0 → 100644
{kind=link}
47.4 KB
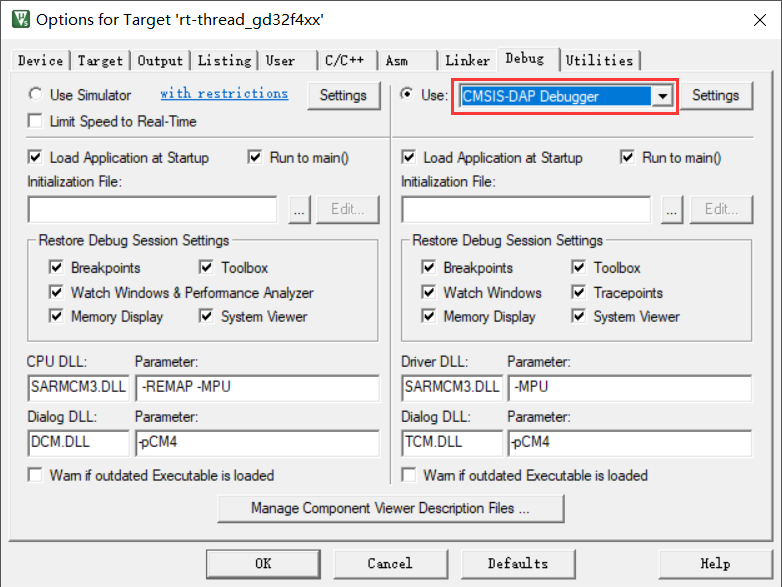
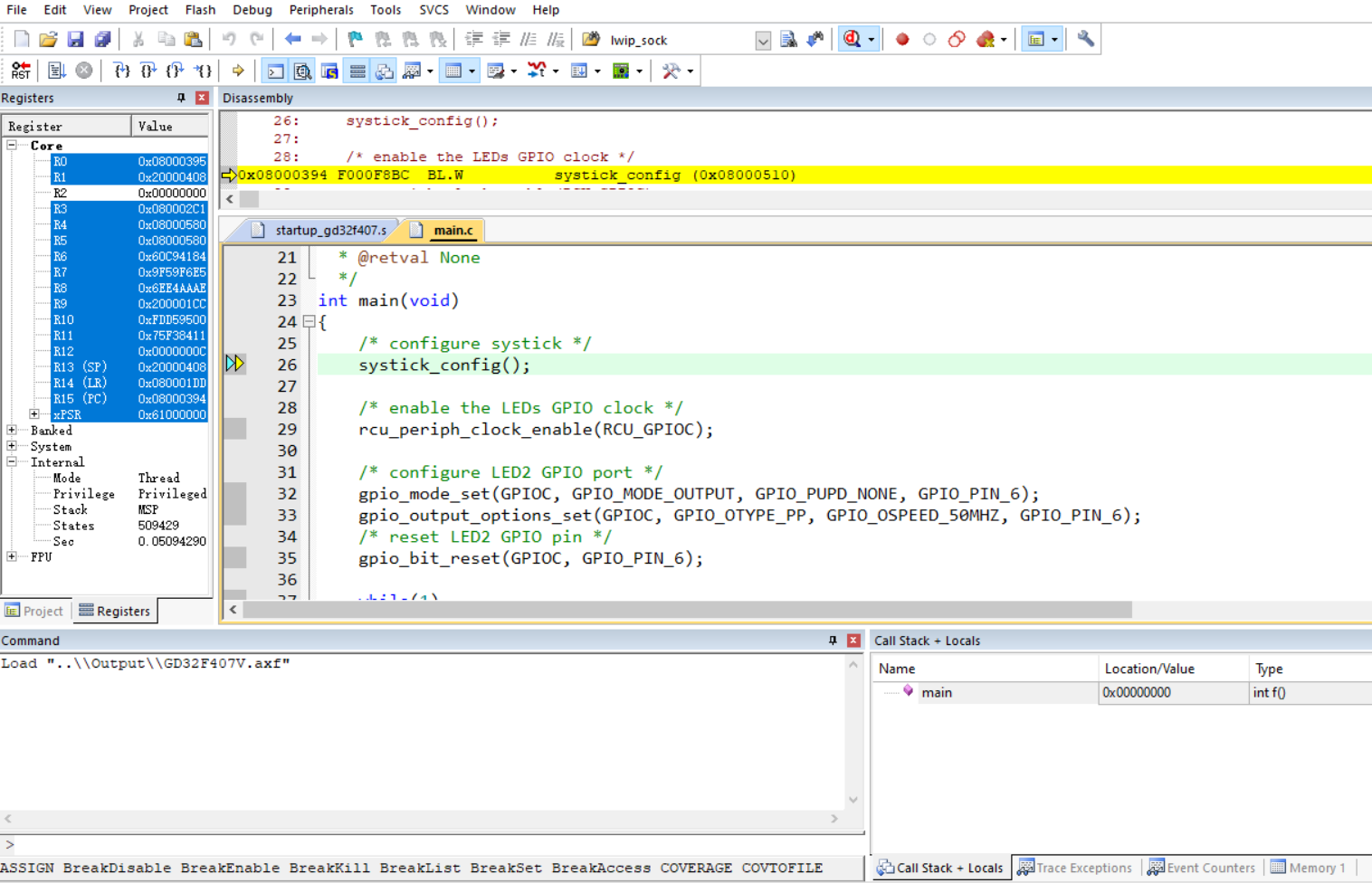
bsp/gd32/docs/figures/debug.png
0 → 100644
{kind=link}
122.4 KB
{kind=link}
31.7 KB
{kind=link}

