Merge branch 'develop' of https://github.com/PaddlePaddle/Paddle into my_spp_op
Showing
doc/design/fluid-compiler.graffle
0 → 100644
文件已添加
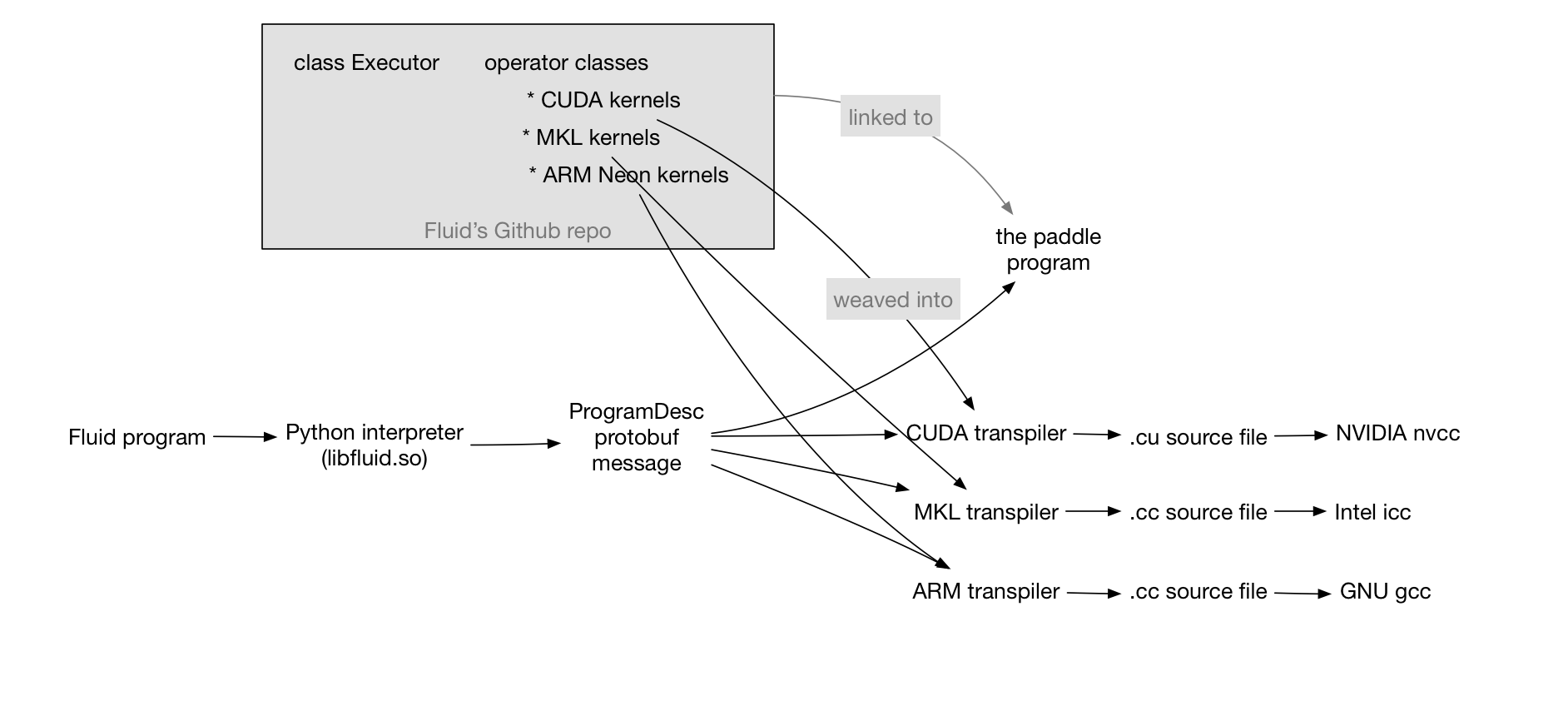
doc/design/fluid-compiler.png
0 → 100644
{kind=link}
121.2 KB
doc/design/fluid.md
0 → 100644
文件已添加
{kind=link}
108.4 KB