23.5 KB
{kind=link}

23.5 KB
{kind=link}

14.1 KB
{kind=link}
7.9 KB
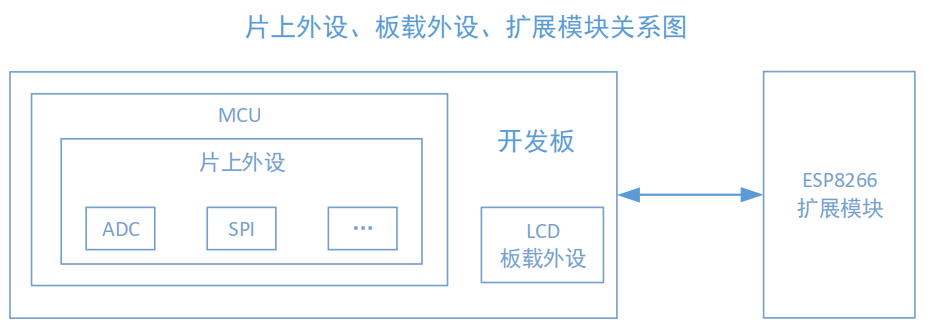
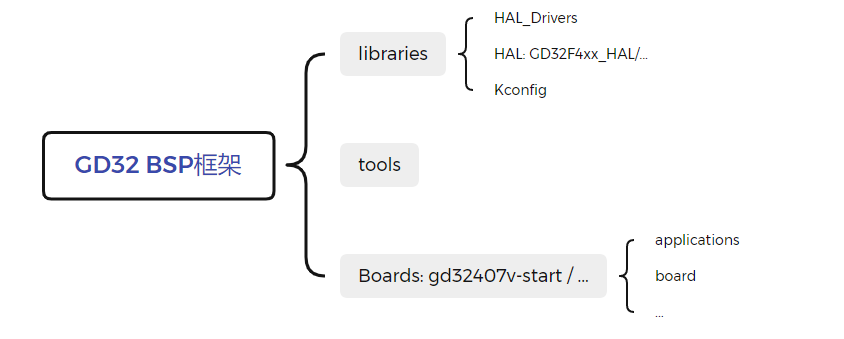
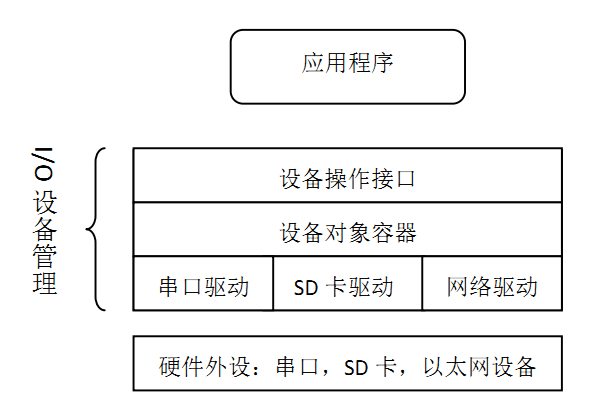
bsp/gd32/docs/figures/frame.png
0 → 100644
{kind=link}
23.1 KB
{kind=link}
279.0 KB
{kind=link}

13.3 KB
{kind=link}
207.5 KB
{kind=link}
36.4 KB
{kind=link}
58.7 KB
{kind=link}

26.8 KB
{kind=link}
25.4 KB
bsp/gd32/docs/figures/rename.png
0 → 100644
{kind=link}
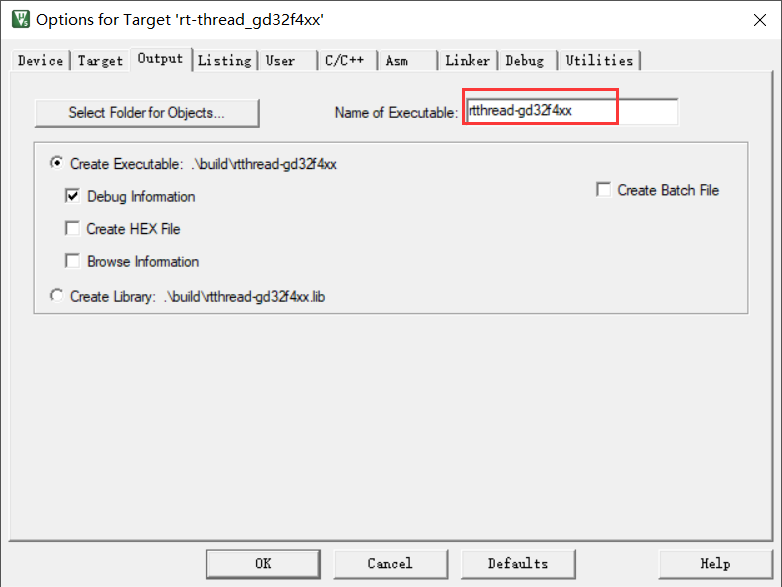
50.4 KB
{kind=link}
62.0 KB
{kind=link}
30.7 KB
{kind=link}
18.5 KB
bsp/gd32/docs/figures/save.png
0 → 100644
{kind=link}
48.5 KB