文件已添加
{kind=link}
32.8 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
doc/design/mkl/mkl_packed.md
0 → 100644
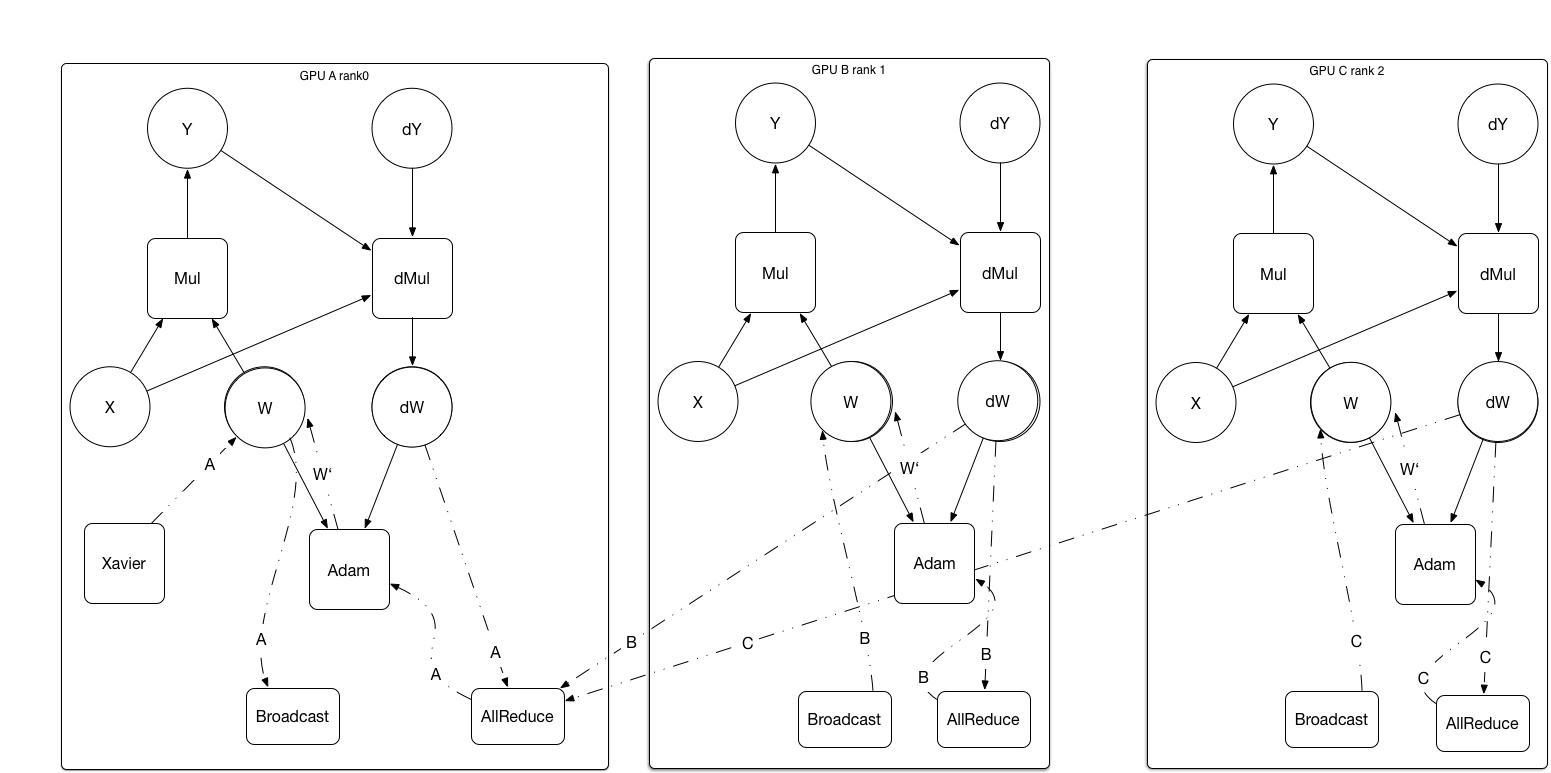
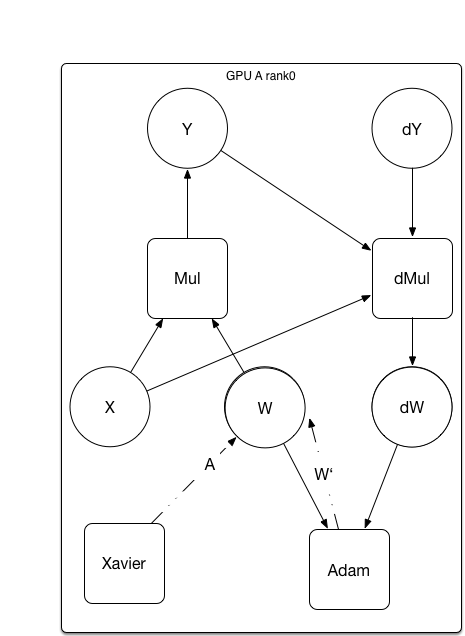
doc/design/paddle_nccl.md
0 → 100644
doc/design/support_new_device.md
0 → 100644
此差异已折叠。
此差异已折叠。