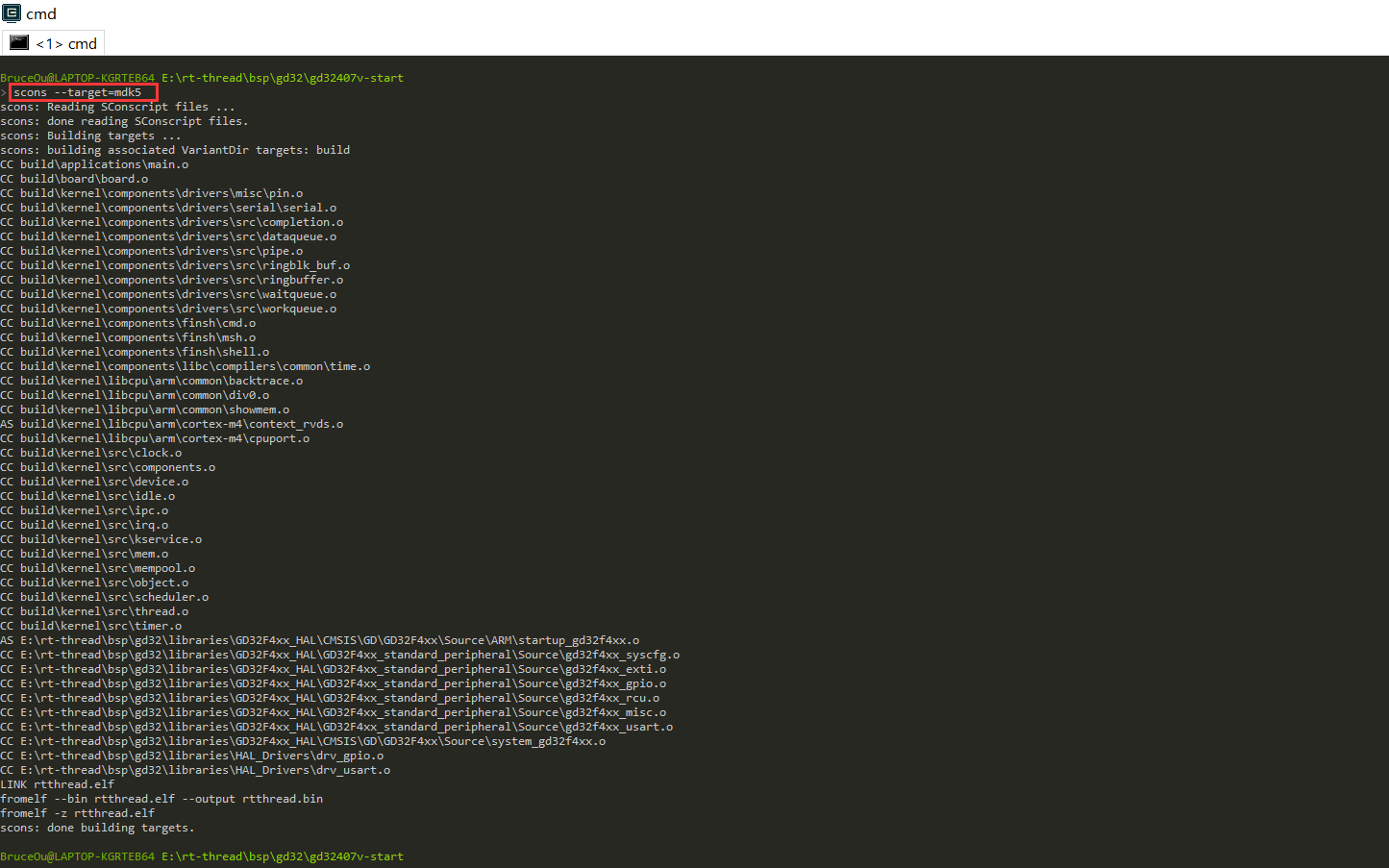
bsp/gd32/docs/figures/scons.png
0 → 100644
{kind=link}

14.3 KB
{kind=link}
14.8 KB
{kind=link}
92.3 KB
{kind=link}

13.1 KB
{kind=link}
28.3 KB
{kind=link}
18.8 KB
bsp/gd32/docs/figures/storage.png
0 → 100644
{kind=link}
105.4 KB
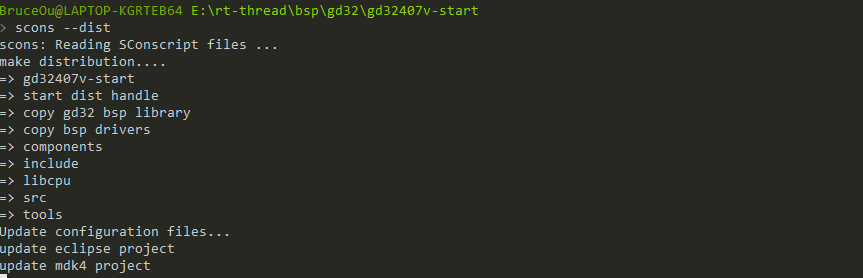
bsp/gd32/docs/figures/update.png
0 → 100644
{kind=link}

30.9 KB